THIẾT KẾ SƠ ĐỒ NGUYÊN LÝ
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (342.57 KB, 46 trang )
THIẾT KẾ SƠ ĐỒ NGUYÊN LÝ
2. 1 GIỚI THIỆU CHUNG
I- Khái niệm chung
Ngày nay với sự phát triển của khoa học kỹ thuật, các máy sản suất ngày
càng đa dạng và có nhiều chức năng dẫn tới hệ thống trang bị điện ngày càng phức
tạp và đòi hỏi độ chính xác, tin cậy cao.
Do bộ biến đổi năng lượng điện xoay chiều thành một chiều có thể sử dụng
nhiều thiết bị như hệ thống máy phát, khuyếch đại từ, hệ thống van . Chúng được
điều khiển theo những nguyên tắc khác nhau và có những ưu, nhược điểm khác
nhau; khi kết hợp những hệ thống này với động cơ điện một chiều ta có được
những hệ thống truyền động có chất lượng khác nhau. Do đó để có được một
phương án truyền động phù hợp với từng loại công nghệ đòi hỏi nhà thiết kế phải
có sự so sánh logic dựa trên những chỉ tiêu về kỹ thuật và kinh tế.
II- Nội dung chọn phương án
Trong thực tế, khi đứng trước một vấn đề sẽ có nhiều phương án giải quyết.
Tuy nhiên mỗi phương án có những ưu, nhược điểm riêng và nhiệm vụ của nhà
thiết kế là phải chọn ra được phương án tốt nhất.
Đối với các hệ thống truyền động đơn giản không có những yêu cầu cao thì
chỉ cần dùng các động cơ xoay chiều với hệ thống điều khiển đơn giản. Còn các hệ
thống truyền động phức tạp có yêu cầu cao về chất lượng như điều chỉnh trơn, dải
điều chỉnh rộng, đảo chều thì phải dùng động cơ một chiều, các hệ thống điều
khiển đi với nó phải đảm bảo được các yêu cầu và có khả năng tự động hoá cao.
Như vậy, để chọn được hệ thống truyền động phù hợp chúng ta phải dựa vào
công nghệ của máy từ đó đưa ra những phương án đáp ứng được yêu cầu công
nghệ này. Để chọn được phương án tốt nhất trong các phương án đưa ra cần so
sánh chúng về kỹ thuật và kinh tế. Đối với truyền động động cơ điện một chiều thì
bộ biến đổi là phần tử rất quan trọng, nó quyết định đến chất lượng của hệ thống.
Do đó việc chọn lựa phương án của ta là chọn bộ biến đổi thông qua việc xét ở hệ
thống ( bộ biến đổi - động cơ ).
III- Ý nghĩa của việc lựa chọn phương án
Việc so sánh lựa chọn được phương án hợp lý nhất có một ý nghĩa đặc biệt
quan trọng, nó được thể hiện qua các mặt:
+ Đảm bảo được yêu cầu công nghệ của máy sản suất.
+ Đảm bảo làm việc tin cậy, lâu dài.
+ Giảm giá thành sản phẩm và tăng năg suất lao động.
+ Khi sải ra hỏng hóc có thể sửa chữa, thay thế dễ dàng với các linh kiện , thiết
bị dự trữ sẵn có, dễ kiếm, dễ mua.
2-2 CÁC PHƯƠNG ÁN TRUYỀN ĐỘNG
I- Các phương án đưa ra
Để có dược phương án truyền động phù hợp xét trên cả hai khía cạnh kỹ
thuật và kinh tế cho truyền động ăn dao của máy doa 2620B, ở đây em đưa ra một
số phương án mà đáp ứng được các yêu cầu về kỹ thuật công nghệ của truyền động
để từ đó làm căn cứ chọn ra phương án tốt nhất.
Yêu cầu công nghệ của truyền động ăn dao máy doa có những đặc điểm sau:
+ Phạm vi điều chỉnh:
D= 2000:1
+ Độ trơn khi điều chỉnh:
ϕ = =
+
n
n
i
i
1
1
+Độ ổn định tốc độ khi làm việc :
∆n
n n
n
oi dm
oi
=
−
≤ ÷( )%3 5
Ta thấy rằng do phạm vi điều chỉnh đòi hỏi rộng D=2000:1 do vậy các hệ
thống khuyếch đại từ - động cơ, máy phát - động cơ không thoả mãn được chỉ tiêu
này. Do vậy ta loại hai phương án này và đưa ra ba phương án sau:
+ Hệ thống máy điện khuyếch đại - động cơ .
