Nghiên cứu xác định kích thước tối ưu theo lưu lượng của bơm hypôgerôto tt
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (1.14 MB, 24 trang )
LỜI MỞ ĐẦU
1. Tính cấp thiết của luận án
Bơm thủy lực thể tích (TLTT) bánh răng ăn khớp trong có biên dạng là
đường cong xyclôít lần đầu tiên được phát minh bởi F.Hill vào năm 1920
[1] hay còn được gọi là bơm TLTT rôto với nguyên lý hoạt động được ví
như động cơ Vanken. Dựa trên nguyên lý hình thành biên dạng răng và đặc
điểm ăn khớp của cặp bánh răng có biên dạng là họ đường cong xyclôít mà
loại bơm này được phân thành hai loại đó là: (i) Khi đường cong xyclôít
dùng làm biên dạng răng của cặp bánh răng (cặp rôto) là đường epixyclôít
thì được gọi là bơm Gerôto; (ii) Khi đường cong xyclôít dùng làm biên
dạng răng của cặp bánh răng (cặp rôto) là đường cong hypôxyclôít thì
được gọi là bơm Hypôgerôto.
Trong quá trình phát triển gần một trăm năm qua loại bơm này đã được
nghiên cứu phát triển và ngày càng hoàn thiện cho các ứng dụng của hệ
thống bôi trơn [2, 3], kết quả là đã có rất nhiều bằng phát minh sáng chế
sau mỗi kết quả nghiên cứu [4, 5]. Do đặc điểm kích thước nhỏ gọn làm
việc êm, không ồn và lưu lượng lớn hơn các loại bơm TLTT cùng kích
thước mà từ những năm 50 của thế kỷ trước loại bơm này đã được ứng
dụng trong hệ thống bôi trơn của động cơ đốt trong. Do đó, loại bơm này
được nghiên cứu và phát triển cùng với sự phát triển của ngành công
nghiệp ôtô thế giới. Tuy nhiên, do thời gian đầu việc chế tạo rôto ngoài với
vành răng có biên dạng là đường cong hypôxyclôít gặp rất nhiều khó khăn
và giá thành gia công chế tạo cao hơn rất nhiều so với cặp bánh răng có
biên dạng epixyclôít, nên hầu hết các nghiên cứu trước đây tập trung vào
hoàn thiện lý thuyết và ứng dụng chủ yếu cho loại bơm bôi trơn Gerôto,
còn loại bơm Hypôgerôto chỉ được nhắc đến về mặt hình học trong sách lý
thuyết bánh răng răng của Litvin vào những năm 1950 [12]. Cho đến những
năm cuối cùng của cuộc cách mạng công nghiệp lần thứ 3 và bước vào thời
kỳ cách mạng công nghiệp 4.0 với sự phát triển của các máy công cụ điều
khiển số hiện đại cũng như xuất hiện các phương pháp gia công mới, dẫn
đến việc gia công chế tạo bánh răng hypôxyclôít với vành răng trong trở lên
đơn giản và giá thành sản xuất hai loại bánh răng epixyclôít và hypôxyclôít
là như nhau. Điều đó dẫn đến loại bơm hypôgerôto bắt đầu được nghiên
cứu trở lại trong những năm gần đây 2009 [13].
1
Mặt khác, ngành công nghiệp ô tô ngày càng phát triển với các mẫu xe ô
tô hiện đại theo xu thế tiết kiệm nhiên liệu tiêu thụ và việc bôi trơn tốt đóng
vai trò quan trọng trong xu thế này, để có thể tiết kiệm từ 10 ÷ 15% lượng
nhiên liệu tiêu thụ. Chính vì vậy, đây là động lực cho việc lựa chọn đối
tượng nghiên cứu của tác giả luận án là bơm Hypôgerôto với mục tiêu đặt
ra là tối ưu các thông số thiết kế đặc trưng của bơm theo lưu lượng cho
trước.
2. Mục tiêu của luận án
Luận án đặt ra mục tiêu tối ưu các tham số thiết kế đặc trưng {R, rcl, R1}
của bơm bôi trơn hypôgerôto theo {E, z1} và lưu lượng Q cho trước nhằm
giảm kích thước hướng kính thiết kế của bơm nhưng vẫn đảm bảo lưu
lượng, áp suất và chất lượng dòng chảy sau bơm. Để đạt được mục tiêu đề
ra luận án phải giải quyết được các vấn đề cụ thể chính như sau:
i) Xác định được các điều kiện hình thành biên dạng bánh răng trong
(rôto trong) và bánh răng ngoài (rôto ngoài) nhằm đảm bảo lưu
lượng và áp suất cũng như không xảy ra hiện tượng tồn đọng chất
lỏng sau mỗi vòng quay gây ra lực quán tính ly tâm có hại cho
máy. Trên cơ sở đó xác định chính xác bán kính chân răng bánh
răng trong.
ii) Trên cơ sở phân tích động học đưa ra điều kiện xác định bán kính
đỉnh răng bánh răng trong rcl nhằm đảm bảo điều kiện mòn đều hai
biên dạng đối tiếp theo tiêu chí động học và điều kiện bánh kính R
chân răng của rôto trong đảm bảo không va chạm với rôto ngoài
trong quá trình làm việc.
iii) Xây dựng thuật toán tối ưu các tham số thiết kế đặc trưng trên cơ sở
các điều kiện biên đưa ra bởi luận án để đảm bảo kích thước hướng
kính nhỏ nhất mà vẫn đáp ứng được lưu lượng và áp suất cũng như
chất lượng dòng chảy sau bơm.
3. Đối tƣợng và phạm vi nghiên cứu của luận án
3.1. Đối tƣợng nghiên cứu của luận án
Đối tượng nghiên cứu chung của luận án là các bơm thủy lực thể tích
bánh răng ăn khớp trong biên dạng xyclôít được ứng dụng phổ biến trong
các hệ thống bôi trơn. Trong đó, đối tượng cụ thể là loại bơm rôto kiểu
bánh răng ăn khớp trong Hypôgerôto, với rôto ngoài có biên dạng là đường
2
hypôxyclôít còn rôto trong có biên dạng là các cung tròn lồi lõm, ứng dụng
trong các hệ thống bôi trơn của động cơ đốt trong.
3.2. Phạm vi nghiên cứu của luận án
Đối với các loại bơm bôi trơn trong động cơ đốt trong các thông số quan
trọng là lưu lượng, áp suất, chất lượng dòng chảy của dòng chất lỏng sau
bơm (dao động lưu lượng và dao động áp suất). Do đó, phạm vi của luận
án là tập trung vào việc tối ưu các thông số thiết kế đặc trưng nhằm đảm
bảo các thông số quan trọng trên và nâng cao tuổi thọ của bơm thông qua
điều kiện mòn đều của cặp bánh răng hypôxyclôít hình thành các khoang
hút và đẩy của bơm Hypôgerôto.
4. Ý nghĩa khoa học và thực tiễn của luận án
4.1 Ý nghĩa khoa học
Các kết quả nghiên cứu của luận án như các điều kiện biên hình thành
biên dạng bánh răng, điều kiện tránh va chạm giữa rôto trong và rôto ngoài
trong quá trình làm việc, điều kiện mòn đều biên dạng cặp bánh răng theo
tiêu chí động học, thuật toán tối ưu các tham số thiết kế theo lưu lượng cho
trước có ý nghĩa quan trọng trong việc phát triển và hoàn thiện lý thuyết
thiết kế các loại bơm này trong các hệ thống bôi trơn của động cơ đốt trong.
