THIẾT KẾ CHẾ TẠO ROBOT LEO TƯỜNG ỨNG DỤNG TRONG KIỂM TRA BẢO TRÌ NHÀ CAO TẦNG
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (8.14 MB, 80 trang )
BỘ GIÁO DỤC VÀ ĐÀO TẠO
TRƯỜNG ĐẠI HỌC NÔNG LÂM THÀNH PHỐ HỒ CHÍ MINH
KHÓA LUẬN TỐT NGHIỆP
THIẾT KẾ CHẾ TẠO ROBOT LEO TƯỜNG
ỨNG DỤNG TRONG KIỂM TRA
BẢO TRÌ NHÀ CAO TẦNG
Họ và tên sinh viên:
TRẦN DƯƠNG HOAN
CHÂU KHÁNH ĐẠT
Ngành: CƠ ĐIỆN TỬ
Niên khóa: 2014-2018
Tháng 06/2018
THIẾT KẾ CHẾ TẠO ROBOT LEO TƯỜNG
ỨNG DỤNG TRONG BẢO TRÌ NHÀ CAO TẦNG
Tác giả
TRẦN DƯƠNG HOAN
CHÂU KHÁNH ĐẠT
Khóa luận được đệ trình để đáp ứng yêu cầu
Cấp bằng Kỹ sư ngành
Cơ điện tử
Giáo viên hướng dẫn:
(Đã ký)
TH.S NGUYỄN TẤN PHÚC
Tháng 06 năm 2018
i
LỜI CẢM ƠN
Sau một thời gian dài 6 tháng, hôm nay là một ngày: viết lời cảm ơn này là kết
thúc khóa luận của chúng em. Đây là giai đoạn học tập mãnh mẽ đối với chúng em,
không chỉ ở khoa học mà còn ở mức độ cá nhân. Quá trình viết luận văn này đã có một
tác động lớn đến chúng em. Chúng em suy nghĩ về những người đã ủng hộ và giúp đỡ
chúng em rất nhiều trong suốt thời kỳ này.
Trước tiên chúng em đặc biệt muốn chỉ ra người giám sát, người dẫn lối chúng
em trong chặng đường vừa qua là Th.S Nguyễn Tấn Phúc – Giảng viên hướng dẫn
khóa luận của chúng em. Chúng em cảm ơn sâu sắc với thầy, người đã giúp chúng em
có cơ hội được tiếp tục nghiên cứu một mảng đề tài thú vị và đầy ứng dụng tại khoa
Cơ khí – Công nghệ, trường đại học Nông Lâm TP. HCM, thầy cùng những hướng dẫn
có giá trị của thầy đã giúp cho chúng em hoàn thành tốt khóa luận này.
Ngoài ra chúng em muốn gửi lời cảm ơn đến toàn thể thầy cô, và những cán bộ
công tác tại khoa Cơ khí – Công nghệ, trường đại học Nông Lâm TP. HCM đã luôn tạo
điều kiện thuận lợi cho chúng em trong quá trình viết khóa luận, chỉ ra những thiếu sót
cần bổ sung và những ý kiến đóng góp bổ ích.
Chúng em cũng muốn cảm ơn gia đình, một hậu phương vững chắc với những lời
khuyên bổ ích của họ. Và đồng cảm ơn đến các bạn, các anh chị đang học tập và
nghiên cứu tại khoa Cơ khí – Công nghệ trường đại học Nông Lâm TP. HCM cho sự
hỗ trợ tuyệt vời của các bạn, các anh chị. Mọi người đã sẵn sàng giúp đỡ và đồng hành
cùng chúng em rất nhiều trong suốt thời gian hoàn thành khóa luận.
Tuy vậy, trong thời gian tiếp theo chúng em vẫn mong nhận được những đóng
góp từ những sai sót còn mắc phải trong báo cáo này.
Chân thành cảm ơn đến các tất cả mọi người!
Thủ Đức, 12 tháng 07, năm 2018
(Đã ký)
TRẦN DƯƠNG HOAN
ii
(Đã ký)
CHÂU KHÁNH ĐẠT
TÓM TẮT
Đề tài nghiên cứu “Thiết kế chế tạo Robot leo tường ứng dụng trong bảo trì nhà
cao tầng” được tiến hành tại khoa Cơ khí – Công nghệ, trường đại học Nông Lâm
thành phố Hồ Chí Minh, thời gian từ tháng 1 năm 2018 đến tháng 6 năm 2018. Khóa
luận đề cập đến thiết kế của mô hình robot bao gồm các thiết kế ban đầu và phát triển,
chế tạo mô hình thực tế với bộ điều khiển không dây cầm tay. Sử dụng camera để
truyền hình ảnh về máy tính, nhằm đánh giá các lỗi khe hở, nứt, sơn rêu mốc trong
công tác bảo trì, bảo dưỡng các tòa nhà cao tầng, thiết kế giao diện nhận hình ảnh
camera trên máy tính. Khảo nghiệm khả năng hoạt động của robot với các thông số hệ
thống đo đạc được qua các cảm biến thông minh trên robot. Điều khiển robot bằng bộ
điều khiển cầm tay và thu thập hình ảnh từ các tòa nhà trong khuôn viên trường đại
học Nông Lâm. TP. HCM.
Kế quả thu được: Thiết kế chế tạo thành công robot leo tường ứng dụng trong
bảo trì nhà cao tầng.
iii
MỤC LỤC
Trang
TRANG TỰA
i
LỜI CẢM ƠN
ii
TÓM TẮT iii
MỤC LỤC iv
DANH MỤC HÌNH VÀ BIỂU ĐỒ
DANH MỤC BẢNG
vi
viii
CHƯƠNG 1. TỔNG QUAN
1
1.1 LÝ DO CHỌN ĐỀ TÀI.................................................................................................1
1.2 MỤC TIÊU ĐỀ TÀI.....................................................................................................4
1.3 NỘI DUNG ĐỀ TÀI.....................................................................................................5
1.4 ĐỐI TƯỢNG VÀ PHƯƠNG PHÁP NGHIÊN CỨU.............................................................6
1.5 LỊCH SỬ NGHIÊN CỨU...............................................................................................6
1.5.1 Kết quả nghiên cứu trong nước
6
1.5.2 Kết quả nghiên cứu trên thế giới
7
1.6 Ý NGHĨA KHOA HỌC THỰC TIỄN.............................................................................10
1.7 KẾT QUẢ DỰ KIẾN ĐẠT ĐƯỢC.................................................................................10
CHƯƠNG 2. CƠ SỞ LÝ THUYẾT
11
2.1 TÍNH TOÁN LÝ THUYẾT CHO ROBOT.......................................................................11
2.2 BỘ ĐIỀU KHIỂN PID CHO ROBOT............................................................................14
2.2.1 Bộ điều khiển PID là gì
14
2.2.2 Giải thuật điều khiển PID
14
2.2.3 Lý thuyết điều khiển PID
15
2.2.3 Ứng dụng PID trong điều khiển Robot với Arduino và động cơ Encoder
20
2.3 SƠ LƯỢC VỀ LỊCH SỬ RA ĐỜI CỦA VI SỬ LÝ ARDUINO............................................21
2.5 MẠCH ĐIỀU KHIỂN ESP8266..................................................................................23
2.5.1 Sơ lược về Wi-Fi
23
2.5.2 Giao thức truyền nhận dữ liệu TCP/IP
2.5.1 AI Thinker ESP8266 24
iv
23
2.4 CƠ CẤU ROBOT..................................................................................................25
2.4.1 Mạch điều khiển Arduino Pro Micro
25
2.4.2 ESP Wemos D1 mini 26
2.4.4 Động cơ quạt hút không chổi than 28
2.4.3 Động cơ mini hộp số kim loại 12V 29
2.4.5 Camera IP – Camera truyền hình ảnh qua Wi-Fi 32
CHƯƠNG 3. VẬT LIỆU VÀ PHƯƠNG PHÁP NGHIÊN CỨU
33
3.1 CHỌN LỰA VẬT LIỆU THIẾT KẾ KHUNG XE.............................................................33
3.1.1 Mẫu thiết kế Robot leo tường trong giai đoạn nghiên cứu khoa học
3.1.2 Chọn vật liệu làm khung Robot
33
34
3.1.3 Hoàn thiện thiết kế và bộ hồi tiếp báo mức pin
36
3.2 PHƯƠNG ÁN THIẾT KẾ BỘ PHẬN ĐIỀU KHIỂN..........................................................38
3.2.1 Giải thuật điều khiển Robot leo tường
38
3.2.2 Sơ đồ nguyên lý mạch điều khiển Robot leo tường
40
3.3 THIẾT KẾ CƠ KHÍ ROBOT VÀ BỘ ĐIỀU KHIỂN..........................................................41
3.3.1 Thiết kế cơ khí khung Robot leo tường
41
3.3.2 Thiết kế cơ khí bộ điều khiển cầm tay Robot leo tường 42
CHƯƠNG 4. KẾT QUẢ VÀ THẢO LUẬN
46
4.1 KẾT QUẢ................................................................................................................46
4.1.1 Hình ảnh thu nhận được từ Robot về máy tính qua phần mềm 47
4.2 KHẢO NGHIỆM........................................................................................................49
CHƯƠNG 5. KẾT LUẬN VÀ KIẾN NGHỊ 50
TÀI LIỆU THAM KHẢO
PHỤ LỤC
51
52
v
DANH MỤC HÌNH VÀ BIỂU ĐỒ
Hình 1.1 Robot trong giảng dạy (trái) và thám hiểm (phải)..........................................1
Hình 1.2 Tường bị xuống cấp, rêu mốc.........................................................................2
Hình 1.3 Flying Robot (trái), Climbing Robot (phải)....................................................2
Hình 1.4 Một số mẫu robot leo tường...........................................................................3
Hình 1.5 Công nhân sơn tường trên tòa nhà cao tầng....................................................4
Hình 1.6 Robot lau kính nhà cao tầng do ĐHLH thực hiện...........................................6
Hình 1.7 Các mẫu Robot của City-Climber.................................................................7
Hình 1.8 Robot stickybot (trái) và Robot Rise (phải)....................................................8
Hình 1.9 Robot ROCR..................................................................................................9
Hình 1.10 Robot doAmir Shapiro thiết kế...................................................................10
Hình 2.1 Phân tích lực cho Robot leo tường................................................................11
Hình 2.2 Mô hình tọa độ Robot...................................................................................13
Hình 2.3 Sơ đồ khối bộ điều khiển PID......................................................................14
Hình 2.4 Đồ thị
Hình 2.5 Đồ thị
theo thời gian, ba giá trị
(
và
là hằng số)......................16
theo thời gian, tương ứng với 3 giá trị
(
và
không đổi)
..................................................................................................................................... 17
Hình 2.6 Đồ thị
theo thời gian, tương ứng với 3 giá trị
(
và
không đổi)19
Hình 2.7 Sơ đồ khối của bộ PID điều khiển động cơ DC Servo..................................20
Hình 2.8 Mạch Arduino Uno R3 cơ bản......................................................................22
Hình 2. 9 ESP-12F được hàn trên breakout board.......................................................24
Hình 2.10 Pinout Arduino Pro Micro..........................................................................25
Hình 2.11 Wemos D1 Mini Thực tế.............................................................................26
Hình 2.12 Pinout Wemos D1 Mini..............................................................................27
Hình 2.13 Động cơ hút không chổi than.....................................................................28
Hình 2.14 Điều khiển ESC (trái), pin Lipo (phải).......................................................28
Hình 2.15 Động cơ Mini hộp số kim loại và bánh xe phù hợp....................................29
Hình 2.16 Đặc tính mong muốn của hệ truyền động kéo............................................31
vi
Hình 2.17 Camera IP mini hoạt động bằng pin phát sóng Wi-Fi cự ly lớn..................32
Hình 3.1 Mẫu Robot trong giai đoạn nghiên cứu khoa học.........................................33
Hình 3.2 Mẫu thiết kế với khung Mica và khuyết điểm về dây dẫn............................34
Hình 3.3 Sơ đồ nguyên lý mạch chủ Robot leo tường.................................................35
Hình 3.4 Sơ đồ mạch chia áp đối với bộ đọc điện áp..................................................36
Hình 3.5 Layout mạch chủ Robot leo tường...............................................................37
Hình 3.6 Hình ảnh mạch chủ Robot sau khi hoàn thiện..............................................38
Hình 3.7 Sơ đồ giải thuật điều khiển Robot leo tường................................................39
Hình 3.8 Sơ đồ đọc tín hiệu từ Joystick.......................................................................40
Hình 3.9 Sơ đồ nguyên lý tổng kết điều khiển Robot leo tường..................................40
Hình 3.10 Hình ảnh Joystick tích hợp nút nhấn..........................................................41
Hình 3.11 Thiết kế cơ khí khung Robot leo tường......................................................41
Hình 3.12 Khung Robot leo tường sau khi lắp ghép các linh kiện thực tế..................42
Hình 3.13 Khung điều khiển Robot leo tường.............................................................43
Hình 3.14 Màn hình OLED 1.3 Inchs I2C tích hợp trong bộ điều khiển.....................43
Hình 3.15 Bộ điều khiển sau khi hoàn thành...............................................................44
Hình 3.16 Cài đặt thông số trên tay điều khiển...........................................................45
Hình 4.1 Robot hoàn thiệu sau khi đã kết nối Camera và anten thu sóng....................46
Hình 4.2 Robot đang trong quá trình vận hành thử nghiệm........................................47
Hình 4.3 Hình ảnh Robot ghi lại được trong quá trình vận hành.................................48
Để đây
vii
DANH MỤC BẢNG
Bảng 2.1 Thông số kỹ thuật của Arduino Pro Micro...................................................26
Bảng 4.1 Bảng thông số hệ thống sau khi hoàn thành.................................................49
viii
CHƯƠNG 1
TỔNG QUAN
1.1 Lý do chọn đề tài
Ngày nay, Robot học đã đạt được những thành tự to lớn trong công nghiệp, kinh
tế, y tế, giáo dục, khảo sát, quan sát, quân sự. Bên cạnh những tay robot có khả năng
làm việc với tốc độ cao chính xác và liên tục làm tăng năng suất kinh tế nhiều lần,
những robot với kích thước nhỏ, chính xác làm việc trong các sở y tế lớn của thế giới,
các robot giáo dục cũng dần được triển khai trong các trường học lớn. Các Robot khảo
sát, quan sát cũng đang được ứng dụng rộng rãi trong quan sát, khảo sát trên thế giới
như các Robot khảo sát mặt trăng, sao hỏa, Robot thám hiểm đáy biển, đại dương,
Robot làm việc trong môi trường khắc nghiệt, robot dò mìn, v.v...
Hình 1.1 Robot trong giảng dạy (trái) và thám hiểm (phải)
Robot đã và đang được nghiên cứu rất nhiều để phần nào thay thế sức lao động
của con người.
Tuy nhiên có một vấn đề đặt ra và đang là thách thức đối với các kỹ sư chế tạo
Robot, đó là phải thiết kế được một dòng Robot leo tường, trần nhà, để làm các công
việc trong kiểm tra kết cấu kiến trúc, điều kiện về ẩm mốc, bề mặt vật liệu tòa nhà cao
tầng, hoặc vị trí khó di chuyển đến. Các công việc này trước giờ đều phải thực hiện thủ
công bằng sức người, việc khảo sát trở nên khó khăn ở các vị trí tòa nhà cao tầng việc
kiểm tra thường xuyên và định kì trở nên khó khăn hơn bao giờ hết. Trước yêu cầu và
thách thức như vậy thì người ta đang cố tìm ra giải pháp để thiết kế Robot có thể thay
thế con người thực hiện công việc này.
Hình 1.2 Tường bị xuống cấp, rêu mốc
Hình 1.3 Flying Robot (trái), Climbing Robot (phải)
Về lĩnh vực thiết kế Robot thì có rất nhiều nghiên cứu của nhiều nhà nghiên cứu
tại các trường cao đẳng, đại học. Tuy nhiên về lĩnh vực Robot leo tường và trần nhà thì
đang vấp phải một số khó khăn nhất định, mà trở ngại lớn nhất là cơ cấu bám tường,
bên cạnh đó trọng lượng robot và phương thức điều khiển cũng rất được quan tâm.
Trọng lượng robot thì phải thiết kế làm sao càng gọn nhẹ càng tốt, còn phương thức
điều khiển di chuyển robot thì đòi hỏi phải có những chiến lược đường đi tốt và có khả
năng tránh vật cản như quạt, đèn. Các dạng di chuyển robot đã được nghiên cứu có thể
kể ra là: robot di chuyển theo kiểu chân, sử dụng giác hút chân không có tính linh hoạt
ở nhiều địa hình khác nhau như bề mặt kính, có thể thay thế bằng đinh hoặc gai dính
với bề mặt gồ ghề, ưu điểm của dạng này là có thể di chuyển trên từng bề mặt, linh
kiện dễ kiếm, chi phi thấp, tuy nhiên cơ cấu phức tạp trong chuyển động, phải thay đổi
bộ phân bám dính thường xuyên. Robot di chuyển kiểu bánh xe, khung xe sử dụng lực
hút từ tính có thể giúp robot vận hành trên bề mặt tôn hoặc thép, ưu điểm của kiểu này
là có thể di chuyển trên bề mặt kim loại, cơ cấu thiết kế đơn giản, dễ dàng điều khiển,
nhược điểm của dạng này là khó khăn trong chế tạo bánh xe từ tính, robot không thể di
chuyển trên bề mặt không chịu ảnh hưởng bởi từ tính. Robot di chuyển theo kiểu bánh
xe có ưu điểm là chuyển động liên tục trên bề mặt phẳng, nhanh, dễ dàng với các ứng
dụng như lau chùi kính các nhà cao tầng. Phương án sử dụng robot có máy bơm chân
không để tạo áp lực cần các linh kiện là máy nén khí, bộ phận điều khiển, động cơ DC
cùng cơ cấu các van khí, solenoid, điểm tiếp xúc là các tấm hút có ưu điểm là khả năng
bám hút cao, di chuyển trên nhiều bề mặt tuy nhiên có nhược điểm là cơ cấu thiết kế
khó khăn, cần phải có ống tải khí từ máy nén đến robot nên phạm vi di chuyển hẹp,
điều khiển phức tạp.
Hình 1.4 Một số mẫu robot leo tường
Nhìn chung lĩnh vực nghiên cứu Robot leo tường, bám trần nhà cũng còn tương
đối mới mẽ và có nhiều khó khăn thách thức. Nếu được nghiên cứu thành công thì kết
quả nghiên cứu sẽ được ứng dụng vào cuộc sống một cách thiết thực chẳng hạn như:
Robot thay con người để sơn tường, để lau cửa kính nhà cao tầng, để quét dọn trần
nhà, để leo lên cao khảo sát, quan sát…
Hình 1.5 Công nhân sơn tường trên tòa nhà cao tầng
1.2 Mục tiêu đề tài
Cho tới nay, phần lớn các robot leo trèo đều sử dụng các kỹ thuật cơ bản như:
Kỹ thuật từ tính được sử dụng để leo trên bề mặt kim loại.
Kỹ thuật hút chân không cho những bề mặt nhẵn không lồi lõm.
Kỹ thuật làm phát sinh lực hút dựa trên nguyên tắc khí động học.
Kỹ thuật mô phỏng sinh học tương tự lấy cảm hứng từ động vật leo trèo.
Kỹ thuật sử dụng keo và các loại chất dính kết để bám dính.
Mặc dù vậy, những công nghệ đó chỉ hiệu quả đối với một số bề mặt nhất định
nên vẫn còn không ít những mặt tồn tại cần khắc phục như: không thể bám vào bề mặt
xốp hoặc đầy bụi của các toà nhà. Mặt khác, nếu sử dụng chất dính để bám vào bề mặt
thì có thể để lại cho bề mặt những vết dơ mà ta không mong muốn. Trong phần luận
văn này cũng sẽ tiếp bước nghiên cứu về lĩnh vực robot leo tường để dần hoàn thiện
hơn nữa những mặt tồn tại hiện nay chưa được khắc phục như đã nói ở trên. Vì vậy
mục đích nghiên cứu là: Thiết kế, chế tạo mô hình Robot leo tường trần nhà có thể
di chuyển dễ dàng trên tường, trần nhà sử dụng camera để đánh giá các lỗi khe hỏ,
nứt, sơn rêu móc trong công tác bảo trì, bảo dưỡng các tòa nhà cao tầng.
1.3 Nội dung đề tài
Nhiệm vụ của đề tài:
Thiết kế, chế tạo được Robot có thể leo được trên tường, bám được trên trần nhà
thông qua cơ cấu hút được cung cấp bằng quạt hút tạo áp suất. Thiết kế, chế tạo được
robot có thể bám được trên nhiều loại vật liệu bề mặt khác nhau như: tường, gỗ, kim
loại, kính, nhựa...
Thiết kế bộ điều khiển không dây để điều khiển Robot bám được tường, trần nhà.
Sử dụng camera để truyền nhận hình ảnh về máy tính, nhằm đánh giá các lỗi khe
hỏ, nứt, sơn rêu móc trong công tác bảo trì, bảo dưỡng các tòa nhà cao tầng...
Thiết kế giao diện thu nhận hình ảnh camera, điều khiển Robot leo tường trên các
tòa nhà khuôn viên trường Đại học Nông Lâm TP. HCM để khảo sát khả năng hoạt
động của robot trên thực tế.
Giới hạn của đề tài:
Robot này được thiết kế và sử dụng trong thời gian cho phép để thu thập dữ liệu
hình ảnh về máy tính để đánh giá, khảo sát.
Robot chỉ di chuyển trong các bề mặt là mặt phẳng không bao phải là mặt cong.
Thời gian có hạn nên đề tài chỉ dừng lại ở việc ứng dụng kết quả nghiên cứu bộ
điều khiển không dây bằng sóng Wifi mà không phải nghiên cứu phần tự di chuyển và
tránh vật cản của robot khi di chuyển trên trần nhà.
1.4 Đối tượng và phương pháp nghiên cứu
Từ cơ sở lý thuyết nền tảng là phương trình Bernoully ta phát thảo sơ bộ hình
dáng hình học cho quạt hút EDF. Sau đó, tiến hành lựa chọn và tiến hành thiết kế mô
hình dựa trên thông số áp suất tối đa quạt có thể đạt được.
Thiết kế bộ phận điều khiển dựa trên sóng Wifi để có thể phát triển tính năng
điều khiển IoT về sau. Mạch điều khiển là bàn phím ma trận số để có thể điều khiển
robot di chuyển dễ dàng.
Mô phỏng thiết kế trên các phần mềm thiết kế SolidWorks.
Thiết kế cơ cấu truyền nhận dữ liệu hình ảnh thông qua camera IP mini. Dùng
camera quan sát bề mặt robot di chuyển để thu thập hình ảnh.
1.5 Lịch sử nghiên cứu
1.5.1 Kết quả nghiên cứu trong nước
Robot Lau kính nhà cao tầng: Sở Khoa học - công nghệ vừa tổ chức nghiệm thu
đề tài nghiên cứu chế tạo robot lau kính nhà cao tầng. Đề tài này do nhóm giảng viên
Trường đại học dân lập Lạc Hồng thực hiện với kinh phí 120 triệu đồng. Bắt đầu triển
khai từ cuối năm 2004, sau gần hai năm thiết kế, chế tạo, phần trình diễn của nhóm tác
giả tại buổi nghiệm thu đã được Hội đồng khoa học của tỉnh đánh giá thành công.
Robot lau kính do nhóm giảng viên Trường ĐHDL Lạc Hồng nghiên cứu chế tạo.
Hình 1.6 Robot lau kính nhà cao tầng do ĐHLH thực hiện
1.5.2 Kết quả nghiên cứu trên thế giới
Trên thế giới đã có nhiều nhà nghiên cứu về robot leo tường. Những nghiên cứu
từ các đại học nổi tiếng trên thới giới cũng như những công ty chuyên về thiết kế chế
tạo Robot. Và tất cả các dòng Robot leo tường được cho ra đều có những ưu nhược
điểm khác nhau, tùy từng mục đích sử dụng mà ta ứng dụng chúng trong công việc.
Đặc biệt nổi trội trong số đó có thể kể đến một số nghiên cứu và một số mẫu
Robot leo tường nổi bật sau đây:
Robot City-Climber được Jizhong Xiao and Ali Sadegh thuộc trường đại học
City của Hoa Kỳ dựa trên nguyên lý nền tảng là khí động lực học đã chế tạo thành
công robot leo tường có khả năng leo lên tường, đi trên trần nhà và chuyển tiếp giữa
các bề mặt khác nhau.
Hình 1.7 Các mẫu Robot của City-Climber
Việc phát triển cơ cấu bám dính, đánh dấu bước phát triển đột phá của việc bắt
chước động vật leo trèo. Nghiên cứu bàn chân tắc kè là nguồn cảm hứng cho việc phát
triển các Robot leo bao gồm phiên bản đầu được phát triển từ Mecho-gecko.
Irobot kết hợp với UC berkely của phòng thí nhiệm PEDA, Wallbot đã được phát
triển ở đại học Carnegie và gần đây hơn là Stickybot ở đại học Stanford Những robot
này lấy bàn chân tắc kè làm cảm hứng và đã có những thành công nhất định trong ứng
dụng leo trèo.
Hình 1.8 Robot stickybot (trái) và Robot Rise (phải)
Robot Rise lấy cảm hứng từ con dán với các móc ngón chân sắc nhọn di chuyển
trên tường lỗi lõm, các loại bề mặt nhẵn thì robot này không di chuyển được, mặt khác
nó di chuyển chậm do phải đảm bảo các chân phải bám chặt vào các gờ trên tường.
Một robot có thể leo tường khéo léo với nhiều ứng dụng tiềm tàng đang được chế
tạo ở Mỹ. ROCR là công trình sáng tạo của các chuyên gia thuộc Đại học Utah. Robot
này sử dụng hai mấu, một động cơ và một cái đuôi đong đưa như quả lắc đồng hồ để
leo lên bức tường phủ thảm cao 2,4 mét trong 15 giây, như một vận động viên leo núi
chuyên nghiệp hoặc một con khỉ đánh đu từ cành cây này sang cành khác.
Hiện nay, ROCR chỉ giới hạn ở các bức tường trải thảm, nhưng các nhà nghiên
cứu đang làm việc để thích ứng với các bề mặt khác - trong khi vẫn giữ hiệu quả như
là ưu tiên hàng đầu. Giáo sư William Provancher tại Đại học Utah và là người đứng
đầu của dự án ROCR giải thích: “Hiệu quả leo trèo cao hơn sẽ kéo dài tuổi thọ pin của
robot tự động, tự động và mở rộng nhiều loại robot mà robot có thể thực hiện”.
(a)
(b)
Hình 1.9 Robot ROCR.
Một nhà khoa học có tên Amir Shapiro, anh đang làm việc tại trường Đại học
Ben-Gurion, Israel. Các loại robot mới do anh thiết kế đều có thể leo những bức tường
thẳng đứng, thậm chí di chuyển qua các góc tường rất ấn tượng và không hề bị rơi.
Con robot thứ nhất (Hình 1.9 b), nó có phương thức leo trèo giống như mèo hay động
vật có móng vuốt, 4 "chân" gồm các móng vuốt sắc nhọn, giúp bám chặt vào tường
hay cây cối. Trong khi đó chú robot thứ hai (Hình 1.10 b) trong bộ sưu tập robot leo
tường của Shapiro có bánh là nam châm, có thể leo những bề mặt có từ tính dễ dàng.
Với 4 chú robot này, Shapiro cho biết nó là ý tưởng, nguồn cảm hứng thiết kế cho các
robot trinh thám hay robot làm những nhiệm vụ đặc biệt trong tương lai.
(a)
(b)
Hình 1.10 Robot do Amir Shapiro thiết kế.
1.6 Ý nghĩa khoa học thực tiễn
Với lịch sử phát triển robot leo tường trên thế giới có thể thấy nội dung này được
quan tâm nhiều và luôn cố gắng đạt được mục tiêu đa dụng trong thiết kế, với nhiều
mẫu robot với nhiều chức năng khác nhau. Cần thiết phải tạo ra một robot với giá
thành thấp, dễ dàng trong điều khiển để đưa vào thực tế nhằm tăng năng xuất lao động,
an toàn và tiết kiệm chi phí. Tích hợp thêm cảm biến, camera, chúng có khả năng gửi
nhận dữ liệu môi trường về hệ thống máy chủ xử lý, nghiên cứu kết cấu hạ tầng, kiểm
tra mối hàn, kiểm tra vết nứt, độ ẩm, màu sắc hoặc các thông tin môi trường tại địa
điểm thực thi nhiệm vụ Robot. Đặc biệt trong lĩnh vực an ninh, quân sự, có thể tích
hợp chương trình tự hành để quan sát, gửi dữ liệu hình ảnh về trung tâm điều khiển.
1.7 Kết quả dự kiến đạt được
Trong khóa luận này sẽ chỉ ra cách để chế tạo một robot leo tường và hệ thống
điều khiển của nó. Robot sẽ đáp ứng được yêu cầu leo trên các bề mặt khác nhau với
thời gian làm việc vừa đủ để thu thập hình ảnh về máy tính phục vụ công tác khảo sát.
Robot điều khiển bằng tay với bộ điều khiển riêng biệt để có thể dễ dàng hơn trong
thao tác và tăng phạm vi điều khiển. Camera gắn trên robot có thể vừa ghi lại hình ảnh
trong quá trình di chuyển cũng như có thể chụp chính xác vị trí cần khảo sát và truyền
liệu trực tiếp về máy tính qua Wireless hoặc có thể lưu trữ trên thẻ nhớ microSD.
CHƯƠNG 2
CƠ SỞ LÝ THUYẾT
2.1 Tính toán lý thuyết cho Robot
Để chế tạo Robot leo tường được với thiết kế bao gồm bánh xe, máy ảnh, hoặc
thiết bị khác thì ta cần tính toán để chọn các thiết bị bao gồm động cơ, bánh xe, khung
sườn cho Robot phù hợp với yêu cầu về trọng lượng Robot. Với một robot leo tường
được ứng dụng trong việc khảo sát thì yêu cầu hệ thống lái phải linh hoạt là hết sức
cần thiết. Cần lưu ý là ở những góc tường (góc vuông) thì robot gần như phải đứng
đứng và xoay tránh trường hợp bị rơi rớt trong quá trình di chuyển.
Trong phần này ta chỉ sét trên mặt tường đứng vì mặt trường nằm ngang robot
chỉ cần thắng lại trọng lực là có thể đứng yên. Nói cách khác là quạt hút chỉ đảm
nhiệm thắng trọng lực di chuyển là do động cơ.
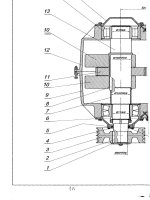
Hình 2.1 Phân tích lực cho Robot leo tường
Quan sát phân tích lực ở Hình 2.1 ta có phương trình:
Trong đó:
- Phản lực tại vị trí tiếp xúc giữa bánh xe và mặt tường.
- Lực hút do cơ cấu hút của Robot tạo ra.
- Lực ma sát giữa bánh xe và mặt tường.
- Hệ số ma sát.
- Khối lượng của Robot.
- Gia tốc trọng trường.
Từ hệ phương trình cân bằng lực
ta thấy, nếu ta làm tăng hệ số ma sát và
tăng giá trị lực hút lên thì có thể tăng được khối lượng robot thiết kế. Hay nói cách
khác, để Robot có thể mang được khối lượng lớn hơn nữa thì ta phải tìm cách tăng một
trong hai thông số lực hút và hệ số ma sát, hoặc tăng cả hai thông số này lên thì càng
tốt. Ta biết rằng hệ số ma sát sẽ phụ thuộc vào vật liệu bề mặt tiếp xúc, độ nhẵn bóng
bề mặt và thời gian tiếp xúc chứ nó không bị ảnh hưởng bởi diện tích tiếp xúc, áp suất
tiếp xúc và vận tốc chuyển động tương đối giữa hai bề mặt.
Với những phân tích đó, ta có thể quyết định chọn hệ thống bánh dẫn có bốn
bánh truyền động tiêu chuẩn nối với động cơ và chuyển hướng dựa trên điều khiển vận
tốc hai bên động cơ cho phù hợp.
Để chọn lựa được các loại động cơ phù hợp cho cơ cấu Robot leo tường ta sẽ cần
tính toán thực tế các thông số để chọn lựa loại động cơ hút phù hợp và động cơ bánh
dẫn phù hợp. Chi tiết hơn về tính toán sẽ được đề cập ở Chương 2. Phần 2.4.
Dựa vào điều kiện ban đầu của robot mô hình robot với khung và các bánh di
chuyển để viết phương trình động học cho robot sau đó áp dụng công thức EulerLagrange cho khung xe robot.
Mô hình hệ tọa độ của robot được trình bày bởi Hình 2.2:
Hình 2.2 Mô hình tọa độ Robot.
Với các thông số:
x, y: Tọa độ trọng tâm của robot
v(t), w(t): Bận tốc dài, góc của robot
Mc, Mw: Khối lượng trục robot, bánh xe
Rc, Rw: Bán kính trục robot, bánh xe
Ic, Iw: Các momen quán tính robot, bánh xe
Sử dụng phương trình Lagrange II để tính toán được vận tốc và gia tốc của robot
khi leo tường, ta được công thức tính gia tốc dài và gia tốc góc của robot khi hoạt động
leo tường là:
Từ 2 phương trình đòi hỏi gia tốc dài, gia tốc góc của robot yêu cầu khi hoạt
động phụ thuộc vào bán kính bánh xe, bán kính khung robot, gia tốc góc của bánh trái
và gia tốc góc của bánh xe phải.
2.2 Bộ điều khiển PID cho Robot
2.2.1 Bộ điều khiển PID là gì
Một bộ điều khiển vi tích phân tỉ lệ (bộ điều khiển PID- Proportional Integral
Derivative) là một cơ chế phản hồi vòng điều khiển tổng quát được sử dụng rộng rãi
trong các hệ thống điều khiển công nghiệp – bộ điều khiển PID là bộ điều khiển được
sử dụng nhiều nhất trong các bộ điều khiển phản hồi. Bộ điều khiển PID sẽ tính toán
giá trị "sai số" là hiệu số giữa giá trị đo thông số biến đổi và giá trị đặt mong muốn. Bộ
điều khiển sẽ thực hiện giảm tối đa sai số bằng cách điều chỉnh giá trị điều khiển đầu
vào. Tuy nhiên, để đạt được kết quả tốt nhất, các thông số PID sử dụng trong tính toán
phải điều chỉnh theo tính chất của hệ thống-trong khi kiểu điều khiển là giống nhau,
các thông số phải phụ thuộc vào đặc thù của hệ thống.
2.2.2 Giải thuật điều khiển PID
Giải thuật tính toán bộ điều khiển PID bao gồm 3 thông số riêng biệt, do đó đôi
khi nó còn được gọi là điều khiển ba khâu: các giá trị tỉ lệ, tích phân và đạo hàm, viết
tắt là P, I, và D. Giá trị tỉ lệ xác định tác động của sai số hiện tại, giá trị tích phân xác
định tác động của tổng các sai số quá khứ, và giá trị vi phân xác định tác động của tốc
độ biến đổi sai số. Tổng chập của ba tác động này dùng để điều chỉnh quá trình thông
qua một phần tử điều khiển như vị trí của van điều khiển hay bộ nguồn của phần tử gia
nhiệt. Nhờ vậy, những giá trị này có thể làm sáng tỏ về quan hệ thời gian: P phụ thuộc
vào sai số hiện tại, I phụ thuộc vào tích lũy các sai số quá khứ, và D dự đoán các sai số
tương lai, dựa vào tốc độ thay đổi hiện tại.
Hình 2.3 Sơ đồ khối bộ điều khiển PID
Bằng cách điều chỉnh 3 hằng số trong giải thuật của bộ điều khiển PID, bộ điều
khiển có thể dùng trong những thiết kế có yêu cầu đặc biệt. Đáp ứng của bộ điều khiển
có thể được mô tả dưới dạng độ nhạy sai số của bộ điều khiển, giá trị mà bộ điều khiển
vọt lố điểm đặt và giá trị dao động của hệ thống. Lưu ý là công dụng của giải thuật
PID trong điều khiển không đảm bảo tính tối ưu hoặc ổn định cho hệ thống.
2.2.3 Lý thuyết điều khiển PID
Sơ đồ điều khiển PID được đặt tên theo ba khâu hiệu chỉnh của nó, tổng của ba
khâu này tạo thành bởi các biến điều khiển (MV). Ta có:
Trong đó:
và
là các thành phần đầu ra từ ba khâu của bộ điều
khiển PID, được xác định như dưới đây.
Khâu tỉ lệ (đôi khi còn được gọi là độ lợi) làm thay đổi giá trị đầu ra, tỉ lệ với giá
trị sai số hiện tại. Đáp ứng tỉ lệ có thể được điều chỉnh bằng cách nhân sai số đó với
một hằng số Kp, được gọi là độ lợi tỉ lệ.
Khâu tỉ lệ được cho bởi:
Trong đó:
: thừa số tỉ lệ của đầu ra
: độ lợi tỉ lệ, thông số điều chỉnh
: sai số =
: thời gian hay thời gian tức thời (hiện tại)
Độ lợi của khâu tỉ lệ lớn là do thay đổi lớn ở đầu ra mà sai số thay đổi nhỏ. Nếu
độ lợi của khâu tỉ lệ quá cao, hệ thống sẽ không ổn định . Ngược lại, độ lợi nhỏ là do