+ Hệ thống van - động cơ.
+ Hệ thống xung áp - động cơ.
II- Phương án I
Hệ thống máy điện khuyếch đại - động cơ
( ∋ MY- Đ )
1,Giới thiệu hệ thống
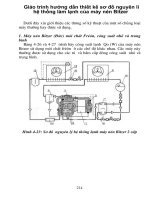
a, Sơ đồ
A B C
MY
Đ/C
CKĐ
Đ
FT
CKF
KĐ
UĐK
n
Ucđ
Hình 2-1
+ FT :là máy phát tốc , có nhiệm vụ khâu phản hồi âm tốc độ
+ CKĐ, CKF: là cuộn kích từ của động cơ và máy điện khuyếch đại.
+ KĐ: là khâu khuyếch đại, thực hiện nhiệm vụ khuyêch đai tín hiệu điều khiển
U
ĐK
+U
đ
:là điện áp đặt
2, Hoạt động của hệ thống
Giả sử động cơ sơ cấp Đ/C quay với tốc độ ω= const , khi ta đặt vào hệ
thống một điện áp đặt U
đ
, thông qua mạch khuyếch đại, cuộn dây CKF được cấp
điện, ∋MY được kích thích sẽ phát ra điện áp một chiều cấp cho động cơ → động
cơ quay .
Do đặc điểm của ∋MY là có cuộn dọc, cuộn ngang ; cuộn ngang được nối
ngắn mạch nên có dòng điện lớn và sinh ra từ thông lớn. Do vậy hệ thống có hệ số
khuyếch đại rất lớn.
- Nếu trong quá trình làm việc vì một nguyên nhân nào đó mà làm cho tốc
độ đông cơ giảm, qua biểu thức U
đk
=U
đ
- ϒn ta thấy khi n giảm thì U
đk
tăng qua
mạch khuyếch đại I
CKF
tăng và U
d
tăng → tốc độ động cơ tăng về trị số yêu cầu.
Khi tốc độ động cơ tăng quá mức thì quá trình diễn ra ngược lại. Đó là
nguyên lý ổn định tốc độ.
3, Họ đặc tính cơ của hệ thống
ta có : I
CKF
= K
KĐ
U
đk
= K
KĐ
( Uđ - ϒn )
E
∋
= K
d
K
N
I
CK
∋
ω
∋
0
n0 max
n0 min
E
∋
= K
d
K
N
K
KĐ
ω
∋
(Uđ- ϒn )
đặt :K
d
K
N
K
KĐ
ω = K
→ E
∋
MY
= K(U
- ϒn )
Xây dựng phương trình đặc tính cơ của hệ thống:
n
U
K
R R
K
I
U E
n
E
K
R R
K
I
n
K U n
K
R R
K
I
u
d d
ud uE
d d
u
u EMY
EMY
d d
uE ud
d d
u
cd
d d
uE ud
d d
u
= −
+
=
⇒ = −
+
⇔ =
−
−
+
φ φ
φ φ
γ
φ φ
( )
Sau khi biến đổi biểu thức này ta được:
n
KU
K K
R
K
I
cd
d d d d
u
=
+
−
φ γ φ.
(*)
Trong đó : K = K
đ
K
N
K
KĐ
ω
∋
U
đ
: là điện áp đặt.
R = R
ư
∋
+ R
ưđ
Phương trình ( ∗
) là phương trình
đặc tính cơ của hệ thống. Ta thấy
rằng độ cứng của đặc tính là:
β
φ γ
=
+
R
K K
d d
.
Độ cứng khi có mạch vòng phản
hồi âm tốc độ đã được cải thiện rất nhiều.
Họ đặc tính cơ của hệ thống được vẽ trên hình 2-2.
Hình 2-2
I,M
4, Đánh giá chất lượng hệ thống
a, Ưu điểm
+ Hệ thống làm việc rất linh hoạt.
+ Họ đặc tính cơ có dạng tuyến tính.