Ngoài ra, các kết quả nghiên cứu của luận án cũng góp phần đem lại những
nhận thức mới về việc tối ưu cũng như tính toán thiết kế các loại bơm
Hypôgerôto mà nhiều công trình nghiên cứu trước đây chưa được nhìn
nhận một cách đầy đủ.
4.2. Ý nghĩa thực tiễn
Các điều kiện biên được đưa ra bởi luận án như: điều kiện hình thành
biên dạng răng, điều kiện mòn đều biên dạng răng theo tiêu chí động học,
điều kiện để đẩy hết dầu trong mỗi vòng quay, điều kiện tránh va chạm
giữa rôto trong và rôto ngoài v.v.. đã làm cho thuật toán tối ưu được nhanh
hơn, kết quả thiết kế chính xác hơn mà không cần phải có các giải pháp phụ
như rãnh hồi dầu cũng như góp phần nâng cao tuổi thọ của bơm.
Kết quả bài toán tối ưu của luận án đã thiết kế ra được một số bơm bôi
trơn có kích thước nhỏ hơn mà vẫn đáp ứng được yêu cầu về lưu lượng, áp
suất và chất lượng dòng chảy cũng như áp suất đầu ra của bơm. Do đó, các
kết quả nghiên cứu của luận án có ý nghĩa thực tiễn cao trong việc phát
triển các loại bơm Hypôgerôto trong các hệ thống bôi trơn nói chung và hệ
thống bôi trơn của động cơ đốt trong nói riêng.
5. Những đóng góp của luận án
3
Với mục tiêu đã đề ra luận án đã có những đóng góp chính cụ thể như sau:
i) Về mặt lý thuyết thiết kế hình học luận án đã nghiên cứu tìm ra
được các điều kiện biên hình thành biên dạng cặp rôto của bơm
Hypôgerôto nhằm giải quyết triệt để các hiện tượng: nhọn đỉnh
răng, cắt lẹm chân răng, giao thoa đỉnh răng và cạnh răng, tránh va
chạm, kẹt răng mà các nghiên cứu khác cho đến thời điểm hiện tại
chưa giải quyết được triệt để.
ii) Đã tìm ra công thức tính chính xác bán kính đỉnh răng rôto trong
nhằm đảm bảo điều kiện mòn đều hai biên dạng đối tiếp theo tiêu
chí động học nhằm góp phần nâng cao tuổi thọ của bơm
Hypôgerôto.
iii) Đưa ra được thuật toán xác định chính xác bán kính chân răng bánh
răng trong nhằm đảm bảo bơm được thiết kế đúng với lưu lượng
cho trước nhằm đảm bảo không bị hụt lưu lượng so với thiết kế mà
cũng không bị thừa chất lỏng có hại cho máy.
iv) Xây dựng được thuật toán tối ưu các tham số thiết kế đặc trưng
theo lưu lượng cho trước nhằm đảm bảo kích thước nhỏ nhất.
6. Phƣơng pháp nghiên cứu của luận án
Để đạt được mục tiêu đề ra phương pháp nghiên cứu của luận án là kết
hợp giữa nghiên cứu lý thuyết với thực nghiệm đo đạc trên thiết bị thí
nghiệm để kiểm chứng lý thuyết, cụ thể là:
i) Tìm hiểu phân tích tổng hợp các tài liệu khoa học, các công trình
nghiên cứu mới nhất về lĩnh vực bơm TLTT bánh răng ăn khớp
trong (BRAKT) biên dạng xyclôít. Để từ đó phân tích đánh giá ưu
nhược điểm của các phương pháp nghiên cứu đã có, trên cơ sở đó
kế thừa những trí thức hiện đại cập nhật nhất của nhân loại về lĩnh
vực lý thuyết ăn khớp của bánh răng xyclôít mà luận án quan tâm
để tiếp tục nghiên cứu, phát triển và hoàn thiện những vấn đề còn
tồn đọng chưa giải quyết được hoặc chưa được quan tâm trong lĩnh
vực bơm bôi trơn kiểu Hypôgerôto tính đến thời điểm hiện tại.
ii) Chế tạo mẫu bơm thử nghiệm theo kết quả nghiên cứu lý thuyết
của luận án và xây dựng phương pháp đo. Từ đó tổ chức triển khai
thí nghiệm để kiểm chứng các kết quả nghiên cứu lý thuyết cũng
như khảo sát đánh giá chất lượng của bơm được chế tạo như: xây
dựng đường đặc tính, khảo sát dao động lưu lượng của bơm theo
độ nhớt và tốc độ quay.
4
7. Bố cục luận án
Luận án được trình bày trong 4 chương với nội dung cụ thể như sau:
Chương 1. Tổng quan về bơm thủy lực thể tích bánh răng xyclôít ăn
khớp trong: Trình bày tổng quan về quá trình phát triển của bơm thủy lực
thể tích bánh răng ăn khớp trong biên dạng xyclôít cũng như những ứng
dụng của loại bơm này. Ngoài ra, tổng hợp phân tích đánh giá các kết quả
nghiên cứu trong và ngoài nước về lĩnh vực bơm bánh răng xyclôít ăn khớp
trong, trên cơ sở đó xác định các nhiệm vụ nghiên cứu của luận án.
Chương 2. Xác định điều kiện hình thành biên dạng cặp rôto: Trình
bày về thiết lập mô hình toán học, mô tả biên dạng răng của hai rôto (rôto
trong và rôto ngoài). Trên cơ sở đó xác định các điều kiện biên hình thành
biên dạng rôto và hiện tượng trượt biên dạng trong quá trình ăn khớp. Từ
đó, xác định điều kiện để hai biên dạng đối tiếp mòn đều theo tiêu chí động
học nhằm góp phần nâng cao tuổi thọ của bơm.
Chương 3. Tối ưu các thông số thiết kế đặc trưng theo lưu lượng:
Trình bày phương pháp thiết lập mô hình tính toán học xác định lưu lượng
của bơm. Từ đó kết hợp với cơ sở lý luận đã được xây dựng ở chương 2 để
thiết lập giải thuật tối ưu các thông số kích thước thiết kế theo lưu lượng
cho trước nhằm đảm bảo kích thước nhỏ nhất.
Chương 4. Thí nghiệm kiểm chứng lưu lượng và xác định đường
đặc tính của bơm bánh răng hypôgerôto: Trình bày sơ đồ nguyên lý đo
lưu lượng, áp suất và các kết quả thí nghiệm đo lưu lượng, áp suất trên một
số bơm mẫu được chế tạo theo kết quả nghiên cứu của luận án. Từ đó bàn
luận, thảo luận đánh giá kiểm chứng tính chính xác của cơ sở lý luận và
thuật toán mà luận án đã đưa ra.
Kết luận và kiến nghị: Tóm tắt những kết quả đạt được và những đóng góp
mới của luận án, bàn luận về khả năng ứng dụng những kết quả nghiên cứu
của luận án vào thực tế cũng như kiến nghị hướng phát triển tiếp theo của
luận án
5
Chƣơng 1
TÌNH HÌNH NGHIÊN CỨU TRONG VÀ NGOÀI NƢỚC VỀ VỀ BƠM
THỦY LỰC THỂ TÍCH BÁNH RĂNG XYCLÔÍT ĂN KHỚP TRONG
1.1 Bơm thủy lực thể tích bánh răng xyclôít ăn khớp trong
Như đã trình bày trong phần mở đầu bơm bánh răng ăn khớp trong có
biên dạng xyclôít là loại máy thủy lực thể tích (TLTT) kiểu rôto (RT) được
phát minh lần đầu tiên bởi M. F. Hill vào năm 1920 cho đến nay vẫn đang
được sử dụng phổ biến trong các hệ thống bôi trơn và các hệ thống trợ lực
của ôtô, xe máy hiện đại
1.2 Cấu tạo và nguyên lý hoạt động
Như đã trình bày ở trên về mặt
cấu tạo thành phần chính của bơm
là cặp RT biên dạng xyclôít ăn
khớp trong (xem hình 1.4). Nếu
RTT có biên dạng là các cung tròn
thì TRN có biên dạng là đường
hypôxyclôít kéo dài hình 1.4a Hình 1.4 Cấu tạo của bơm bánh răng xyclôít
(bơm hypôgerôto), còn nếu RTN
có biên dạng là các cung tròn thì RTT có biên dạng là đường epixyclôít keo
dài hình 1.4b (bơm gerôto).
1.3. Tình hình nghiên cứu trong và ngoài nƣớc
Bơm TLTT bánh răng ăn khớp trong biên dạng xyclôít là loại máy thủy
lực thể tích kiểu
RT được phát
minh lần đầu tiên
vào năm 1920
[1]. Từ đó, trong
và ngoài nước đã
có rất nhiều các
nghiên cứu về Hình 1.8 Tổng hợp các nghiên cứu về bơm TLTT bánh răng ăn
khớp trong biên dạng xyclôít theo 10 năm gần đây
loại bơm này.
Tuy nhiên, ở thời gian đầu số lượng nghiên cứu về loại bơm bị hạn chế ít
được các nhà khoa học quan tâm, những trong nhưng năm gần đây lĩnh vực
này lại có nhiều nhà khoa học quan tâm điều này minh chứng bởi số lượng
6
nghiên cứu được công bố (xem hình 1.8)
1.4 Tình hình nghiên cứu trong và ngoài nƣớc về bơm TLTT
bánh răng ăn khớp trong biên dạng xyclôít
1.4.1 Tình hình nghiên cứu ngoài nƣớc về bơm TLTT
a) Nghiên cứu về biên dạng rôto
Biên dạng rôto là một trong các vấn đề luôn được các nhà nghiên cứu trong
và ngoài nước quan tâm, cho đến nay việc mô hình hóa biên dạng cặp bánh
răng xyclôít được tiếp cận bằng nhiều hướng nghiên cứu khác nhau như: (i)
Biên dạng xyclôít thông thường; (ii) Biên dạng xyclôít cải tiến; (iii)Biên
dạng xyclôít đặc biệt
b) Nghiên cứu lƣu lƣợng và áp suất
Lưu lượng và áp suất là các vấn đề đặc biệt quan trọng đối với bơm
TLTT nói chung và bơm TLTT bánh răng ăn khớp trong biên dạng xyclôít
nói riêng. Các vấn đề nghiên cứu: (i) nghiên cứu xác định lưu lượng, áp
suất của bơm; (ii) nghiên cứu ảnh hưởng của kích thước khe hở đến lưu
lượng, áp suất; (iii) nghiên cứu cải tiến biên dạng cặp rôto để tăng lưu
lượng của bơm
c) Khe hở giữa các chi tiết chuyển động và vị trí cửa vào ra trên thân
bơm
Các nghiên cứu trên mới chỉ đề xuất các phương pháp mô hình hóa
biên dạng cặp rôto và công thức lý thuyết xác định lưu lượng, áp suất mà
chưa thể hiện được sự kết hợp giữa lý thuyết với các vấn đề chế tạo thực
nghiệm như: sai số gia công chế tạo, khe hở cạnh răng giữa các cặp răng
đối tiếp, khe hở mặt đầu rôto với thân bơm, vị trí cửa vào ra của dòng chất
lỏng v.v.. đây đều là các yếu tố có ảnh hưởng trực tiếp đến lưu lượng và áp
suất của bơm TLTT nói chung và bơm Gerôto nói riêng.
1.4.2 Tình hình nghiên cứu trong nƣớc về bơm TLTT bánh răng ăn
khớp trong biên dạng xyclôít
Bơm thủy lực thể tích bánh răng ăn khớp trong biên dạng xyclôít đã
được giới thiệu trong giáo trình nguyên lý máy chuyên nghiệp năm 1970
[119]. Tuy nhiên, các nhà khoa học trong nước chủ yếu tập trung vào
nghiên cứu ứng dụng cặp bánh răng epixyclôít trong thiết kế các bộ truyền
động (hộp giảm tốc) ở các khớp quay của robot hay các bộ truyền động của
máy điều khiển số điển [121-125] còn ứng dụng trong thiết kế bơm TLTT
7
thì hầu như chưa được quan tâm đúng mức chỉ có một vài công trình
nghiên cứu về loại bơm bánh răng thủy lực thể tích biên dạng epixyclôít
của Nguyễn Đức Hùng [120].
Kết luận chƣơng 1
Từ những tổng hợp, phân tích đánh giá trên đây cho thấy từ khi bắt đầu
xuất hiện cho đến nay có rất nhiều các nghiên cứu chuyên sâu về bơm
TLTT như:
(1) Về biên dạng: nghiên cứu phương trình biên dạng và đặc điểm ăn khớp
của cặp bánh răng ăn khớp trong biên dạng epixyclôít và hypôxyclôít đã
được nhiều nhà nghiên cứu trong và ngoài nước quan có thể thống kê thành
ba phương pháp phổ biến là: (i) tâm vận tốc tức thời; (ii) phương pháp bao
hình; (iii) phương pháp hình học giải tích. Nhưng chủ yếu là nghiên cứu về
đặc điểm hình thành biên dạng răng phục vụ thiết kế các loại hộp giảm tốc
bánh răng chốt con lăn epixyclôít hoặc bơm Gerôto còn các loại bánh răng
hypôxyclôít gần đây mới được nghiên cứu ứng dụng bởi Kwon và đồng
nghiệp (2010) [30] bằng phương pháp tâm vận tốc tức thời. Trong nghiên
cứu của Kwon cũng chỉ mới đưa ra được giới hạn của các thông số đặc
trưng: R1 min , rcl max , Rmin để thỏa mãn điều kiện tránh hiện tượng giao thoa
đỉnh răng của bánh răng hypôxyclôít trong quá trình hình thành bơm
Hypôgeroto, còn những vấn đề như: va chạm giữa rôto trong và rôto ngoài
gây kẹt răng, nhọn đỉnh răng của rôto trong, giới hạn cung ăn khớp của
đỉnh răng rôto trong và sự chồng lấn biên dạng chân rôto trong lên phần
cung ăn khớp của đỉnh rôto trong cũng chưa được xét đến mà được nhận
dạng và kiểm tra bằng kinh nghiệm, cho đến hiện tại các nghiên cứu cũng
chưa đưa ra được điều kiện để xác định cụ thể để cân bằng hệ số trượt mà
mới chỉ phân tích và thay đổi các tham số một cách thủ công hoặc đưa ra
các thuật toán để tìm ra được các bộ thông số thiết kế đặc trưng nhằm giảm
thiểu vận tốc trượt tương đối để hai biên dạng đối tiếp mòn đều theo tiêu
chí động học. Do đó, đây là một vấn đề mà luận án sẽ giải quyết ở chương
2 để hoàn thiện lý thuyết thiết kế bơm Hypôgeroto.
(2) Về lưu lượng: việc xác định lưu lượng lý thuyết ( Qlt ) trong bài toán
thiết kế bơm là rất quan trọng. Giải quyết vấn đề này đã có rất nhiều nhà
nghiên cứu đưa ra các giải pháp, phương pháp khác nhau như: (1) Phương
pháp xác định diện tích khoang bơm; (2) Phương pháp giải tích, phương
pháp này lại được chia thành các phương pháp đó là: (i) Tính toán lưu
8
lượng lý thuyết theo phương pháp bảo toàn công và (ii) Tính toán lưu
lượng lý thuyết dựa theo đường ăn khớp đây là phương pháp hiện đại nhất
và được các nghiên cứu sử dụng nhiều nhất. Tuy nhiên, có một vấn đề mà
hầu hết các nghiên cứu mắc phải đó là chỉ quan tâm đến các thông số đặc
trưng hình thành bánh răng xyclôít (epixyclôít hoặc hypôxyclôít) làm rôto
của bơm mà chưa quan tâm đến thông số liên kết các răng (bán kính đỉnh
răng hoặc chân răng) của bánh răng đối tiếp với bánh răng xyclôít. Điều đó
dẫn đến ngay từ khâu thiết kế đã gặp phải các hiện tượng: (a) Đọng lượng
dầu dư thừa không đẩy hết ra khỏi bơm; (b) Thiếu hụt lưu lượng so với lý
thuyết ngay từ khâu thiết kế, hiện tượng này sẽ được luận án chỉ ra ở
chương 3.
Ngoài ra, từ việc tổng hợp lại các nghiên cứu về bơm thủy lực thể tích
bánh răng xyclôít ăn khớp trong cho thấy, các kết quả nghiên cứu trên nếu
áp dụng cho bơm Gerôto có biên dạng cặp bánh răng là đường epixyclôít
được hình thành từu bốn thông số thiết kế đặc trưng {E, z2, R2, rcl} thì
không có vấn đề gì về các kết quả tính toán nhưng đối với bơm hypôgerôto
có biên dạng cặp bánh răng là đường hypôxyclôít được hình thành từ năm
thông số thiết kế đặc trưng {E, z1, R1, rcl, R} sẽ gặp phải một số vấn đề về
biên dạng cặp bánh răng hypôxyclôít và lưu lương bơm đó là:
i) Giới hạn của bán kính chân răng (R) của bánh răng trong để tránh
hiện tượng không hình biên dạng bánh răng trong và chèn răng trong
quá trình ăn khớp.
ii) Các biểu thức tính lưu lượng lý thuyết theo các phương pháp đường ăn
khớp, bảo toàn công không kể đến thông số. Câu hỏi đặt ra bán kính R
có ảnh hưởng tới như thể nào đến thể tích khoang bơm và lưu lượng
bơm.
iii) Các thông số hình thành biên dạng cặp bánh răng hypôxyclôít ảnh
hưởng như thế nào đến tốc độ mòn của hai bánh răng
iv) Đưa ra được thuật toán xác định chính xác bán kính chân răng bánh
răng trong nhằm đảm bảo bơm được thiết kế đúng với lưu lượng cho
trước không bị hụt lưu lượng so với thiết kế mà cũng không bị thừa
chất lỏng có hại cho máy.
Đây là những vấn đề mà luận án sẽ giải quyết để hoàn thiện về mặt lý
thuyết thiết kế bơm TLTT bánh răng ăn khớp trong biên dạng xyclôít nói
chung và bơm Hypôgerôto nói riêng.
9
Chƣơng 2
NGHIÊN CỨU XÁC ĐỊNH CÁC ĐIỀU KIỆN HÌNH THÀNH CẶP BIÊN
DẠNG RÔTO THEO CÁC THÔNG SỐ THIẾT KẾ ĐẶC TRƢNG
2.1 Thiết lập phƣơng trình
toán học mô tả biên dạng
răng
2.1.1 Phƣơng trình toán học
mô tả biên dạng bánh răng
ngoài
Nếu gọi, 1 rK1 j ( i ) là véc tơ xác
định điểm K1j thuộc biên dạng
rôto trong xét trong hệ quy
chiếu 1 ta có:
1
Hình 2.1 Cặp biên dạng đối tiếp
rK1 j ( i ) [ R1 rcl cos ( i ) rcl sin ( i ) 0]T
(2.9)
Khi đó, đưa tọa độ điểm K1j trong hệ quy chiếu 1 về hệ quy chiếu 2 sau
khi biên đổi ta có phương trình biên dạng rôto ngoài và cho bởi
2
i
z
) rcl cos ( i ) i E cos( 1 i )
x K 2 j ( i ) R1 cos(
z1 1
z1 1
z1 1
i
i
z 1 i
2
y K 2 j ( i ) R1 sin( z 1) rcl sin ( i ) z 1 E sin( z 1)
1
1
1
(2.13)
2.1.2 Bán kính cong của biên dạng rôto ngoài
Để xác định bán kính cong biên dạng rôto ngoài ta gọi o ( i ) là bán kính
cong tại điểm tiếp xúc Kj của đường hypôxyclôít kéo dài thì theo lý thuyết
hình học vi phân [126] ta có:
o ( i )
r1 2 1 2 cos i
3/ 2
(2.26)
z1 2 ( z1 1) cos i
Nếu gọi ( i ) là bán kính cong của biên dạng hypôxyclôít thì ta có:
( i ) o ( i ) rcl
r1 2 1 2 cos i
3/ 2
z1 2 ( z1 1) cos i
rcl
(2.27)
2.1.3 Biên dạng rôto trong (bánh răng cung tròn)
Để hình biên dạng rôto trong liên kết các con lăn bằng các cung tròn
tiếp xúc với các đường tròn đỉnh răng liên tiếp để hình thành bánh răng
10
trong như được mô tả ở
hình 2.4b. Như vậy, thông
số thiết kế của rôto trong
được cho bởi { R1 , rcl , R }
2.2 Xác định điều kiện
hình thành biên dạng
cặp rôto của bơm
Hypôgerôto
2.2.1 Xác định miền giới
hạn của thông số thiết kế
đặc trƣng R1
Hinh 2.4 Biên dạng rôto trong
Xác định giới hạn nhỏ nhất của R1
R1 min (rcl2 ( z1 1) 3 )(27( z1 1)) 1 Ez1
2
(2.57)
Xác định giới hạn lớn nhất của R1
R1 max (2 z1 1)(z1 2) 1 Ez1
(2.59)
2.2.2 Xác định miền giới hạn của thông số thiết kế đặc trƣng rcl
Xác định giá trị lớn nhất của rcl
3/ 2
(2.63)
Ez1 2 R12 ( Ez1)2 ( z1 1)
rcl max Ez1 3( z1 11 )
Xác định giá trị nhỏ nhất của rcl
rcl min 0
(2.66)
2.2.3 Xác định miền giới hạn của thông
số thiết kế đặc trƣng R
Cung tròn chân răng bánh răng trong có
bán nhỏ nhất khi điểm tiếp xúc Gj Ej
(2.71)
R min R E R1 sin rcl
j
z1
Cung tròn chân răng có bán kính lớn nhất
khi điểm tiếp xúc Gj A1j.
tg 2 1 rcl (2.78)
Rmax R A1 j R1 sin
z1
Để tránh hiện tượng chèn răng thì bán Hình 2.7 Giới hạn làm việc của
đỉnh răng rôto trong
kính chân răng R của rôto trong phải nhỏ
hơn bán kính đỉnh răng của rôto ngoài (xem hình 2.10). Khi đó, ta có:
11
R 1
R1 Ez1 2 r
Ez12 R1
cl
(2.80)
Từ (2.71), (2.78), (2.80) ta có:
R1 sin
z1
rcl R
R1 Ez1 2
Ez12 R1
rcl (2.82)
Hình 2.10 Ăn khớp của 2 bánh
răng khi chưa xảy ra va chạm
2.3 Đƣờng ăn khớp
2.3.1 Thiết lập phƣơng trình đƣờng ăn khớp
Đường ăn khớp của cặp bánh răng hypôxyclôít
là quỹ tích các điểm tiếp xúc Kj giữa các cặp
biên dạng đối tiếp trong quá trình ăn khớp và
được cho bởi:
3 xK ( i ) R1 cos i rcl cos( i i ) E
j
3
yK j ( i ) R1 sin i r cl sin( i i )
(2.84)
2.3.2 Bán kính ăn khớp
Nếu gọi Ki ( i ) là bán kính ăn khớp tại
Hình 2.12 đường ăn khớp của
cặp bánh răng hypôxyclôít
điểm ăn khớp thứ j (khoảng cách từ tâm ăn
khớp P tới điểm ăn khớp thứ Ki ta có:
K j ( i ) [ 3 rK j ( i ) 3 rP ]T [ 3 rK j ( i ) 3 rP ]
(2.85)
2.4 Hiện tƣợng trƣợt biên dạng
2.4.1 Vận tốc điểm ăn khớp
Vận tốc của điểm K1j và K2j
(hình 2.15) được cho bởi tại
điểm ăn khớp:
v K1 j ( i ) 1 rK1 j ( i )
v K 2 j ( i ) 2 rK 2 j ( i )
(2.88)
Chiếu phương trình (2.88) lên
phương tiếp tuyến tt ta có
(xem):
vKt ( i ) 1rK ( i ) cos[1 j ( i )] (2.93
1j
1j
t
vK 2 j ( i ) 2 rK 2 j ( i ) cos[ 2 j ( i )]
Hình 2.15 Sơ đồ tính vận tốc trượt tại điểm ăn
khớp Kj
Nếu gọi vtr12 ( i ) , vtr21 ( i ) lần lượt là vận tốc trượt tương đối RTT với RTN
và của RTN so với RTT. Khi đó, ta có:
12
vtr12 ( i ) v Kt 1i ( i ) v Kt 2i ( i )
vtr21 ( i )
v Kt 2i
(
t
i ) v K1i
( i )
(2.94)
(2.95)
2.4.2 Đƣờng cong trƣợt
Để đánh giá quá trình mòn của hai biên dạng đối tiếp ta gọi 1 j ( i ),
2 j ( i ) lần lượt là hệ số trượt của rôto trong và rôto ngoài:
Vtr1 2 ( i )
1i ( i ) t
V
K1 j ( i )
( ) Vtr2 1 ( i )
2i i
VKt 2 j ( i )
(2.96)
2.5 Ảnh hƣởng của các thông số thiết kế đặc trƣng đến các
đƣờng cong trƣợt biên dạng
Do hai thông số E và z1 biết trước nên để đánh giá ảnh hưởng của các
thông số còn lại đến biên dạng bánh răng hypôxyclôít và đỉnh răng của rôto
trong ta đánh giá qua hai hệ số: hệ số hypôxyclôít (với R1 ( Ez1 ) 1 ),
và hệ số bán kính đỉnh răng c (với c rcl ( E ) 1 ).
Từ việc khảo sát ảnh hưởng của , c ta thấy:
i) Hình dáng hình học của đường ăn khớp không phụ thuộc nhiều vào hệ
số c tức bán kính đỉnh răng của bánh răng trong.
ii) Khi kích thước R1 lớn thì đường ăn khớp tiến dần về đường tròn nhưng
sẽ làm tăng kích thước hướng kính. Khi cặp ( , c ) trong miền giới hạn
hình thành biên dạng nếu lấy nhỏ và c lớn sẽ gặp phải hiện tượng
chèn răng (kẹt rôto khi làm việc).
iii) Thông qua các đánh giá ở mục 2.6 cho thấy hệ số c ảnh hưởng đến hệ
số trượt nhiều hơn hệ số , điều này có nghĩa người thiết kế ưu tiên
hiệu chỉnh rcl để giảm hiện tượng trượt tức là hiệu chỉnh hệ số c .
2.6 Tối ưu các kích thước thiết kế đặc trưng để cặp biên dạng đối tiếp
mòn đều xét về mặt động học
Theo đặc điểm ăn khớp của cặp bánh răng hypôxyclôít bánh răng trong
chỉ tham gia ăn khớp trên một phần cung tròn đỉnh răng nên đường cong
trượt 1 ( i ) luôn mang giá trị dương, còn đường cong trượt 2 ( i ) luôn
mang giá âm. Để hai biên dạng đối tiếp mòn đều trong quá trình ăn khớp
13
thì cần giảm thiểu biểu thức 1max ( i ) 2 min ( i ) 0 . Khi đó để hai biên
dạng đối tiếp mòn đều thì rcl ( z1 1) E R1 .
2.7 Xác các thông số chế tạo rôto theo các thông số thiết kế
đặc trƣng hình thành biên dạng cặp rôto cấu thành bơm
hypôgerôto
2.7.1 Xác định thông số kích thƣớc
rôto trong
Rđ 1 R1 rcl
(2.108)
(2.112)
1
Rc1 2 ( Rđ 1 Rch1 )
2.7.2 Xác định thông số kích thƣớc
thiết kế rôto ngoài theo thông số kích
thƣớc đặc trƣng
Rđ2 = E + R1 + rcl
(2.115)
(2.117)
Rch2 R1 rcl - E
Kết luận chƣơng 2
Từ những phân tích đánh giá và thảo luận chương này của luận án đã
có những đóng góp sau về mặt lý thuyết thiết kế động học cho loại bơm bôi
trơn kiểu biên dạng hypôxyclôít:
i) Kế thừa và giải quyết triệt để các điều kiện của các thông số thiết
kế đặc trưng để hình thành biên dạng cặp rôto (cặp bánh răng
hypôxyclôít) cấu thành bơm hypôgerôto đó là:
Ez1 2 R12 ( Ez1 )2 ( z1 1)
1
2
1
rcl2 ( z1 1)3 27( z1 1) Ez1 R1 Ez1 2 z1 1z1 2
0 rcl Ez1 3( z1 11 )
R1 sin
z1
3/ 2
rcl R R1 Ez1 Ez12 R1
2
1
rcl
ii) Đưa ra được biểu thức xác định chính xác bánh kính cung tròn đỉnh
răng của rôto trong (bánh răng trong) để hai biên dạng mòn đều
theo tiêu chí động học rcl ( z1 1) E R1 .
14
Chƣơng 3
TỐI ƢU CÁC THÔNG SỐ THIẾT KẾ ĐẶC TRƢNG
THEO LƢU LƢỢNG
3.1 Các khái niệm và định nghĩa về lƣu lƣợng
Lưu lượng (Q) là một trong hai thông số quan trọng của các loại bơm
thủy lực thể tích nói chung và bơm TLTT bánh răng ăn khớp trong biên
dạng xyclôít nói riêng, thông số này thể hiện cho lượng chất lỏng được
bơm đẩy ra khỏi bơm trong một đơn vị thời gian.
3.2 Thiết lập công thức tính lƣu lƣợng lý thuyết của bơm
Hypôgerôto theo đƣờng ăn khớp của cặp bánh răng cấu thành
bơm
Nếu gọi V j ( i ) là thể tích khoang bơm thứ j thì ta có:
V j ( i ) V j N ( i ) V jT ( i )
(3.5)
Mặt khác, gọi S jLT ( i ) là diện
tích khoang bơm thứ j (hinh 3.2)
V j ( i ) bS jLT ( i ) (3.6)
Với cách sơ đồ hóa các miền
diện tích và miền diện ta có:
S jLT ( i ) S jT ( i ) S jN ( i ) (3.7)
Hình 3.2 Sơ đồ mô tả cách tính SjLT(i)
Trong đó, các miền diện tích
S jT ( i ), S jN ( i ) được xác định:
d S jT ( i ) 2 1 rO21K j1 ( i ) rO21K j ( i ) d i
(3.15)
d S jN 2 2 rO22K j ( i ) rO22K j1 ( i ) d ( i )
(3.30)
Khi đó, ta có biến thiên diện tich khoang bơm
2
1 2
2
2
d V j ( i ) 21b
rO1K j1 ( i ) rO1K j ( i ) z1 ( z1 1) rO 2 K j1 ( i ) rO 2 K j ( i ) d i
Sau khi biến đổi (3.32) ta có:
(3.32)
(3.41)
(3.45)
2
2
d V j ( i ) 21b( z1 1)1 PK
( i ) PK
( i ) d i
j 1
j
Lưu lượng trung bơm (lưu lượng bơm)
( z1 1)( z1 ) 1
Qltak nz1
2
( z1 )
1
2
2
( z1 1) 1 b PK
( i ) PK
( i ) d i
j 1
j
1
15
3.3 Thiết lập công thức xác định quy luật biến thiên thể tích
khoang bơm theo góc quay của trục dẫn động
Như đã trình bày trong mục 2.1 ở chương 2 của luận án để hình thành
rôto trong phải có thông số đặc trưng bán kính chân răng R . Nhưng trong
biểu thức tính lưu lượng bằng phương pháp lý thuyết được trình bày ở mục
3.2 lại chỉ có 4 thông số đặc trưng { E , z1 , R1 , rcl } do đó trong phần này
của luận án tiến hành thiết lập biểu thức tính diện tích tiết diện thực khoang
bơm SjGT(i) theo góc quay của tục dẫn động nhằm hai mục đích:
i) Chỉ ra những vấn đề mà phương pháp tính lưu lượng bằng đường ăn
khớp còn thiếu sót cần phải khắc phục.
ii) Phục vụ xây dựng thuật toán xác định bán kính R được trình bày ở
mục 3.5 của luận án.
3.3.1 Thiết lập phƣơng trình xác định miền diện tích khoang bơm theo
góc quay của trục dẫn động
Nếu gọi S jGT ( i ) là diện tích khoang thứ j được giới hạn bởi biên dạng
của hai cặp răng đối tiếp (xem hình )
S jGT ( i ) S2j( i ) S1j( i )
(3.47)
Trong đó, miền diện tích
S 2j ( i ) là miền diện tích
hình thang cong giới hạn
bởi biên dạng rôto ngoài
và được cho bởi:
Hình 3.7 Sơ đồ mô tả cách tính miền diện tích
SjGT(i)
S2 j ( i )
i 1 ( i )
xrh ( i )
i ( i )
yrh ( i ) ( i )
i
d i
(3.49)
Còn để xác định S1 j ( i ) thông qua việc chia nhỏ
miền diện tích này (xem hình 3.9):
S1 j ( i ) S11 j ( i ) S12 j ( i ) S13 j ( i ) (3.51)
Các miền diện tích ở về phải phương trình (3.51)
được cho bởi:
(3.52)
S11 j ( i ) 21 xK j ( i ) yK j ( i )
S13 j ( i ) 21 xK j 1 ( i ) yK j1 ( i )
16
(3.53)
Hình 3.9 Sơ đồ tính S1j(i)
S12 j ( i ) 21 rcl R1 sin sin j 1 ( i ) rcl2 j 1 ( i )
Rl sin R 2 rcl R1 sin sin ( i )
1
2
21 rcl2
( i )
(3.70)
Khi đó, diện tích khoang bơm S jGT ( i ) và thể tích khoang bơm V jGT ( i ) :
S jGT
i 1 ( i )
i (
xrh ( i )
y rh ( i ) ( i )
i)
i
d
1
x K j ( i ) y K j ( i ) x K j 1 ( i ) y K j 1 ( i )
2
(3.72
)
1
rcl R1 sin sin j 1 ( i ) rcl2 j 1 ( i )
2
1
1
Rl sin R 2 rcl R1 sin sin ( i ) rcl2 ( i )
2
2
i 1 ( i )
y r ( ) ( i )
1
d x K j ( i ) y K j ( i ) x K j 1 ( i ) y K j 1 ( i )
V jGT b xrh ( i ) h i
( )
2
i
i i
1
brcl R1 sin sin j 1 ( i ) rcl2 j 1 ( i )
2
1
1
Rl sin R 2 rcl R1 sin sin ( i ) rcl2 ( i )
2
2
(3.73
)
3.3.2 Đánh giá ảnh hƣởng của thông số R đến hiện tƣợng hụt hoặc
thừa lƣu lƣợng thiết kế so với lý thuyết ăn khớp
Để đánh giá ảnh hưởng của thông số bán kính chân răng rôto trong R
đến lưu lượng thiết kế bơm. Xét bơm bôi trơn của động cơ xăng hãng
Honda có dung tích 100CC với bốn thông số thiết kế đặc trưng: E 1mm,
z1 7 , R1 7.5mm , rcl 1.5mm còn thông số R được chọn trong ba
trường hợp sau: (1) R =2mm; (2) R= 2.5mm; (3) R = 3mm.
Từ những phân tích đánh giá ở trên ta nhận thấy với một bộ thông số thiết
kế đặc trưng gồm bốn thông số { E , z1 , R1 , rcl } thì khi tính lưu lượng
trung bình của bơm theo lý thuyết ăn khớp sẽ có một giá trị lưu lượng trung
bình xác định. Tuy nhiên, trong thực tế thiết kế để hình thành rôto trong
còn thông số R (bán kính chân răng rôto trong) thì bán kính này phải thỏa
mãn điều kiện nào để không xảy ra hiện tượng thừa hoặc hụt lưu lượng của
bản thiết kế so với lý thuyết đã tính toán xác định vấn đề này cho đến hiện
tại chưa có một tác giả nào quan tâm và thường được bỏ qua trong thiết kế
cũng như tối ưu. Để giải quyết vấn đề này, luận án đưa ra thuật toán ở như
trong các mục dưới đây.
3.4 Thuật toán xác định bốn thông số thiết kế đặc trƣng {E, z1,
R1, rcl} theo lƣu lƣợng cho trƣớc
3.4.1 Sơ đồ thuật toán
17
Hình 3.18 Thuật toán tối ưu tìm các thông số thiết kế đặc
trưng theo lưu lượng Qtk cho trước
Để thực hiện mục tiêu mà luận án đã đề ra, trong phần này ứng dụng
phương pháp xác định lưu lượng lý thuyết theo phương pháp đường ăn
khớp đã được thiết lập ở mục 3.2 và các điều kiện hình thành biên dạng đã
được xác định ở chương 2 để xây dựng thuật toán tìm các thông số { E , z1 ,
18
R1 , rcl } theo Qtk cho trước được trình bày trong hình 3.18 dưới đây với
mục đích:
(1) Tìm tất cả các bộ thông số { E , z1 , R1 , rcl } thỏa mãn các điều kiện hình
thành biên dạng cặp rôto và thỏa mãn tiêu chí mòn đều động học ở
chương 2 và đạt được lưu lượng thiết kế Qtk cho trước.
(2) Từ các bộ thông số đã tìm được ở trên tìm ra bộ thông số có kích thước
hướng kính nhỏ nhất Rch được cho bởi công thức 2.116 ở chương 2.
Với sai số tính toán Q được đưa vào để thuật toán hội tụ nghiệm và gia
số R1 để xác định độ min của thuật toán.
3.4.2 Ứng dụng thuật toán trong thiết kế bơm bôi trơn động cơ
Trên cơ sở thuật toán đã trình bày ở mục 3.4.1 trong phần này luận án tiến
hành tìm bộ thông số thiết kế đặc trưng { R1 , rcl } của các loại bơm bôi trơn:
Diesel D20 - SZ1110, Động cơ xe máy Honda 110CC, Động cơ xe máy
Honda 125CC khi cho trước các thông số trong bảng 3.1, để tiến hành chế
tạo thử nghiệm chạy thuật toán với R1 0.5mm và sai số
Q 0.005mm3 .
3.5 Thuật toán xác định thông số R theo các kích thƣớc đặc
trƣng {E, z1, R1, rcl} nhằm thỏa mãn điều kiện lƣu lƣợng cho
trƣớc
3.5.1 Sơ đồ thuật toán
Như đã trình bày trong mục đặt vấn đề thuật toán trình bày ở mục 3.4
chưa xác định được bán kính chân răng hình thành rôto trong { R }. Để xác
định bán kính R thỏa mãn thể tích khoang bơm thực trùng với thể tích
khoang bơm tính toán theo lý thuyết và các điều kiện R đã được xác định
trong mục 2.2.3 của luận án, trong nội dung này luận án đưa ra thuật toán
cụ thể như sau:
Bƣớc 1: Xác định diện tích tiết diện khoang bơm S jLT theo lưu lượng lý
thuyết đã được xác định ở mục 3.2.
S jLT 21 ( z1 1)1 ( PK j 1 )2 ( PK j )2 d
(3.74)
Từ (3.74) ta có diện tích lớn nhất của một khoang bơm theo lý thuyết
đã xác định theo 4 thông số { E , z1 , R1 , rcl }.
19
Bƣớc 2: Xác định diện tích thực của khoang bơm theo kích thước thiết kế
theo lý thuyết đã trình bày ở mục 3.3. Trong công thức tính phần diện tích
này có mặt thông số R và được gọi là S jGT được cho bởi (3.72)
Bƣớc 3: Quét từ Rmin tới Rmax trong quá trình quét số tính các giá trị
S jGT theo R và so sánh với S jGT với sai số S để thuật toán hội tụ, còn
R là gia số lặp của thuật toán. Hình 3.19 dưới đây là thuật toán tìm giá trị
R theo Q và { E , z1 , R1 , rcl }.
3.6.2 Ứng dụng thuật toán tìm R trong thiết kế biên dạng rôto của
bơm bôi trơn động cơ
Áp dụng thuật toán tìm R với S 0.01mm2 còn R 0.5mm ta tìm được
thông số thiết kế đặc trưng của rôto trong R theo diện tích khoang bơm và
các thông số đặc trưng của các bơm Hypôgerôto: Diesel D20 - SZ1110,
Động cơ xe máy Honda 110CC, Động cơ xe máy Honda 125CC
Chƣơng 4
THÍ NGHIỆM KIỂM CHỨNG VÀ XÂY DỰNG ĐƢỜNG ĐẶC TÍNH
CỦA BƠM HYPÔGERÔTO
4.1 Thiết kế chế tạo bơm bánh răng xyclôít ăn khớp trong (bơm
Hypôgerôto)
Với các kích thước thiết kế bơm được xác định theo cơ sở lý thuyết và
cho trong bảng 3.3 của luận án, tác giả tiến hành thiết kế và chế tạo các
mẫu bơm Hypôgerôto: (1) Động cơ xăng: Động cơ xe máy có dung tích
110CC và 125CC; (2) Động cơ dầu: Máy nông nghiệp D20 - SZ1110.
4.2 Thí nghiệm xác định lƣu lƣợng riêng của bơm
Sơ đồ thiết bị thí nghiệm đo lƣu lƣợng riêng của bơm
Mục đích của thí nghiệm này nhằm kiểm chứng thuật toán và phương
pháp luận của lý thuyết đã thực hiện trước đó. Để tổ chức thực hiện thí
nghiệm tác giả đã tiến hành chạy rà các mẫu bơm trong 48 giờ và tiến hành
căn chỉnh sau khi chạy rà trong các đồ gá đo (xem hình 4.1)
Trình tự thí nghiệm đo lƣu lƣợng riêng bơm
Từ kết quả thí nghiệm đo lưu lượng các mẫu bơm trên ta nhận thấy:
20
Lưu lượng đo ( QTN ) thực tế
nhỏ hơn lưu lượng lý thuyết
QLT sai số lưu lượng đo thực
tế so với lý thuyết là từ 1%
14
2
đến 7% điều này có thể
khẳng định độ tin cậy của lý
thuyết và thuật toán mà luận
15
2
án đã nghiên cứu tìm ra,
16
2
7 8
5
6
còn sai số giữa lý thuyết và 32 42
2 2
2
2
thí nghiệm là do trong biểu
9
2
thức tính lưu lượng chưa
xét đến khe hở cạnh răng,
10
2
2
khe hở mặt đầu và độ nhớt
11
12
13
2
1 M
2
2
2
của dầu chảy qua bơm
ii) Khi độ nhớt giảm thì tổn
thất do rò rỉ lưu lượng qua
khe hở cạnh răng và khe hở
Hình 4.1 Sơ đồ đo lưu lượng bơm
mặt đầu càng lớn dẫn đến
hiệu suất thể tích giảm và làm sai số tăng lên.
i)
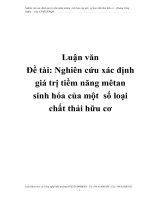
4.3 Thí nghiệm xác định đƣờng đặc tính của bơm
4.3.1 Sơ đồ thí nghiệm xác định đƣờng đặc tính
Hypôgerôto là một loại
bơm thủy lực thể tích nên
sau khi chế tạo cần phải
xác định đường đặc tính P
– Q theo các giá trị của Q
và P. Việc đo các giá trị
Q, P được thực hiện theo
sơ đồ hình 4.2
4.3.2
Trình tự thí
nghiệm
xác
định
đƣờng đặc tính
Để xác định đường
đặc tính của bơm sau khi
23
24
n
t
Q
P
t
1
16
S K j ( i )
21
22
20
19
17
18
3 4
6 7 8
5
9
2
10
2
2
11
2
12 13
2
14
15
1
M
Hình 4.2 Sơ đồ nguyên lý đo lưu lượng (Qđ), áp suất (P) bơm
theo thời gian (t)
21
chế tạo, thí nghiệm được tổ chức
thực hiện theo quy trình sau: tiến
hành gia tải thông qua van (14) từ
( P 0 , Qmax )
đến
P [bar]
3.50
3.00
2.50
( P Pmax , Q 0 ) với gia số gia tải
n=750
[vòng/phút]
Lưu lượng lý thuyết ở
tốc độ 1000 v/p
n=1000
[vòng/phút]
4.00
Lưu lượng lý thuyết ở
tốc độ 750 v/p
Lưu lượng lý thuyết ở
tốc độ 500 v/p
4.50
2.00
P 0.5bar (sau mỗi lần gia tải)
được gọi là một điểm đo. Tại mỗi
điểm đo số lần trích mẫu là 60 lần,
mỗi lần 1 giây và lấy giá trị trung
bình tại mỗi điểm đo.
1.50
1.00
n=500
[vòng/phút]
0.50
0.00
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Hình 4.3 Đường đặc tính của bơm bôi trơn
động cơ Honda 110CC khi thí nghiệm với dầu
bôi trơn SAE2
4.4 Thí nghiệm xác định dao động lƣu lƣợng của bơm
Ở trường hợp này quá trình thí nghiệm cũng được tiến hành khi dòng
chảy ổn định và đo trực tiếp sau bình điều hòa. Thí nghiệm xác định dao
động lưu lượng của bơm bôi trơn động cơ xe máy Hon da dung tích 110CC
SAE2
Q(l/p)
0.8
n=1000(vg/p)
P=1(bar)
0.7
SAE3
SAE2
0.6
0.5
n=750(vg/p)
P=1(bar)
0.4
SAE2
0.3
n=500(vg/p)
P=1(bar)
SAE3
0.2
0
10
20
30
40
60
50
t (phút)
Hình 4.10 Lưu lượng tức thời
0.35
0.30
0.25
0.20
0
500
750
Hình 4.11 Dao động lưu lượng
1000
SAE3
SAE2
SAE3
SAE2
0.10
0.05
SAE3
SAE2
0.15
n (vg/p)
Kết luận chƣơng 4
Từ những phân tích, đánh giá, thảo luận, thí nghiệm chương 4 của luận
án có những đóng góp cụ thể về mặt tối ưu thiết kế kiểu bơm bôi trơn biên
dạng hypôxyclôít, cụ thể như sau:
i) Tính đúng đắn của phương pháp luận và thuật toán đã nghiên cứu
ii) Đã xây dựng được đường đặc tính làm việc của bơm.
Qua thực nghiệm đã chỉ ra được để chất lượng dòng chảy ổn định (để mấp
mô thấp) thì cần chọn tốc độ làm việc của bơm ở tốc độ lớn.
22
KẾT LUẬN VÀ KIẾN NGHỊ
KẾT LUẬN
Việc xây dựng biểu thức tính toán thiết kế hoàn thiện kích thước bơm
nhằm đảm bảo về mặt thủy lực cũng như tối ưu hóa thiết kế bơm bôi trơn
Hypôgerôto trong các hệ thống bôi trơn của động cơ thế hệ mới là cần thiết
và đang là xu hướng của nền công nghiệp ôtô và các phương tiện cơ giới
nhằm tiết kiệm nhiên liệu. Để có được những bản thiết kế tối ưu về mặt
kích thước và đảm bảo các yêu cầu về lưu lượng, áp suất, chất lượng dòng
chảy sau bơm luận án đã đề ra mục tiêu phải tìm được các điều kiện biên và
điều kiện hình thành biên dạng bánh răng hypôxyclôít, nghiên cứu ảnh
hưởng của các thông số thiết kế đặc trưng {R, R1, rcl} đến điều kiện mòn
đều theo tiêu chí động học cũng như đến khả năng tồn dư chất lỏng sau mỗi
vòng quay dẫn đến hiện tượng hụt lưu lượng so với thiết kế.
Từ những kết quả nghiên cứu trên đây những đóng góp chính của luận án:
iii) Về mặt lý thuyết thiết kế hình học luận án đã nghiên cứu tìm ra
được các điều kiện biên hình thành biên dạng cặp rôto của bơm
Hypôgerôto nhằm giải quyết triệt để các hiện tượng: giao thoa đỉnh
răng, cắt lẹm chân răng, giao thoa đỉnh răng và cạnh răng, tránh va
chạm, kẹt răng mà các nghiên cứu khác cho đến thời điểm hiện tại
chưa giải quyết được triệt để.
iv) Đã tìm ra công thức tính chính xác bán kính đỉnh răng bánh rôto
trong nhằm đảm bảo điều kiện mòn đều hai biên dạng đối tiếp theo
tiêu chí động học nhằm góp phần nâng cao tuổi thọ của bơm
Hypôgerôto.
iii) Đưa ra được thuật toán xác định chính xác bán kính chân răng bánh
răng trong nhằm đảm bảo bơm được thiết kế đúng với lưu lượng
cho trước không bị hụt lưu lượng so với thiết kế mà cũng không bị
thừa chất lỏng có hại cho máy.
iv) Xây dựng được thuật toán tối ưu các tham số thiết kế đặc trưng
theo lưu lượng cho trước nhằm đảm bảo kích thước nhỏ nhất.
KIẾN NGHỊ
Trong phạm vi nghiên cứu của luận án, một số vấn đề sau chưa được đề
cập tới và cũng là những ý tưởng đề xuất để tiếp tục hoàn thiện kết quả
nghiên cứu ở mức độ hoàn thiện hơn về mặt công nghệ cũng như nâng cao
tuổi thọ của bơm đó là:
23
Một là, nghiên cứu về ma sát bôi trơn thủy tĩnh trong bơm cũng như vật
liệu làm hai bánh răng.
Hai là, nghiên cứu những vấn đề nội tại về mặt thiết kế cơ khí của bơm
như: ứng suất, biên dạng, chuyển vị của các răng trong quá trình ăn khớp,
hiện tượng tróc, mỏi trong quá trình làm việc.
Ba là, các giới hạn nhỏ nhất, lớn nhất và tốc độ quay làm bơm có thể
mất áp và mất lưu lượng, đây là những vấn đề mà thực tế cần quan tâm.
24