Bài giảng Kỹ thuật cảm biến: Cảm biến
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (1.66 MB, 60 trang )
CẢM BIẾN (SENSOR)
Giảng viên: Vũ Hoàng Nghiên
7.1.1 Khái niệm
Cảm biến là thiết bị dùng để cảm nhận biến đổi các đại lượng vật
lý và các đại lượng không có tính chất điện cần đo thành các đại
lượng có thể đo và xử lý được.
Các đại lượng đo (M) thường không có tính chất điện (như nhiệt
độ, áp suất, trọng lượng…) tác động lên cảm biến cho ta đại lượng
đặc trưng (S) mang tính chất điện như (như điện tích, điện áp,
dòng điện hay trở kháng) chứa đựng thông tin cho phép xác định
giá trị của đại lượng đó.
Đặc trưng (s) là hàm của đại lượng cần đo (M)
S = F(M)
Người ta gọi (S) là đại lượng đầu ra hoặc phản ứng của cảm biến.
(M) là đại lượng đầu vào hay kích thích ( có nguồn gốc đại lượng
cần đo). Thông qua đo đạc (S) cho phép nhận biết giá trị (M)
7.1.2 Phân loại cảm biến
Các bộ cảm biến được phân loại theo đặc trưng sau
đây:
Theo nguyên lý chuyển đổi giữa đáp ứng kích thích.
Phân loại theo dạng kích thích
Phân loại theo phạm vi sử dụng
Phân loại theo thông số mô hình mạch thay thế
Theo nguyên lý chuyển đổi giữa đáp
ứng kích thích
Hiện
tượng
Vật lý
Hoá học
Sinh Học
Chuyển đổi và đáp ứng kích thích
Nhiệt điện; Quang điện; Quang từ
Điện từ; Quang đàn hồi; Từ điện
Nhiệt từ....
Biến đổi hoá học ; Biến đổi điện hoá
Phân tích phổ…..
Biến đổi sinh hoá; Biến đổi vật lý.
Hiệu ứng trên cơ thể sống
Phân loại theo dạng kích thích
Âm
thanh
Biên pha, phân cực; Phổ; Tốc độ truyền sóng
Điện
Điện tích, dòng điện; Điện thế, điện áp
Điện trường; Điện dẫn, hằng số điện môi
Từ
Từ trường; Từ thông, cường độ điện trường; Độ từ
thẩm
Quang
Biên, pha, phân cực,phổ; Tốc độ truyền
Hệ số phát xạ, khúc xạ; Hệ số hấp thụ, hệ số bức
xạ
Cơ
Vị trí; lực ,áp suất; Gia tốc, vận tốc
Ứng suất, độ cứng; Moment; Khối luợng tỷ trọng
Vân tốc chất lưu, độ nhớt…
Nhiệt
Nhiệt độ; Thông lượng; Nhiệt dung, tỉ nhiệt
Bức xạ
Kiểu; Năng lượng; Cường độ
Theo tính năng của bộ cảm biến
Độ nhạy
Độ chính xác
Độ phân giải
Độ chọn lọc
Độ tuyến tính
Công suất tiêu thụ
Dải tần
Độ trễ
Theo tính năng của bộ cảm biến
Độ nhạy
Độ chính xác
Độ phân giải
Độ chọn lọc
Độ chính xác
Độ tuyến tính
Công suất tiêu thụ
Dải tần
Độ trễ
Khả năng quá tải
Tốc độ đáp ứng
Độ ổn định
Tuổi thọ
Điều kiện lựa chọn
Kích thước, trọng lượng
Phân loại theo phạm vi sử dụng
Khả năng quá tải
Tốc độ đáp ứng
Độ ổn định
Tuổi thọ
Điều kiện lựa chọn
Kích thước, trọng lượng
Phân loại theo phạm vi sử dụng
Công nghiệp
Nghiên cứu khoa học
Môi trường, khí tượng
Thông tin, viễn thông
Nông nghiệp
Dân dụng
Vũ trụ
Quân sự
Phân loại theo thông số mô hình
mạch thay thế
Cảm biến tích cực đầu ra là nguồn áp, nguồn dòng
(NPN, PNP…)
Cảm biến thụ động được đặc trưng bởi thông số R, L,
C, M…..tuyến tính hoặc phi tuyến
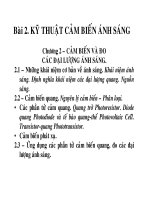
Đường cong chuẩn của cảm biến là đường cong được
biểu diễn sự phụ thuộc vào đại lượng điện (S) ở đầu ra
của cảm biến vào giá trị của đại lượng đo (m) ở đầu
vào.
7.1.3.ngcongchunca
cmbin
ngcongcbiuthbiudinbngbiuthc
isdidngS=F(M)hocbngthsauõy:
s
s
0
m
a)
0
m
b)
Hinh1:ẹửụứngcongchuaồncuỷacaỷmbieỏn
7.1.3. Đường cong chuẩn của
cảm biến
Dạng đường cong chuẩn
Dựa vào đường cong chuẩn của cảm biến, ta có thể
xác định giá trị chuẩn Mi chưa biết của M thông qua
giá trị đo được Si của S
Để dễ sử dụng, người ta thường chế t ạo cảm biến
có sự phụ thuộc tuyến tính giữa đại lượng đầu ra và
đầu vào, phương trình S = F(M) có dạng S = AM+B
với A,B là các hệ số, đường cong chuẩn là đường
thẳng
7.2 CẢM BIẾN TIỆM CẬN
7.2.1 Đặc điểm
7.2.2 Các thuật ngữ thường sử dụng
7.2.3 Cảm biến tiệm cận cảm ứng
7.2.4 Cảm biến tiệm cận điện dung
7.2.5 Cảm biến quang
7.2.6 Các ứng dụng cảm biến trong công nghiệp
7.2.1.Đặc điểm
Phát hiện vật không cần tiếp xúc
Tốc độ đáp ứng nhanh
Đầu cảm biến nhỏ có thể lắp đặt nhiều nơi
Có thể sử dụng trong môi trường khắc nghiệt
7.2.2. Các thuật ngữ thường sử
dụng
Vật chuẩn (standard sensing object)
Khoảng cách phát hiện (sensing distance)
Khoảng cách cài đặt (Setting distance)
Thời gian đáp ứng (Response time)
Tần số đáp ứng (Response Frequency)
Vật chuẩn (standard sensing
object)
Một vật được là vật chuẩn nếu hình dạng, vật liệu kích
cỡ… của vật liệu phải phù hợp để phát huy hết đặc tính
kỹ thuật của sensor.
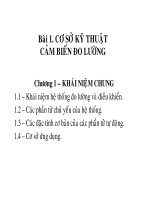
Khoảng cách phát hiện (sensing
distance)
là khoảng cách từ bề mặt cảm biến ở đầu sensor tới vị
trí vật chuẩn xa nhất mà sensor có thể phát hiện được.
OFF
Bề mặt
cảm
biến
biến
ON
Đối
tượn
g
Cảm
Biến
Khoảng cách
Phát hiện
Khoảng cách Reset
Cảm biến
tiệm cận
Khoảng cách cài đặt (Setting
distance)
là khoảng cách từ bề
mặt cảm biến ở đầu
sensor tới vị trí vật
cảm biến để sensor
có thể phát hiện vật
ổn định (thường
khoảng cách này
bằng 7080% khoảng
cách phát hiện)
Khoảng cách
cài đặt
Đối
tượn
g
của
Cảm
Biến
biến
Khoảng cách
ước lượng
Cảm biến
tiệm cận
Bề mặt cảm
Ngõ
ra
Thời gian đáp ứng (Response
time)
Cảm biến
tiệm cận
Dãi hoạt
động
Đối
tượng
của
Cảm
Biến
biến
Ngõ
ra
Bề mặt cảm
Trong dãi
hoạt động
ON
Ngoài dãy
hoạt
động
OFF
T1 T2
T1: Khoảng thời
gian từ lúc đối
tượng chuẩn
chuyển động đi
vào vùng phát hiện
của sensor tới lúc
đầu ra của sensor
lên ON
T2: Khoảng thời
gian từ lúc đối
tượng chuẩn
chuyển động đi ra
khỏi vùng phát
hiện của sensor
tới khi đầu ra của
sensor tắt về
Tnsỏpng(Response
Frequency)
lslntỏcnglplikhicmbinivovựng
hotngcasenso
/
f=1 T1+T2
M 2M
zM
Khoaỷng
caựch ẵ
caỷm bieỏn
Vaọt caỷm
bieỏn
T1T2T3
7.2.3 Cảm biến tiệm cận cảm
ứng
Cảm biến cảm ứng từ gồm có 4 khối chính:
Cuộn dây và lõi Fefit
mạch dao động
mặt phát hiện
mặt đầu ra
7.2.3 Cảm biến tiệm cận cảm
ứng
Mạch dao động phát dao động điện từ tần số radio. Từ
trường biến thiên tập trung từ lõi sắt sẽ móc vòng qua
đối tượng kim loại đặt đối diện với nó. Khi đối tượng lại
gần sẽ có dòng điện Foucaul cảm ứng lên trên mặt đối
tượng tạo nên một tải gỉm tín hiệu dao động. Bộ phát
hiện sẽ phát hiện sự thay đổi trạng thái biên độ mạch
dao động. Mạch phát hiện ở vị trí ON phát tín hiệu mặt
đầu ra ở vị trí ON
Từ trường do cuộn dây cảm biến thay đổi khi tương tác
với vật thể bằng kim loại. Do đó, loại cảm biến này chỉ
phát hiện vật thể bằng kim loại.
7.2.3 Cảm biến tiệm cận cảm
ứng
Đặc điểm:
Phát hiện vật không cần tiếp xúc
Đầu cảm biến nhỏ có thể lắp đặt nhiều nơi
Tốc độ đáp ứng nhanh
Làm việc trong môi trường khắc nghiệt
Làm việc theo nguyên lý cảm ứng từ, do đó dễ bị
ảnh hưởng của nguồn nhiễu hay ảnh hưởng của
nguồn ký sinh
7.2.3 Cảm biến tiệm cận cảm
ứng
Cảm biến sử dụng điện áp một chiều khoảng 10
30VDC, đầu ra cảm biến chịu dòng điện nhỏ (tối đa
khoảng 200mA), đo đó thường đấu nối ra thiết bị trung
gian (rơle trung gian, bộ điều khiển cảm biến . . . . )
Một số hình ảnh các loại cảm
biến cảm ứng từ