+Việc điều chỉnh đều được thực hiện trên mạch kích từ nên thuận tiện cho tự
động hoá , nâng cao chất lượng hệ thống.
+ Có hệ số khuyếch đại lớn.
b, Nhược điểm
+ có nhiều thiết bị quay ,gây ồn.
+ Hiệu suất sử dụng điện năng thấp η = η
Đ/C
η
∋
η
đ
= 0,3 - 0,5
+Diện tích lắp đặt lớn, đòi hỏi nền móng đặc biệt.
III - Phương án II
Hệ thống van - động cơ
(T - Đ )
1,Giới thiệu
a, Sơ đồ
b,Các phần tử của sơ đồ
+ Đ: động cơ một chiều kích từ độc lập,thực hiện chức năng biến
năng lượng điện một chiều thành cơ năng truyền động
cho cơ cấu sản xuất.
+ BBĐ: là bộ biến đổi van có điều khiển , thực hiện chức năng biến
năng lượng điện xoay chiều thành năng lượng điện một
chiều cung cấp cho động cơ.
A B C
BBĐ
CKĐ
Đ
FT
XĐK
FX
TH&KĐ
n
Uđ
Hình 2-3
+ U
đ
tín hiệu điện áp đặt.
+ FT máy phát tốc thực hiện chức năng khâu phản hồi âm tốc độ.
+TH & KĐ là khối tổng hợp và khuyếch đại tín hiệu
+ FX là mạch phát xung.
2, Hoạt động của hệ thống
Giả sử ban đầu hệ thống đã được đóng vào lưới với điện áp thích hợp, lúc
này động cơ vẫn chưa làm việc . Khi ta đặt vào hệ thống một điện áp đặt U
đ
ứng
với một tốc độ nào đó của động cơ.Thông qua khâu TH & KH và mạch FX sẽ suất
hiện các xung đưa tới các chân điều khiển của các van của bộ biến đổi
bộ biến đổi , nếu lúc này nhóm van nào đó đang được đặt điện áp thuận , van sẽ mở
với góc mở α . Đầu ra của BBĐ có điện áp U
d
đặt nên phần ứng động cơ → động
cơ quay với tốc độ ứng với U
đ
ban đầu.
Trong quá trình làm việc, nếu vì một nguyên nhân nào đó làm cho tốc độ
động cơ giảm thì qua biểu thức : U
ĐK
= U
đ
- ϒn
khi n giảm → U
ĐK
tăng → α giảm → U
d
tăng → n tăng về điểm làm việc yêu cầu.
Khi n tăng quá mức cho phép thì quá trình diễn ra ngược lại. Đây là nguyên lý ổn
định tốc độ.
3,Họ đặc tính cơ của hệ thống
Sức điện động của BBĐ:
E
b
= E
bm
cosα = U
b
( U
b
=U
Ư
: điện áp đầu ra của bộ biến đổi )
E
b
= K
KĐ
K
b
( U
đ
- ϒn )
α
γ
=
−
actg
K K U n
E
KD b d
bm
( )
+Phương trình đặc tính cơ của hệ thống:
M
Hình 2-4
n
n0max
0
n
U
K
R R
K
I
K K U
K
R R
K
I
n
K K U
K
R R
K K K
I
b
d d
b
d d
u
KD b d
d d
b u
d d
u
KD b cd
d d
b u
d d KD b
u
= −
+
= −
+
⇒ = −
+
+
φ φ φ φ
φ φ γ
u
.
Đây là phương trình đặc tính cơ của hệ thống.Từ đây ta vẽ được họ đặc tính
cơ
của hệ thống trên hình 2-4.
4, Đánh giá chất lượng hệ thống
a, Ưu điểm:
+ Do sử dụng các thiết bị bán dẫn ở bộ biến đổi nên hệ thống có độ tác động
nhanh cao, hiệu suất hệ thống cao.
+ Là bộ biến đổi tĩnh có kết cấu gọn nhẹ, không yêu cầu nền móng đặc biệt.
+ Dễ thiết lập các hệ thống tự động kín để nâng cao chất lượng hệ thống.
b, Nhược điểm
+ Khả năng chịu quá tải về dòng, áp nhỏ; khi có gia tốc dòng và áp du/dt, di/dt có
nguy cơ làm hỏng các lớp tiếp giáp.
+
-U
D0
Đ
MK
CKĐ
XMXK
FX
KĐ
Uđk
FT
n
Ucđ
Hình 2-5
+Sức điện động của bộ biến đổicó dạng đập mạch làm phát sinh thành phần sóng
hài bậc cao gây phát nóng động cơ ( có thể khắc phục nhược điểm này bằng cách
mắc thêm các cuộn kháng ).
+ Hệ thống làm việc có cosϕ nhỏ.
IV - Phương án III
Hệ thống xung áp - động cơ
1, Giới thiệu
a, Sơ đồ
b,Các phần tử của hệ thống
+ Đ: động cơ một chiều kích từ độc lập thực hiện chức năng biến đổi điện năng
một chiều thành cơ năng truyền động cho cơ cấu sản xuất. CKĐ là cuộn kích từ
của động cơ.
+ MK : là mạch khoá van có nhiệm vụ tạo xung điện áp ngược đặt nên van đẻ khoá
van.
+ T :tiristo chức năng như một khoá đóng mở để băm điện áp nguồn một chiều.
U
t
t1
TCK
+ FT : là máy phát tốc thực hiện chức năng khâu phản hồi âm tốc độ.
+Uđ: là tín hiệu điện áp chủ đạo.
+KĐ : là mạch khuyếch đại, có nhiệm vụ khuyếch đại tín hiệu điện áp U
đk
để đưa
vào mạch FX.
+FX : là mạch phát xung có nhiệm vụ phát ra xung mở cho van T và xung khoá
cho mạch cho mạch khoá van MK.
+ D
O
: là van diốt.
2, Hoạt động của hệ thống
Giả sử ban đầu ta đặt vào hệ thống một điện áp chủ đạo U
đ
( khi hệ thống đã
được đóng vào nguồn một chiều ) qua nút tổng hợp tín hiệu ta có:
U
đk
= U
đ
- ϒn
Tuy nhiên ban đầu n = 0 → U
đk
= U
đ
, tín hiệu này qua mạch KĐ được đưa
tới mạch FX sẽ pháp ra xng mở đưa tới chân điều khiển của van T và ở đầu ra có
sức điện động ra E
b
.
E
t
T
U
b
CK
=
1
Sức điện động này được đặt nên động cơ và động cơ sẽ quay với tốc độ
tương ứng với điện áp đặt ban đầu. Khi muốn thay đổi tốc độ động
cơ ta thay đổi U
đ
.
Trong quá trình làm việc giả sử
nguyên nhân nào đó mà tốc độ động cơ giảm
khi đó qua mạch phản hồi âm tốc độ ta có:
U
đk
= U
đ
- ϒn
Khi n giảm → U
đk
tăng → t
1
=KU
đk
tăng → E
b
tăng và tốc độ động cơ sẽ
tăng về giá trị đặt.
n
n0max 0-n0max
Hình 2-6
IƯ
Nếu tốc độ động cơ tăng quá tốc độ đặt thì quá trình diễn ra ngược lại. Đây
là nguyên lý ổn định tốc độ .
3, Họ đặc tính cơ của hệ thống
Sức điện động của BBĐ:
E
t
T
U
b
CK
=
1
Phương trình đặc tính cơ của hê thống:
n
E
K
R R
K
I
t U
T K
R R
K
I
t K u K U n
n
K U
T K K
R R
T K K
I
b
d d
b u
d d
u
CK d d
b u
d d
u
dk cd
cd
CK d d
b u
CK d d
u
= −
+
= −
+
= = −
⇒ =
+
−
+
+
φ φ φ φ
γ
φ γ φ γ
1
1 1 1
1
1 1
( . )
Đây làp phương trình đặc tính cơ của hệ thống
từ phương trình này ta có họ đặc tính cơ của
hệ thống như hình vẽ.
4, Đánh giá chất lượng hệ thống
a,Ưu điểm
+ Hệ thống này được dùng ở những nơi có
nguồn một chiều có công suất » công suất
của động cơ và khi đó trong sơ đồ thay thế có thể bỏ qua R
b
và đặc tính cơ có độ
cứng cao.
+ Hệ thống này dùng ít van động lực .
+Dễ tự động hoá.
b, