TỔNG HỢP HỆ THỐNG TỰ ĐỘNG ĐIỀU CHỈNH TỐC ĐỘ THEO SƠ ĐỒ HỆ THYRISTORĐỘNG CƠ MỘT CHIỀU VỚI HAI VÒNG ĐIỀU KHIỂN MÔ MEN VÀ TỐC ĐỘ
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (432.57 KB, 27 trang )
HHhH
HỌC VIỆN KỸ THUẬT QUÂN SỰ
KHOA KỸ THUẬT ĐIỀU KHIỂN
BỘ MÔN KỸ THUẬT ĐIỆN
CHUYÊN ĐỀ
“TỔNG HỢP HỆ THỐNG TỰ ĐỘNG ĐIỀU CHỈNH TỐC ĐỘ THEO SƠ
ĐỒ HỆ THYRISTOR-ĐỘNG CƠ MỘT CHIỀU VỚI HAI VÒNG ĐIỀU
KHIỂN MÔ MEN VÀ TỐC ĐỘ”.
Giảng Viên: PHẠM TUẤN THÀNH
Học viên:
Lớp: Cao học tự động hóa
Hà nội, tháng 02 năm 2012
1
2
HỌC VIÊN:
LỚP CAO HỌC:
2
CHUYÊN ĐỀ TRUYỀN ĐỘNG ĐIỆN
HỌC VIỆN KTQS
3
HỌC VIÊN:
LỚP CAO HỌC:
TỔNG HỢP HỆ THỐNG TỰ ĐỘNG ĐIỀU CHỈNH TỐC ĐỘ
THEO SƠ ĐỒ HỆ THYRISTOR - ĐỘNG CƠ MỘT CHIỀU
VỚI HAI VÒNG ĐIỀU KHIỂN MÔMEN VÀ TỐC ĐỘ
1. Tính toán thông số của vòng điều chỉnh mômen và đánh giá độ
chính xác điều chỉnh mômen.
Số liệu động cơ:Phương án 8
- Kiểu động cơ: Một chiều kiểu vỏ bảo vệ, kích từ độc lập.
- Công suất động cơ định mức Pdm
:8 kW
- Tốc độ động cơ định mức ndm
1500 vòng/ phút
- Dòng điện định mức
- Điện trở phần ứng
I udm
: 86 A
Rudc
: 0,0656 Ω
- Mô men quán tính J
: 0,1 Kg.m2
- Số đôi cực (2p)
: 4 (p =2)
- Bội số cho phép của dòng khởi động λI : 2,3
Bộ biến đổi
Điện áp ra
U dm
: 110 V; Điện áp điều khiển
U dkdm
:
10 V.
Bội số quá tải ngắn hạn cho phép theo dòng điện
Điện trở tương đương mạch lực của bộ biến đổi
Hằng số thời gian của bộ biến đổi
Các tham số khác
Tbd
KI
:
R∑ bd
:
1,2
0,06 Ω
: 0,01s
Mô men quán tính quy đổi về trục động cơ
J qd
= 1,5
J dc
Lu = c
30U
3,14 pnI
Điện cảm mạch phần ứng xác định theo công thức
= 0,6; 2p là số đôi cực, U, n, I lấy theo giá trị định mức của động cơ).
(với c
3
CHUYÊN ĐỀ TRUYỀN ĐỘNG ĐIỆN
HỌC VIỆN KTQS
4
HỌC VIÊN:
LỚP CAO HỌC:
Trong mạch phần ứng mắc điện trở sơn (shunt) loại 75 mV với
I dm
Is
= 1,5
.
K dI
Hệ số đát trích dòng
= 100.
2. Vòng điều chỉnh tốc độ chỉnh định theo tiêu chuẩn tối ưu đối
xứng.
Tốc độ không tải lí tưởng cực đại tương ứng với điện áp đặt tốc độ
U dmax
=10V. Hệ số sức điện động (SĐĐ) máy phát tốc
Gia tốc tính toán
Mô men tải
ε0
1
= 100
M e = M dm
s2
K mf
= 0,6 Vs;
;
.
Yêu cầu
Tính toán thông số của vòng điều chỉnh mômen và đánh giá độ chính
xác điều chỉnh mô men.
Tổng hợp vòng điều chỉnh tốc độ chỉnh định theo tiêu chuẩn tối ưu đối
xứng
4
CHUYÊN ĐỀ TRUYỀN ĐỘNG ĐIỆN
HỌC VIỆN KTQS
5
HỌC VIÊN:
LỚP CAO HỌC:
Khảo sát động học của hệ thống bằng phương pháp giải tích và mô
phỏng nghiên cứu ảnh hưởng của sự thay đổi đột biến của tải đến chất lượng
hệ thống.
5
CHUYÊN ĐỀ TRUYỀN ĐỘNG ĐIỆN
HỌC VIỆN KTQS
6
HỌC VIÊN:
LỚP CAO HỌC:
NỘI DUNG CHÍNH
1. TÍNH TOÁN THÔNG SỐ VÒNG ĐIỀU CHỈNH MÔMEN
1.1. Tính toán thông số vòng điều chỉnh mômen
Φ = Φ dm
M = CI u
Khi
đối với động cơ một chiều kích từ độc lập ta có:
(Mô men tỉ lệ với dòng điện). Để điều chỉnh mômen cần có phản hồi âm cứng
theo dòng điện. Sơ đồ khối của hệ thống và sơ đồ cấu trúc cho trên các hình
vẽ 1.1 và 1.2).
R1
Rv1
ω
Rph1
C1
C2
R2
Rv2
Bộ điều chỉnh tốc độ
~
Bộ điều chỉnh dòng điện
Bộ biến đổi Thyristor
ĐC
Rph2
Phản hồi dòng điện
FT
Rs
Hình 1.1. Sơ đồ khối của hệ thống
6
CHUYÊN ĐỀ TRUYỀN ĐỘNG ĐIỆN
HỌC VIỆN KTQS
7
HỌC VIÊN:
LỚP CAO HỌC:
C
UdI
Wω
WI
kb e −τ b p
TΦ p + 1
1/ RuΣ iu
Tu p + 1
RuΣ
CTM p
Ic
ki
kω
Hình 1.2. Sơ đồ cấu trúc của hệ thống
Ở đây ta bỏ qua mối liên hệ bên trong của Sđđ động cơ (phản hồi qua
C); hằng số thời gian của bộ biến đổi được đánh giá qua độ giữ chậm
quán tính của bộ lọc và bộ biến đổi xung pha điều khiển thyristor
TΦ
τb
và
. Ta coi
Tµ = τ + TΦ
đây là hằng số thời gian không bù của vòng điều chỉnh:
. Khi điều
chỉnh mômen hệ truyền động điện ta coi mối liên hệ phản hồi bên trong của
Sđđ động cơ là nhiễu, nó làm giảm độ chính xác điều chỉnh. Trong hệ thống
điều chỉnh tốc độ, khi xét vòng điều chỉnh mômen, tổng hợp theo tiêu chuẩn
tối ưu môđun với hàm truyền vòng hở có khâu tích phân thì sai số tĩnh theo
mômen được loại trừ. Khi tổng hợp vòng điều chỉnh mômen ta ngắt vòng
phản hồi sđđ này. Ảnh hưởng của nó đến độ chính xác động học được đánh
giá thêm bằng cách đặt vào một tác động nhiễu
ω = f (t )
.
7
CHUYÊN ĐỀ TRUYỀN ĐỘNG ĐIỆN
HỌC VIỆN KTQS
8
HỌC VIÊN:
LỚP CAO HỌC:
Uy
WI
-
UdI
kb
Tµ p + 1
ebd
1/ RuΣ
Tu p + 1
I
ki
Hình 1.3. Sơ đồ cấu trúc với vòng điều chỉnh dòng điện
Ta xác định các thông số cơ bản của sơ đồ:
- Hệ số khuếch đại của bộ biến đổi:
Kb =
U dm 110
=
= 11
U dkdm 10
- Điện trở tổng mạch phần ứng:
Ω
Ru∑ = Ru = 1,1.(Rudc + Rbd) = 1,1.(0,0656+0,06) = 0,138 ( )
(Hệ số 1,1 tính đến điện trở dây dẫn).
Tµ = τ + TΦ
- Hằng số thời gian:
lấy bằng hằng số thời gian của bộ biến đổi:
Tµ = Tbd = 0,01 (s).
- Hằng số thời gian phần ứng:
Điện cảm phần ứng:
Lu = c
Tu =
30U
3,14 pnI
Lu
Ru
0,6 *
=
30 * 110
3,14 * 2 * 1500 * 86
= 0,00244 (H)
= = 0.0177 (s)
C=
U dm − I dm Rudc
ω dm
- Hằng số điện cơ của động cơ:
Thay số vào ta có:
C =*60 =0.664(VS)
ω=
với
ndm
2π
60
- Hằng số thời gian điện cơ:
TM =
= = = =0.046 (s)
8
CHUYÊN ĐỀ TRUYỀN ĐỘNG ĐIỆN
HỌC VIỆN KTQS
9
HỌC VIÊN:
LỚP CAO HỌC:
Để có hệ số phản hồi bằng 1, ta biến đổi sơ đồ cấu trúc bằng cách đưa
khâu KI lên phía trước.
Ud
K bd
Tbdp+ 1
Wđkd
-
1/ RuΣ
Tu p + 1
1
KI
KI
H×nh 1.4. S¬ ®å cÊu tróc cña vßng ®iÒu chØnh
Chỉnh định vòng điều chỉnh mômen theo tiêu chuẩn tối ưu Modul.
Để điều chỉnh mômen cần có phản hồi âm cứng theo dòng điện.
+ Hàm truyền mong muốn hệ hở là:
WH 1 =
1
2Tµ P(Tµ P + 1)
+ Hàm truyền của đối tượng điều chỉnh:
Wo1 =
K I Kb
RuΣ (Tµ P + 1)(Tu P + 1)
+ Hàm truyền của bộ điều chỉnh:
WI =
TI =
WH 1 Tu p + 1
=
WoI
TI P
K I Kb
2Tµ
RuΣ
Trong đó
là hằng số tích phân của bộ điều chỉnh PI.
Ta xác định các thông số của bộ điều chỉnh.
R 2 ,C2
- Xét hằng số thời gian mạch phản hồi bộ điều chỉnh (
Lấy Tk = TI = = =1.913
Chọn trước R2 = 4,7KΩ ta tính được C2 = Tk/R2 = 407 μF
):
Tk = R2C2
9
CHUYÊN ĐỀ TRUYỀN ĐỘNG ĐIỆN
HỌC VIỆN KTQS
10
HỌC VIÊN:
LỚP CAO HỌC:
- Giá trị hệ số khuếch đại phản hồi
K I = K s K dI
Rv 2
R ph 2
Trong đó
Ks =
Lấy
Ks
qui về đầu vào ta có:
là hệ số biến đổi của điện trở sơn đối với dòng.
Us
0,075
=
= 0,000581(V / A)
I s 1,5 * 86
Rv 2 = R ph 2 ; K dI = 100
TI =
KI
ta tính được KI = 0,000581*100*1 = 0,0581
K I Kb
2Tµ
R uΣ
= *2*0.01 =1.913 (s)
- Xác định hệ số khuếch đại bộ điều chỉnh:
Ky =
R2 Tu
=
Rv 2 TI
= =0.00925
Vì vậy tính được Rv2 = = = 491.7 (KΩ)
- Dòng điện ngắn mạch (khởi động):
Inm = λI.Iđm = 2,5*86 = 215 (A)
- Điện áp cực đại tương ứng đưa đến bộ điều chỉnh dòng:
Uđkmax = KI.Inm = 0.0581*215= 12.49 (V)
- Mômen điện từ ngắn mạch: Mnm = C.Inm = 0.664*215 =142.76 (N.m)
1.2. Đánh giá độ chính xác điều chỉnh mô men
Để phân tích độ chính xác điều chỉnh mômen ta sử dụng công thức
chung tính sai số của bộ điều chỉnh và sơ đồ cấu trúc của bộ điều chỉnh
mômen.
10
CHUYÊN ĐỀ TRUYỀN ĐỘNG ĐIỆN
HỌC VIỆN KTQS
11
HỌC VIÊN:
LỚP CAO HỌC:
UVM
WPM
kβ '
Uy
Tβ ' p + 1
UOM
ω
ω0
βc
Tl p + 1
M
KM
Hình 1.5. Sơ đồ cấu trúc của bộ điều chỉnh mômen
∆M Σ ( p ) =
Sai số được tính là
Với
M V ( p ) + ω ( p ).Wω M ( p )
1 + WH ( p )
WωM
=
βc
Tl p + 1
[ M V ( p) + βcω ( p) /(Tl p + 1) ] − aM TM p(Tµ p + 1)
aM TM p (Tµ p + 1)
∆M Σ ( p )
Vậy ta có
=
Từ biểu thức trên ta thấy sai số tĩnh của điều chỉnh mômen cả theo tác
động điều khiển và cả theo nhiễu ω(t) đều bằng không (vì p = 0).
Sai số động cân bằng khi mômen thay đổi tuyến tính theo thời gian
dM
M (t ) =
÷ .t
dt Max
suy ra
Xác định theo công thức ta có:
1
dM
M ( p) =
÷ .
dt Max p
dM
∆M ω ( i ) (0) =
÷ aM TM
dt Max
(thay p = 0)
Ta tiến hành phân tích ảnh hưởng của phản hồi bên trong theo tốc độ
(sđđ) đến độ chính xác điều chỉnh mômen trong quá trình quá độ truyền động
điện. Giả thiết rằng tốc độ động cơ thay đổi tuyến tính:
11
CHUYÊN ĐỀ TRUYỀN ĐỘNG ĐIỆN
HỌC VIỆN KTQS
12
HỌC VIÊN:
LỚP CAO HỌC:
ω (t ) ε max .t
=
Thay
ω ( p)
ω ( p ) ε max / p
suy ra
=
vào a sẽ có sai số:
∆M ω (i ) (0)
=
β c aM TM ε max
ω (t )
Theo công thức này thì trong quá trình quá độ do
thay đổi, do liên
hệ phản hồi bên trong theo Sđđ động cơ nên giá trị của mômen có thể khác
nhiều so với giá trị đặt. Như vậy giá trị đặc tính động và đặc tính tĩnh M = f(t)
có sự khác biệt lớn. Với cùng một gia tốc ξ max thì khi đặc tính cơ càng cứng
(β) sai khác nêu trên càng lớn. Hằng số thời gian bù T μ = TM cũng có ảnh
hưởng tương tự.
Sự tồn tại của sai số có thể giải thích như sau: Trong quá trình điều
chỉnh để giữ cho mômen không đổi (M = const) thì khi thay đổi tốc độ ω tăng
cần phải tăng tốc độ ω0 mà tốc độ không tải lý tưởng phụ thuộc vào điện áp vì
thế cần tăng điện áp nói cách khác là cần tăng tuyến tính điện áp ra của bộ
điều chỉnh mômen. Muốn vậy trên đầu vào của bộ điều chỉnh PI của mômen
∆UV = U dM − kM .M
cần phải duy trì một sai lệch:
Để đưa ra công thức thuận tiện để đánh giá sai số động trong quá trình
quá độ khởi động và hãm ta dựa vào công thức tính gia tốc:
ε max
=
M nm − ∆M u − M c
JΣ
với
(
JΣ
=
J qd
= 1,5Jdc)
∆M ω (1 − M c M nm )
=
M nm
(1 + TM aTµ )
Thay vào ta được:
Công thức này là công thức cơ bản thuận tiện để đánh giá đặc tính và
định lượng quá trình quá độ khi điều chỉnh mômen .
Với vòng điều chỉnh mômen được chỉnh định theo tiêu chuẩn tối ưu
modul, khi cho mômen thay đổi nhảy bậc M v = Mnm quá trình quá độ khi thay
đổi mômen M= f(t) cho ở hình 1.6.
12
CHUYÊN ĐỀ TRUYỀN ĐỘNG ĐIỆN
HỌC VIỆN KTQS
13
HỌC VIÊN:
LỚP CAO HỌC:
Đường cong 1 mô tả chính xác quá trình thay đổi mômen khi ω = 0
(rôto động cơ bị hãm cứng). Khi có mômen đặt vào trục động cơ thì tốc độ
M − M c = JΣ
dω
dt
thay đổi theo phương trình:
Sự thay đổi tốc độ gây ra sự khác biệt của đường cong 2 so với đường
cong 1. Tốc độ càng lớn sự khác biệt càng lớn.
Đường cong 3 biểu diễn sự thay đổi tốc độ khi khởi động không tải
(Mc= 0).
M
Mnm
∆M ω
Mc
1
2
3
ωbd
t
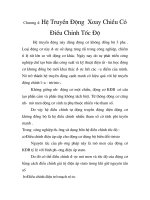
Hình 1.6. Đặc tính quá độ khi thay đổi mômen
Ta thấy trong giai đoạn quá độ ban đầu tốc độ biến thiên không tuyến
tính. Sau khi đạt giá trị ωbđ tốc độ biến thiên tuyến tính theo quy luật:
ω = ωbđ + ξmax .t
Sai số cân bằng do tốc độ gây ra đối với mômen ΔMω xác định theo:
∆M ω (1 − M c M nm )
=
M nm
(1 + TM aTµ )
Đặc tính thay đổi của mômen ở giai đoạn đầu đường cong 2 không
khác nhiều đường cong lý thuyết 1(ω = 0). Sai khác này không đáng kể và
13
CHUYÊN ĐỀ TRUYỀN ĐỘNG ĐIỆN
HỌC VIỆN KTQS
14
HC VIấN:
LP CAO HC:
nh hng n c tớnh chung v thi gian quỏ . Vỡ vy ng cong 2 cú
M = M nm M
Tà
th xõy dng theo ng cong 1:
sau khi t = 4,7
Ta tớnh c sai s tng i ca quỏ trỡnh iu chnh mụmen v dũng
in khi khi ng khụng ti (Mc = 0)
= = =0.078
Sai s tuyt i theo dũng in l: I =
0,078.Inm =
0,078*215 = 16.77 (A)
2. TNH TON THễNG S VềNG IU CHNH TC
S cu trỳc h thng vi 2 vũng iu chnh mụmen v tc :
U d
WU dM 1/ kM (4Tà P + 1)
8K I Tà2 P 2 + 4Tà P + 1
M
1
cTM p
Mc
k ph
Hỡnh 2.1. S cu trỳc vũng iu khin mụmen v tc
Đối tợng điều chỉnh của vòng điều chỉnh tốc độ gồm vòng
kín điều chỉnh mômen và khâu cơ học truyền động điện:
1/ k M (4Tà P + 1)
1
8K T P + 4Tà P + 1 cTM P
W0 =
2
I à
2
.
Hàm truyền mong muốn mạch hở
WH 2 =
1/ k (4Tà P + 1)
8Tà2 P 2 (Tà P + 1)
Hàm số truyền của bộ điều chỉnh
W =
WH 2 k M c TM (4Tà P + 1) P TM
TM
=
=
+
2 2
W0
TS 4TS Tà P
k 8Tà P (Tà P + 1)
Đây là bộ điều chỉnh tỉ lệ tớch phõn. Ta có:
- Hệ số truyền mômen
KM = = =0.0875
14
CHUYấN TRUYN NG IN
HC VIN KTQS
15
HC VIấN:
LP CAO HC:
- Độ cứng theo mômen
c = = =3.194 (Nmc)
- Hệ số truyền tốc độ
K = = =0.001325 (Vc)
- Hằng số thời gian điện cơ
TM
= 0.046 (s)
- Hng s tớch phõn ca b iu chnh PI.
Ts = = = 0.0000948 (s)
W = 6, 25 +
Vy :
1
0, 0064.P
Thay vào ta có:
Kp== =44.10
- Cho điện trở phản hồi mạch điều chỉnh tốc độ tỉ lệ
R1 = 27k, ta xác định đợc điện trở vào kênh đặt tốc độ:
RV1 = = =0.612 (K)
C1 = == 0.035 (f)
Sc in ng mỏy phỏt tc khi =0dm = = 157 (rad/s)
l:
Eft = Kmf.0dm = 0,6*157 = 94.2 (V)
* Tính điện trở vào kênh phản hồi
R ph1
Rph1 = Rv1.Eft/Udmax =0.612*94.2/10 = 5.76 k
2.1. Tính toán đặc tính cơ điện
Ud
W
U dI
1/ kM (4Tà P + 1)
8 K I Tà2 P 2 + 4Tà P + 1
M
1
cTM p
Mc
k 0
Hình 2.2. Sơ đồ mạch vòng tốc độ
15
CHUYấN TRUYN NG IN
HC VIN KTQS
16
HC VIấN:
LP CAO HC:
Ta có phơng trình
1/ k M (4Tà P + 1)
M
=
U dI 8 K I Tà2 P 2 + 4Tà P + 1
U dI = (U d k0 . )W
p2
Bỏ qua số hạng
ta thu đợc
Phơng trình đặc tính cơ tĩnh (p = 0) là
=
4Tà
Ud
M
k
cTM
Phơng trình này đúng trong giới hạn thay đổi tuyến
tính
của
đặc
( U dI k0 ) k p < U d Im ax
tính
Khi
) cực đại khi
điều
chỉnh
tốc
độ
khi
.
= gh = 0 max
bộ
< gh
M nm
k
điện áp ra bộ điều chỉnh tốc độ (
thì M = Mnm = const.
Vậy khi I < Inm = 215 (A) phơng trình đặc tính cơ
điện là:
=
U d 4 * Tà
Iu
K c TM
=
- *IU = 0.146*Ud -0.000053*IU
Khi Ud=Udmax=12,49 (V):
= 0.146*12.49 0.000053*215 = 1.812 (rad/s)
0max =0.146*12.49 =0.911 (rad/s)
Khi Ud=0,5Udmax=6.245 (V):
= 0.146*6.245 0.000053*215 =0.9003 (rad/s)
Độ cứng của đặc tính cơ:
K = = = 3.673 (Nms)
16
CHUYấN TRUYN NG IN
HC VIN KTQS
17
HC VIấN:
LP CAO HC:
Emax
0max
gh
Ud=6,2438
Inm
I
Hình 2.3. Biểu đồ đặc
tính cơ
- Khi
= gh ; I u = I nm
thì
k = 0
- Còn khi bộ biến đổi tơng ứng
Eb = Emax = Cgh + I u Ru =
= gh ; I 0 = I nm
thì sđđ:
0.644*0.911+215*0.138
=
30.27 (V)
Đặc tính cơ điện tơng ứng với
Eb = Emax
= - *IU = - *IU = 20.09 -0.09*IU
2.2. Xác định sai số
d =
Từ biểu thức
với
Ud
k 0
ta thấy môđun độ cứng đặc
tính cơ hệ điều chỉnh kín theo tốc độ đợc xác định bởi
thông số động học
TM ; Tà
k =
;(
c .TM
4Tà
)
17
CHUYấN TRUYN NG IN
HC VIN KTQS
18
HC VIấN:
LP CAO HC:
Độ chính xác điều chỉnh khi các thông số phần cơ khác
nhau (
TM
) là khác nhau rất nhiều.
- Nếu hệ truyền động điện có quán tính cơ lớn
TM > 4Tà
thì môđun độ cứng đặc tính cơ hệ kín lớn hơn hệ hở
k > c
Khi
TM = 4Tà
thì
k = c
- Với hệ truyền động điện có công suất lớn và mômen
quán tính nhỏ (
TM < 4Tà
Theo biểu thức
d
) thì
k < c
M = K ( d )
K
ta có sơ đồ cấu trúc
M
1
cTM p
Mc
Hình 2.4. Sơ đồ cấu trúc vòng điều
k
M ( p)
=
( p ) 2Tà + 1
Ta có
Ta định nghĩa độ cứng động của đặc tính cơ hệ
kín nh sau:
dk =
k
2Tà + 1
=
c .TM
4Tà ( 2Tà p + 1)
Đặc tính tần số loga của đặc tính cơ động:
18
CHUYấN TRUYN NG IN
HC VIN KTQS
19
HC VIấN:
LP CAO HC:
L
TM > 4Tà
TM = 4Tà
TM < 4Tà
1
1
2Tà
1
Tl
Trên hình vẽ đặc tính tần số lôga với các giá trị
TM / 4Tà
khác nhau. Đờng 1 trên hình là đặc tính của hệ hở. Từ sơ
đồ cấu trúc ta tính sai lệch theo tác động điều chỉnh.
k ( p ) =
WH (
dk ( p )
1 + WH ( p )
k
1
p ) = 2Tà p + 1 cTM p
.
k ( p ) = dk ( p ) .
=
cTM
1
1
.
=
4Tà (2Tà p + 1) cTM p 4Tà p(2Tà p + 1)
4Tà p ( 2Tà p + 1)
4Tà p ( 2Tà p + 1) + 1
Trong biểu thức trên khi p = 0, nếu
dk =
const, thì sai số
tĩnh theo tác động điều khiển bằng 0. Hệ số bậc phiếm
tĩnh bằng 1.
Nếu tác động điều khiển tăng theo quy luật tuyến
tính:
19
CHUYấN TRUYN NG IN
HC VIN KTQS
20
HC VIấN:
dk = t
LP CAO HC:
hay
dk ( p ) = p
Trong chế độ cân bằng sẽ có sai số không đổi thay p =
0 biểu thức
k ( p ) = dk ( p ) .
4Tà p ( 2Tà p + 1)
4Tà p ( 2Tà p + 1) + 1
=
4Tà p ( 2Tà p + 1)
.
p 4Tà p ( 2Tà p + 1) + 1
k = 4Tà
Sai lệch theo tác động của mômen nhiễu tải
k (
'
Khi
Mc =
4Tà p ( 2Tà p + 1)
Mc ( p) = M ( p) .
c
p) =
cTM 4Tà p ( 2Tà p + 1) + 1
1 + WH ( p )
(
)
const, thay p = 0 ta đợc biểu thức sai số tĩnh
theo mô men tải.
k' =
M c 4Tà M c
.
=
c TM k
Vậy trong quá trình quá độ khi lợng vào thay đổi theo
quy luật tuyến tính thì sai số động cân bằng tổng cộng là
k = k +
'
k
=
k = 4Tà 0
+
M c 4Tà
.
c TM
Thay số ta có:
MC =Mdm = = = 50.95 (Nm)
2,8.4.0, 01
= 4,85
k = 4 *0, 01*100 + 2, 623.0, 05
(1/s)
- Giá trị cân bằng dòng điện phần ứng khi
= 0t
Ic = = =76.73 (A)
I =IC + *0 =76.73+*100 =135.98 (A)
20
CHUYấN TRUYN NG IN
HC VIN KTQS
21
HC VIấN:
LP CAO HC:
- Thời gian điều chỉnh (đại lợng điều chỉnh là tốc độ
lần đầu đạt giá trị cân bằng):
tp = 16,5*t = 16,5*2t = 33*0,01 = 0,33 (s) < 0,9
(s)
3. XY DNG Mễ HèNH Mễ PHNG TRấN SIMULINK KHO ST
NH HNG CA TI N CHT LNG H THNG
Theo cỏc tớnh toỏn trờn, ta cú s cu trỳc ca h thng:
21
CHUYấN TRUYN NG IN
HC VIN KTQS
22
HỌC VIÊN:
LỚP CAO HỌC:
C
U
UdI
WI
Wω
K bd
Tbd p + 1
1/ RuΣ iu
Tu p + 1
RuΣ
CTM p
Ic
ki
kω
Hình 3.1. Sơ đồ cấu trúc của hệ thống
Trong đó:
6, 25 +
Wω =
WI =
1
0, 0064.s
0, 0266.s + 1
0, 0695.s
Wbd =
Wdc =
11
0,01.s + 1
1, 71
0, 0266.s + 1
KI = 1,2
kω = 0.001325
C = 0.664
Ru
0,5852
9, 45
=
=
C.TM .s 1, 239.0, 05s
s
22
CHUYÊN ĐỀ TRUYỀN ĐỘNG ĐIỆN
HỌC VIỆN KTQS
23
HỌC VIÊN:
LỚP CAO HỌC:
Từ đó ta xây dựng được sơ đồ mô phỏng trên Simulink:
Để khảo sát, ta sử dụng 3 khối Scope hiển thị tốc độ, dòng
điện phần ứng và mômen tải.
Ta sử dụng 3 khối Mc (Step) để tạo mô hình tải thay đổi đột biến.
Đồ thị mômen tải như sau:
23
CHUYÊN ĐỀ TRUYỀN ĐỘNG ĐIỆN
HỌC VIỆN KTQS
24
HỌC VIÊN:
LỚP CAO HỌC:
Dòng điện phần ứng động cơ:
Ta nhận được đồ thị tốc độ như sau (khi không có tải):
24
CHUYÊN ĐỀ TRUYỀN ĐỘNG ĐIỆN
HỌC VIỆN KTQS
25
HỌC VIÊN:
LỚP CAO HỌC:
Quan sát sự thay đổi tốc độ khi có đột biến tải:
25
CHUYÊN ĐỀ TRUYỀN ĐỘNG ĐIỆN
HỌC VIỆN KTQS