NGHIÊN CỨU GIẢI PHÁP THIẾT BỊ ĐIỀU KHIỂN TỰ ĐỘNG HỆ THỐNG SAN PHẲNG MẶT ĐỒNG ỨNG DỤNG CÔNG NGHỆ LASER VÀ MÔ PHỎNG BỀ MẶT SAN PHẲNG
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (10.08 MB, 134 trang )
BỘ GIÁO DỤC VÀ ĐÀO TẠO
ĐẠI HỌC NÔNG LÂM THÀNH PHỐ HỒ CHÍ MINH
****************
TRẦN MINH LỘC
NGHIÊN CỨU GIẢI PHÁP THIẾT BỊ ĐIỀU KHIỂN
TỰ ĐỘNG HỆ THỐNG SAN PHẲNG MẶT ĐỒNG
ỨNG DỤNG CÔNG NGHỆ LASER VÀ MÔ PHỎNG
BỀ MẶT SAN PHẲNG
LUẬN VĂN THẠC SĨ KHOA HỌC KỸ THUẬT
Thành Phố Hồ Chí Minh
Tháng 02/2011
BỘ GIÁO DỤC VÀ ĐÀO TẠO
ĐẠI HỌC NÔNG LÂM THÀNH PHỐ HỒ CHÍ MINH
****************
TRẦN MINH LỘC
NGHIÊN CỨU GIẢI PHÁP THIẾT BỊ ĐIỀU KHIỂN
TỰ ĐỘNG HỆ THỐNG SAN PHẲNG MẶT ĐỒNG
ỨNG DỤNG CÔNG NGHỆ LASER VÀ MÔ PHỎNG
BỀ MẶT SAN PHẲNG
Chuyên ngành : Kỹ thuật Cơ khí
Mã số : 60 52 14
LUẬN VĂN THẠC SĨ KHOA HỌC KỸ THUẬT
Hướng dẫn khoa học
TS. NGUYỄN VĂN HÙNG
Thành Phố Hồ Chí Minh
Tháng 02/2011
NGHIÊN CỨU GIẢI PHÁP THIẾT BỊ ĐIỀU KHIỂN TỰ ĐỘNG HỆ THỐNG
SAN PHẲNG MẶT ĐỒNG ỨNG DỤNG CÔNG NGHỆ LASER VÀ MÔ
PHỎNG BỀ MẶT SAN PHẲNG
TRẦN MINH LỘC
Hội đồng chấm luận văn:
TS. NGUYỄN NHƯ NAM
1. Chủ tịch:
Đại học Nông Lâm TP. HCM
TS. LÊ ANH ĐỨC
2. Thư ký:
Đại học Nông Lâm TP. HCM
3. Phản biện 1:
TS. PHAN HIẾU HIỀN
Đại học Nông Lâm TP. HCM
4. Phản biện 2:
PGS. TS. TRẦN THỊ THANH
Đại học Nông Lâm TP. HCM
5. Uỷ viên:
TS. NGUYỄN VĂN HÙNG
Đại học Nông Lâm TP. HCM
TRƯỜNG ĐẠI HỌC NÔNG LÂM TP. HỒ CHÍ MINH
HIỆU TRƯỞNG
i
LÝ LỊCH CÁ NHÂN
Tôi tên là Trần Minh Lộc, sinh ngày 20 tháng 09 năm 1978, tại huyện Đức
Phổ, tỉnh Quảng Ngãi.
Con Ông Trần Minh Bảo và Bà Nguyễn Thị Bờ.
Tốt nghiệp tú tài tại trường Trung học phổ thông Đức Phổ I, tỉnh Quảng Ngãi
năm 1998.
Tốt nghiệp Đại học năm 2003, ngành Cơ khí chế tạo máy, hệ dài hạn tập trung,
tại trường Đại học Sư Phạm Kỹ Thuật, thành phố Hồ Chí Minh.
Sau đó làm việc tại liên tục tại các đơn vị sau:
Tháng 2 năm 2003 đến 8/2005 làm việc tại công ty TNHHTM&DV VPS, chức
vụ kỹ sư thiết kế.
Tháng 9/2005 đến nay, Giảng viên khoa Cơ Khí Trường Cao Đẳng Công Nghệ
Thủ Đức, thành phố Hồ Chí Minh.
Tháng 9 năm 2008 theo học Cao học ngành Cơ khí tại Đại học Nông Lâm, Thủ
Đức, thành phố Hồ Chí Minh.
Tình trạng gia đình: Độc thân
Địa chỉ liên lạc: 103/9A đường Dương Đình Hội, khu phố 5, phường Phước
Long B quận 9, thành phố Hồ Chí Minh.
Điện thoại DĐ: 0983.383.337
Cơ quan: Số 53 Võ Văn Ngân, phường Linh Chiểu, quận Thủ Đức, thành phố
Hồ Chí Minh.
Điện thoại: 08.22158645
Email:
ii
LỜI CAM ĐOAN
Tôi cam đoan đây là công trình nghiên cứu của tôi.
Các số liệu kết qủa trong luận văn là trung thực và chưa từng được ai công bố
trong bất kỳ công trình nào khác.
Tác giả luận văn
Trần Minh Lộc
iii
CẢM TẠ
Để hoàn thành luận văn thạc sĩ này tôi xin chân thành bày tỏ lòng kính trọng
và biết ơn sâu sắc đến:
Tiến sĩ Nguyễn Văn Hùng, Trưởng bộ môn Cơ điện tử Trường Đại học Nông
lâm thành phố Hồ Chí Minh – Giáo viên hướng dẫn đề tài. Thầy đã tận tình chỉ bảo,
giúp đỡ tạo mọi điều kiện thuận lợi cho tôi trong suốt quá trình làm đề tài. Qua thời
gian làm việc cùng thầy, tôi đã có được những kiến thức nghiên cứu khoa học, cách
nhận định đánh giá một vấn đề,… Đó là nền tảng cho tôi tiếp bước vững chắc trong
công tác giảng dạy của mình sau này.
Ban giám hiệu, Phòng sau đại học, Cô PGS.TS Trần Thị Thanh, Chủ nhiệm
Khoa và tập thể Giảng viên của Khoa Cơ khí - Công nghệ, Trường Đại học Nông
Lâm thành phố Hồ Chí Minh đã tận tình giảng dạy, truyền đạt những kiến thức quí
báu và tạo mọi điều kiện tốt nhất trong quá trình học Cao học cũng như thực hiện
luận văn.
Ban lãnh đạo và quý thầy cô tại Trung tâm Năng Lượng và Máy Nông Nghiệp
(CAEM), Trường Đại Học Nông Lâm Tp.Hồ Chí Minh đã cung cấp những thông
tin liên quan tới đề tài, hướng dẫn, tạo điều kiện để đề tài được triển khai.
Ban giám đốc công ty Cổ Phần Nông Nghiệp Lý Tưởng đã hỗ trợ kinh phí cho
đề tài.
Xin cảm ơn quý thầy, cô đã phản biện đề tài và cho những lời nhận xét qúi
báu. Qua những phản hồi đó tôi có thể để hoàn thiện hơn quá trình nghiên cứu.
Các anh chị học viên lớp cao học khóa 2007 và 2008 đã hỗ trợ, giúp đỡ, động
viên chia sẻ kinh nghiệm làm việc.
Cảm ơn cha mẹ, anh em, bạn bè cùng đồng nghiệp đã tạo mọi điều kiện tốt
nhất trong suốt quá trình học tập cũng như làm đề tài.
iv
TÓM TẮT
Đề tài “Nghiên cứu giải pháp thiết bị điều khiển tự động hệ thống san phẳng
mặt đồng ứng dụng công nghệ laser và mô phỏng bề mặt san phẳng. ” được tiến
hành tại Khoa Cơ khí – Công nghệ và Trung tâm Năng lượng và Máy Nông nghiệp
Trường Đại học Nông lâm Thành phố Hồ Chí Minh, thời gian từ tháng 03 năm 2010
đến tháng 12 năm 2010 với kết quả được tóm tắt như sau:
Nghiên cứu, cải tiến cụm van thủy lực từ hệ thống ngoại nhập, khắc phụ được
hiện tượng nóng dầu trong quá trình hoạt động của hệ thống.
Nghiên cứu chế tạo thành công bộ điều khiển PLC thay cho bộ điều khiển
ngoại nhập, góp phần nội địa hóa các thiết bị điều khiển.
Nghiên cứu, thiết kế, chế tạo bộ giảm chấn và cơ cấu nâng hạ gàu san nhằm
khắc phục hiện tượng rung động và nâng bánh xe cụm gàu san lên khỏi mặt đồng
khi gàu san ở vùng đất cao.
Một chương trình mô phỏng bề mặt đồng được viết trên phần mềm Matlab 7.5
để mô phỏng và tính toán cho quá trình san phẳng. Kết quả tính toán và mô phỏng
được thể hiện bằng giao diện trực quan. Chương trình này giúp chúng ta có thể xác
định được độ nhấp nhô ban đầu của khu đất, dễ dàng tìm ra đường chạy hợp lý cho
máy kéo đồng thời tính toán thời gian và ước lượng chi phí cho quá trình san phẳng.
v
ABSTRACT
The thesis "Study on automatic controlling solutions of a laser land leveling
system and simulation the field surface applied leveling" was done at the Faculty of
Engineering and the Center for Energy and Agriculture Machinery, Nong Lam
University of Ho Chi Minh City, from March to December 2010 with the summary
results as following:
Improved the hydraulic system, resolved phenomenon the hot oil happening
during the operational process.
Designed and manufactured the PLC controller in order to replace the
imported one and reduce the equipment cost.
Designed and manufactured the damping and lifting device for the scraper to
reduce the “shock” phenomenon.
A program was written based on the Matlab 7.5 software to simulate and
calculate for the operational process. Results of calculation and simulation are
represented by visual interface. This program is very helpful for determining the
first undulating of land, finding a logical route of tractors and calculating leveling
cost.
vi
MỤC LỤC
TRANG
Trang chuẩn Y..................................................................................................i
Lý lịch cá nhân ................................................................................................ii
Lời cam đoan..................................................................................................iii
Cảm tạ............................................................................................................ iv
Tóm tắt............................................................................................................ v
Tóm tắt tiếng Anh .......................................................................................... vi
Mục lục ......................................................................................................... vii
Bảng ký hiệu các chữ viết tắt.......................................................................... xi
Danh sách liệt kê các ký hiệu.........................................................................xii
Danh sách các hình....................................................................................... xiv
Danh sách các bảng ..................................................................................... xvii
1. MỞ ĐẦU ............................................................................................................ 1
1.1 Đặt vấn đề....................................................................................................... 1
1.2 Mục tiêu đề tài ................................................................................................ 3
1.3 Phạm vi nghiên cứu ........................................................................................ 3
2. TỔNG QUAN .................................................................................................... 4
2.1 Đối tượng nghiên cứu ..................................................................................... 4
2.1.1 Cấu tạo và nguyên lý hoạt động của hệ thống san phẳng laser ................... 4
2.1.2 Bộ phát laser ............................................................................................. 6
2.1.3 Bộ nhận laser............................................................................................. 7
2.1.4 Hộp điều khiển ......................................................................................... 8
2.1.5 Hệ thống thủy lực...................................................................................... 9
2.1.6 Gàu san….................................................................................................11
2.2 Cơ sở tính toán và thiết kế hệ thống thủy lực..................................................12
2.2.1 Cơ sở tính toán bơm .................................................................................12
2.2.1.1 Các đại lượng đặc trưng của bơm....................................................... 12
vii
2.2.1.2 Tiêu chuẩn chọn bơm......................................................................... 15
2.2.2 Các loại van thủy lực ứng dụng trong mạch điều khiển tự động................15
2.2.2.1 Van đảo chiều.................................................................................... 15
2.2.2.2 Van solenoid ứng dụng trong điều khiển tự động ............................... 17
2.2.2.3 Van servo .......................................................................................... 18
2.2.3 Cơ sở tính toán và thiết kế xi lanh thủy lực...............................................20
2.3 Một số nghiên cứu về hệ thống san phẳng laser..............................................23
2.3.1 Tại Việt Nam............................................................................................23
2.3.2 Một số nghiên cứu về hệ thống san phẳng laser của thế giới. ....................24
3. NỘI DUNG VÀ PHƯƠNG PHÁP NGHIÊN CỨU.........................................29
3.1 Nội dung nghiên cứu......................................................................................29
3.2 Phương pháp nghiên cứu...............................................................................29
3.2.1 Phương pháp nghiên cứu lý thuyết ...........................................................29
3.2.1.1 Phương pháp tiếp cận hệ thống .......................................................... 29
3.2.1.2 Phương pháp thiết kế hệ thống thủy lực ............................................ 30
3.2.1.3 Phương pháp thiết kế bộ phận điều khiển tự động.............................. 31
3.2.2 Phương pháp nghiên cứu thực nghiệm......................................................31
3.2.2.1 Phạm vi khảo nghiệm và thiết bị thí nghiệm ...................................... 31
3.2.2.2 Thiết bị dụng cụ đo ............................................................................ 32
3.2.2.3 Phương pháp đo................................................................................. 32
3.2.3 Phương pháp đo và mô phỏng bề mặt đồng ..............................................33
3.2.3.1 Phương pháp đo bề mặt đồng............................................................. 33
3.2.3.2 Phương pháp mô phỏng bề mặt đồng ................................................. 34
3.2.4 Phương pháp nội suy Spline bậc hai tìm hàm mô phỏng bề mặt đồng.......35
3.2.5 Phương pháp tính toán thể tích đất tại các vùng........................................37
3.2.6 Phương pháp khảo nghiệm đánh giá các bộ phận đã chế tạo.....................39
4. KẾT QUẢ VÀ THẢO LUẬN...........................................................................40
4.1 Giải pháp mô phỏng bề mặt đồng và tính toán các thông số trong
quá trình san phẳng ........................................................................................40
viii
4.1.2 Tìm đường chạy hợp lý và tính thời gian san phẳng..................................42
4.1.3 Đề xuất đường chạy và tính thời gian khi san tinh ....................................47
4.1.4 Giải thuật chương trình Matlab tìm đường chạy hợp lý và tính thời gian
san phẳng ...............................................................................................48
4.2 Kết quả ứng dụng khảo nghiệm thực tế ..........................................................50
4.2.1 Kết khảo nghiệm theo thực tế ...................................................................50
4.2.2 Kết quả mô phỏng và tính toán theo lý thuyết...........................................52
4.2.2.1 Kết quả mô phỏng và tính toán cho lô đất thứ nhất ............................ 52
4.2.2.2 Kết quả mô phỏng và tính toán cho lô đất thứ hai .............................. 54
4.2.2.3 Kết quả mô phỏng và tính toán cho lô đất thứ ba ............................... 56
4.2.2.4 Kết quả mô phỏng và tính toán cho lô đất thứ tư ................................ 57
4.2.2.5 Kết quả tính thời gian san tinh ........................................................... 59
4.3 Thiết kế một số bộ phận của hệ thống điều khiển ...........................................60
4.3.1 Thiết kế hệ thống thủy lực ........................................................................60
4.3.1.1 Tính toán bơm ................................................................................... 60
4.3.1.2 Tính toán xi lanh truyền lực ............................................................... 60
4.3.1.3 Lựa chọn van và thiết kế mạch thủy lực ............................................. 64
4.3.2 Thiết kế bộ phận điều khiển......................................................................66
4.3.2.1 Yêu cầu thiết kế ................................................................................. 66
4.3.2.2 Thành lập bảng ngõ vào và ngõ ra của PLC ....................................... 68
4.3.2.3 Kết nối PLC với các thiết bị vào và ra................................................ 68
4.4 Thiết kế thử nghiệm bộ phận giảm chấn.........................................................70
4.4.1 Yêu cầu thiết kế........................................................................................71
4.4.2 Tính toán lò xo giảm chấn ........................................................................71
4.4.3 Kiểm tra lò xo theo hệ số an toàn..............................................................74
4.4.4 Mô phỏng quá trình dao động của lò xo...................................................74
4.5 Khảo nghiệm đánh giá các bộ phận được thiết kế...........................................77
5. KẾT LUẬN VÀ KIẾN NGHỊ ..........................................................................84
5.1 Kết luận .........................................................................................................84
ix
5.2 Kiến nghị .......................................................................................................84
TÀI LIỆU THAM KHẢO....................................................................................86
PHỤ LỤC..............................................................................................................88
Phụ lục 1. Các loại bơm và van thủy lực .............................................................88
Phụ lục 2. Sơ lược về PLC LOGO để thiết kế mạch điều khiển..........................94
Phụ lục 3. Kết quả khảo nghiệm thực tế ..............................................................97
Phụ lục 4. Kết quả khảo nghiệm đánh giá các bộ phận được thiết kế.................103
Phụ lục 5. Chương trình Matlab mô phỏng mặt đồng và PLC LOGO...............106
x
BẢNG KÝ HIỆU CÁC CHỮ VIẾT TẮT
Ký hiệu viết tắt
ASABE
CAEM
CNH – HĐH
Viết đầy đủ
Hiệp Hội Nông Nghiệp Mỹ
Trung Tâm Năng Lượng và Máy Nông Nghiệp Trường
Đại Học Nông Lâm Tp. Hồ Chí Minh
Công nghiệp hóa – Hiện đại hóa
ctv
Cộng tác viên
DC
Dòng điện một chiều
ĐBSCL
Đồng bằng sông Cửu Long
ĐBSH
Đồng bằng sông Hồng
IRRI
Viện nghiên cứu lúa Quốc tế
PLC
Lập trình điều khiển logic
xi
DANH SÁCH LIỆT KÊ CÁC KÝ HIỆU
Ký hiệu
Đơn vị
Ý nghĩa
A
cm2
a
m
Chiều dài khu đất
b
m
Chiều rộng khu đất
bgs
m
Bề rộng gàu san
c
-
Chỉ số lò xo
D
mm
Đường kính trung bình của lò xo
d
mm
Đường kính dây lò xo
F
N
Lực tác dụng lên pittông
FA
N
Trọng lực
FG
N
Lực gia tốc
FR
N
Lực ma sát
G
MPa
Mô dul đàn hồi trượt
h
mm
Chiều cao mặt đồng
htb
mm
Chiều cao trung bình của mặt đồng
H0
mm
Chiều cao ban đầu của lò xo
Hs
mm
Chiều cao khi xít nhau của lò xo
k
-
Lij
km
M
N.m
n
-
p
N/m2
Pgs
N
Trọng lượng gàu san
q
lít/phút
Lưu lượng của bơm
Tthô
h
Diện tích tiết diện pittông
Độ cứng của lò xo
Chiều dài đường chạy của máy kéo từ
vùng i tới vùng j
Mô men quay
Số vòng làm việc của lò xo
Áp suất
Thời gian san thô
xii
Ttinh
h
Thời gian san tinh
V
m3
Thể tích phần đất cần san
V1, V2, V3, V4
m3
Vgs
m3
Thể tích gàu san
Vt
m3
Thể tích đất thực tế chứa trong gàu san
v
km/h
Vận tốc trung bình máy kéo
ρ
kg/m3
Khối luợng riêng
η
%
[τ]
MPa
Ứng suất xoắn cho phép
τa
MPa
Biên độ ứng suất xoắn
τm
MPa
Ứng suất xoắn trung bình
τb
MPa
Giới hạn bền xoắn
τch
MPa
Giới hạn chảy
τ-1
MPa
Giới hạn mỏi xoắn
σb
MPa
Giới hạn bền
Thể tích phần đất nhô cao so với mặt
phẳng trung bình tại các vùng 1, 2, 3, 4
Hiệu suất bơm
xiii
DANH SÁCH CÁC HÌNH
HÌNH
TRANG
Hình 2.1 Sơ đồ nguyên lý hệ thống máy san phẳng laser.........................................4
Hình 2.2 Hệ thống san phẳng laser lắp trên máy kéo MTZ 80.................................5
Hình 2.3 Cấu tạo bộ phát laser ...............................................................................6
Hình 2.4 Bộ nhận lắp trên dụng cụ đo độ cao..........................................................8
Hình 2.5 Bộ nhận lắp trên gàu san ..........................................................................8
Hình 2.6 Hộp điều khiển (Control box)...................................................................8
Hình 2.7 Sơ đồ kết nối hộp điều khiển với các thiết bị ............................................9
Hình 2.8 Cụm van thủy lực 3/2 ............................................................................. 10
Hình 2.9 Sơ đồ hệ thống thủy lực dùng cụm van 3/2............................................. 10
Hình 2.10 Gàu san dài 2m..................................................................................... 11
Hình 2.11 Sự thay đổi áp suất làm việc theo thời gian........................................... 12
Hình 2.12 Ảnh hưởng các hệ số tổn thất đến hiệu suất .......................................... 13
Hình 2.13 Van đảo chiều 3/2................................................................................. 16
Hình 2.14 Van đảo chiều 4/3................................................................................. 16
Hình 2.15 Kết cấu và ký hiệu van solenoid điều khiển trực tiếp ............................ 17
Hình 2.16 Kết cấu và ký hiệu van solenoid điều khiển gián tiếp............................ 18
Hình 2.17 Sơ đồ nguyên lý của bộ phận điều khiển van servo............................... 18
Hình 2.18 Kết cấu của van servo 3 cấp điều khiển có cảm biến............................. 20
Hình 2.19 Kết cấu của xi lanh hai chiều................................................................ 21
Hình 2.20 Kết cấu gàu san rộng 3m ...................................................................... 25
Hình 2.21 Hệ thống máy san phẳng laser trên ruộng lúa ....................................... 26
Hình 2.22 Sơ đồ nguyên lý của hệ thống san phẳng laser trên ruộng lúa ............... 26
Hình 2.23 Hệ thống thủy lực máy san phẳng laser trên ruộng lúa.......................... 27
Hình 3.1 Các dụng cụ đo....................................................................................... 32
Hình 3.2 Phương pháp đo độ cao bề mặt đồng ..................................................... 33
xiv
Hình 3.3 Mô phỏng bề mặt đồng........................................................................... 35
Hình 4.1 Giao diện chính mô phỏng mặt đồng ...................................................... 41
Hình 4.2 Kết quả mô phỏng và tính toán ............................................................... 42
Hình 4.3 Mặt bằng của khu đất ............................................................................. 43
Hình 4.4 Phương pháp di chuyển máy kéo khi san tinh......................................... 47
Hình 4.5 Kích thước thực tế của khu đất ............................................................... 51
Hình 4.6 Thực trạng mặt đồng của lô đất thứ nhất................................................. 52
Hình 4.7 Hình chiếu mặt bằng của lô đất thứ nhất................................................. 53
Hình 4.8 Thực trạng mặt đồng của lô đất thứ hai................................................... 55
Hình 4.9 Hình chiếu mặt bằng của lô đất thứ hai................................................... 55
Hình 4.10 Thực trạng mặt đồng của lô đất thứ ba.................................................. 56
Hình 4.11 Hình chiếu mặt bằng của lô đất thứ ba.................................................. 57
Hình 4.12 Thực trạng mặt đồng của lô đất thứ tư .................................................. 58
Hình 4.13 Hình chiếu mặt bằng của lô đất thứ tư .................................................. 58
Hình 4.14 Gàu san khi di chuyển trên mặt đồng.................................................... 61
Hình 4.15 Sơ đồ phân tích lực tác dụng lên hệ thống ở trạng thái tĩnh................... 62
Hình 4.16 Sơ đồ hệ thống thủy lực dùng cụm van 4/3 ........................................... 65
Hình 4.17 Sơ đồ khối hoạt động của hệ thống san phẳng laser ............................. 66
Hình 4.18 Lưu đồ giải thuật điều khiển PLC ......................................................... 67
Hình 4.19 Bộ điều khiển PLC LOGO ................................................................... 67
Hình 4.20 Sơ đồ kết nối PLC với thiết bị của hệ thống.......................................... 68
Hình 4.21 Gàu san hạ quá thấp khi đang ở vùng cao ............................................. 71
Hình 4.22 Bộ giảm chấn lắp trên cụm gàu san ...................................................... 71
Hình 4.23 Bộ giảm chấn và cơ cấu nâng, hạ gàu san đã được chế tạo.................... 74
Hình 4.24 Vùng làm việc nguy hiểm của lò xo...................................................... 75
Hình 4.25 Các dạng dao động của bộ giảm chấn ................................................... 76
Hình 4.26 Nhiệt độ dầu theo thời gian................................................................... 78
Hình 4.27 Đồ thị áp suất nâng hạ gàu san ở chế độ không tải................................ 79
Hình 4.28 Đồ thị áp suất nâng hạ gàu san ở chế độ có tải...................................... 80
xv
Hình 4.29 Chiều cao nhấp nhô ban đầu................................................................. 81
Hình 4.30 Độ nhấp nhô mặt đồng sau ba lần chạy................................................. 81
Hình PL1.1 Bơm bánh răng ăn khớp ngoài ........................................................... 88
Hình PL1.2 Kết cấu bơm bánh răng ăn khớp ngoài............................................... 89
Hình PL1.3 Bơm bánh răng ăn khớp trong ........................................................... 90
Hình PL1.4 Sơ đồ van an toàn và van tràn ............................................................ 90
Hình PL1.5 Van tràn kiểu bi và kiểu côn .............................................................. 91
Hình PL1.6 Van an toàn ....................................................................................... 92
Hình PL1.7 Kết cấu van giảm áp .......................................................................... 93
Hình PL2.1 Sơ đồ điều khiển logic lập trình PLC ................................................. 94
Hình PL2.2 Sơ đồ kết nối PLC với các thiết bị điều khiển .................................... 96
Hình PL2.3 Sơ đồ kết nối đối với ngõ ra dạng transistor....................................... 97
xvi
DANH SÁCH CÁC BẢNG
BẢNG
TRANG
Bảng 2.1 Bảng tra các trị số áp suất và tỉ số k theo lực đẩy.................................... 22
Bảng 2.2 Bảng tra hiệu suất theo áp suất bơm ....................................................... 23
Bảng 3.1 Bảng giá trị chiều cao nhấp nhô mặt đồng so với mặt phẳng laser .......... 34
Bảng 3.2 Bảng giá trị độ nhấp nhô bề mặt đồng so với mặt phẳng trung bình........ 35
Bảng 4.1 Thời gian thực tế khi san phẳng cho từng lô đất ..................................... 51
Bảng 4.2 Bảng các ngõ vào và ngõ ra của PLC ..................................................... 68
Bảng 4.3 Bảng các thiết bị điều khiển PLC ........................................................... 69
Bảng 4.4 Thời gian nâng hạ của bộ điều khiển ...................................................... 79
Bảng 4.5 Kết quả chiều cao nhấp nhô của mặt đồng sau mỗi lần chạy................... 82
Bảng PL2.1 Các kiểu PLC LOGO ........................................................................ 95
Bảng PL3.1 Số liệu đo chiều cao của khu đất ....................................................... 98
Bảng PL3.2 Chiều cao đo thực tế của lô thứ nhất.................................................. 99
Bảng PL3.3 Chiều cao nhấp nhô so với mặt phẳng trung bình của lô thứ nhất ...... 99
Bảng PL3.4 Chiều cao đo thực tế của lô thứ hai.................................................. 100
Bảng PL3.5 Chiều cao nhấp nhô so với mặt phẳng trung bình của lô thứ hai ...... 100
Bảng PL3.6 Chiều cao đo thực tế của lô thứ ba................................................... 101
Bảng PL3.7 Chiều cao nhấp nhô so với mặt phẳng trung bình của lô thứ ba ....... 101
Bảng PL3.8 Chiều cao đo thực tế của lô thứ tư ................................................... 102
Bảng PL3.9 Chiều cao nhấp nhô so với mặt phẳng trung bình của lô thứ tư........ 102
Bảng PL4.1 Nhiệt độ tại ống dầu của hệ thống thủy lực...................................... 103
Bảng PL4.2 Kết quả đo thời gian nâng hạ của hệ thống điều khiển ..................... 104
Bảng PL4.3 Áp suất nâng hạ gàu san ở chế độ không tải khi không có
bộ giảm chấn................................................................................... 104
Bảng PL4.4 Áp suất nâng hạ gàu san ở chế độ không tải khi có bộ giảm chấn. ... 105
xvii
Bảng PL4.5 Áp suất nâng hạ gàu san ở chế độ có tải khi không có
bộ giảm chấn.................................................................................. 105
Bảng PL4.6 Áp suất nâng hạ gàu san ở chế độ có tải khi có bộ giảm chấn .......... 105
xviii
Chương 1
MỞ ĐẦU
1.1 Đặt vấn đề
Cơ giới hóa nông nghiệp là một nhiệm vụ hết sức quan trọng trong sự nghiệp
CNH – HĐH, nhất là trong giai đoạn hội nhập hiện nay. Thực hiện cơ giới hóa điện khí hóa nông nghiệp cũng tức là góp phần thúc đẩy chuyển đổi cơ cấu kinh tế
trong nông nghiệp.
Trong việc cơ giới trong nông nghiệp, khâu làm đất là hết sức cần thiết cho
việc gieo trồng, tưới tiêu và canh tác, đặc biệt là khâu san phẳng mặt đồng trước khi
gieo trồng. Nếu mặt đồng không được san phẳng, còn nhấp nhô thì tốn nhiều thời
gian cho công việc tưới tiêu và bón phân vì lượng nước và phân bón không được
phân bố đều trên đồng ruộng. Chính vì điều này sẽ tạo điều kiện cho cỏ dại và các
loại côn trùng gây hại phát triển làm ảnh hưởng đến năng suất cây trồng.
Với sự phát triển không ngừng của khoa học và công nghệ hiện nay, việc ứng
dụng hệ thống san phẳng mặt đồng bằng tia laser là hết sức cần thiết, hạn chế cỏ
dại, tiết kiệm nước trong khâu tưới tiêu, giảm thời gian tưới tiêu, tăng năng suất và
chất lượng. Thí nghiệm của Viện nghiên cứu lúa Quốc tế (IRRI) tại Philippines và
Campuchia, đã xác lập được các lợi điểm của mặt ruộng bằng phẳng đó là:
- Tăng năng suất lúa khoảng 0,5 tấn/ha;
- Dễ kiểm soát cỏ dại, do khống chế mức nước, giảm 70% công lao động làm
cỏ;
- Tăng diện tích hữu hiệu thêm khoảng 5 ÷ 7% vì không cần bờ ruộng;
- Vận hành máy canh tác hiệu quả hơn, do giảm được 10 ÷ 15% thời gian
quay vòng;
1
- Thuận tiện cho sử dụng máy xạ hàng;
- Tiết kiệm nước, ví dụ một cánh đồng chênh nhau 160 mm sẽ đòi hỏi 100
mm nước nhiều hơn, tức là hơn gấp đôi nhu cầu nước cho cây lúa. Nói chung
giảm nước còn một nữa.
Hệ thống san phẳng mặt đồng điều khiển bằng tia laser đã được Viện nghiên
cứu lúa Quốc tế (IRRI) chuyển giao kỹ thuật sử dụng cho Trung Tâm Năng Lượng
và Máy Nông Nghiệp (CAEM), Trường Đại học Nông Lâm Tp.HCM từ năm 2005
và đã tiến hành nghiên cứu và có những thiết kế để phù hợp với điều kiện ở Việt
Nam như: tính toán, thiết kế các loại gàu san phù hợp với các chủng loại máy kéo
khác nhau; hệ thống nâng hạ bằng thủy lực; sửa chữa, điều chỉnh một số hư hỏng
của thiết bị điều khiển.... Đến nay, hệ thống thiết bị trên đã được triển khai ứng
dụng khá thành công cả về kỹ thuật và hiệu quả phổ biến. Kỹ thuật san phẳng laser
không những được chuyển giao ứng dụng thành công tại một số địa phương ở Việt
Nam như Bạc liêu (năm 2005, 12 ha; năm 2006 ÷ 2008, 20 ha); An Giang (năm
2006, 50 ha + 100 ha do nông dân mượn bộ phát laser), Lâm Đồng (28,6 ha năm
2008)..., mà còn được chuyển giao sang cho Trung tâm nghiên cứu giống Thasano,
tỉnh Savanakhet, Lào.
Qua quá trình ứng dụng thử nghiệm thiết bị san phẳng laser đã có được những
kết quả rất khả quan. Tuy nhiên giá đầu tư thiết bị và chi phí thi công là mối băn
khoăn chính hiện nay, phải cần tổ chức thi công với diện tích tương đối tập trung,
chưa chủ động, còn gặp nhiều khó khăn trong khâu vận chuyển, sửa chữa và bảo trì
do các thiết bị đều phải ngoại nhập. So với các thiết bị san phẳng thông thường, giá
thành của san phẳng laser còn cao (1,5 triệu đến 8 triệu đồng/ha) tùy thuộc vào địa
hình. Do đó, việc nghiên cứu nội địa hoá cụm thiết bị điều khiển của hệ thống là cần
thiết và cấp bách nhằm hạ giá thành, chủ động về thiết bị và giảm chi phí sửa chữa,
bảo hành, đóng góp vào sự phát triển của san phẳng laser nói riêng và Nông nghiệp
Việt Nam nói chung.
Trên cơ sở đó, được sự hỗ trợ của Trung tâm Năng lượng và Máy Nông
nghiệp, Trường Đại học Nông Lâm Tp.HCM và một phần kinh phí của Công ty Cổ
2
phần Nông nghiệp Lý Tưởng, chúng tôi đề xuất thực hiện đề tài: “Nghiên cứu giải
pháp thiết bị điều khiển tự động hệ thống san phẳng mặt đồng ứng dụng công nghệ
laser và mô phỏng bề mặt san phẳng ”.
1.2 Mục tiêu đề tài
Nghiên cứu, thiết kế, chế tạo và thử nghiệm một số bộ phận của cụm thiết bị
điều khiển (bao gồm cụm van thủy lực và bộ điều khiển tự động) của hệ thống, góp
phần nội địa hoá hệ thống, giảm giá thành thiết bị, đồng thời cải tiến phù hợp với
điều kiện làm việc ở Việt Nam.
Nghiên cứu, xây dựng chương trình tính toán, mô phỏng qui trình làm việc của
hệ thống và chi phí nhiên liệu phụ thuộc vào thực trạng bề mặt đồng (sau khi cày)
với mục đích tăng hiệu quả làm việc của hệ thống.
1.3 Phạm vi nghiên cứu
Thừa kế từ kết quả cải tiến cụm van thủy lực của Nguyễn Văn Hùng (2008):
cụm van 4/3 thay cho cụm van 3/2 (khái niệm và định nghĩa của van 4/3 và van 3/2
được trình bày ở mục 2.2.2.1) của hệ thống ngoại nhập. Tính toán và thiết kế hoàn
thiện cho các bộ phận của hệ thống thủy lực.
Nghiên cứu thiết kế, chế tạo và thử nghiệm bộ điều khiển PLC thay cho bộ
điều khiển ngoại nhập.
Viết chương trình mô phỏng bề mặt đồng và tính toán ước lượng chi phí cho
quá trình san phẳng.
3
Chương 2
TỔNG QUAN
2.1 Đối tượng nghiên cứu
2.1.1 Cấu tạo và nguyên lý hoạt động của hệ thống san phẳng laser
Sơ đồ nguyên lý của hệ thống san phẳng laser được thể hiện như hình 2.1 và hệ
thống thực được thể hiện như hình 2.2
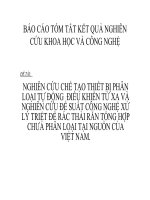
Hình 2.1 Sơ đồ nguyên lý hệ thống máy san phẳng laser
1. Máy phát laser;
6. Ống dầu thủy lực;
2. Xi lanh thủy lực;
7. Van thủy lực;
3. Thiết bị nhận tín hiệu;
8. Hộp điều khiển;
4. Gàu san;
9. Máy kéo.
5. Bộ phận làm mát dầu thủy lực;
Nguyên lý hoạt động của hệ thống như sau:
4
Bộ phát laser (1) được đặt trên giá đỡ, phát ra tia laser tạo thành một mặt
phẳng laser cố định song song nằm ngang. Bộ nhận tín hiệu laser (3) lắp cố định
trên cụm gàu san (4) sẽ xác định vị trí tương đối của gàu san so với mặt phẳng laser
khi hai bánh xe mang gàu san lên vùng cao hay xuống vùng đất trũng rồi truyền tín
hiệu về bộ điều khiển (8). Sau khi xử lý, tín hiệu được truyền tới hộp phân phối
thủy lực để kích đóng hoặc mở các vị trí của van thủy lực (7) lúc này dầu được đưa
từ bơm qua các đường ống dẫn (6) đến điều khiển cơ cấu chấp hành (xi lanh thủy
lực 2). Dầu trả về thùng được làm mát qua bộ phận làm mát dầu (5). Nghĩa là khi
cụm gàu san lên vùng đất cao thì bộ phận điều khiển sẽ điều khiển cho xi lanh thủy
lực đi xuống làm hạ gàu san để lấy đất, khi cụm gàu san xuống vùng đất thấp thì
điều khiển cho xi lanh thủy lực sẽ đẩy lên, gàu san được nâng lên để thả đất. Gàu
san được nâng lên hoặc hạ xuống sao cho vạch chuẩn trên bộ nhận (được cài đặt
sẵn) luôn nằm trên mặt phẳng laser.
Máy kéo
Bộ điều khiển
Bộ nhận laser
Bộ phát laser
Hệ thống
thủy lực
Gàu san
Hình 2.2 Hệ thống san phẳng laser lắp trên máy kéo MTZ 80
5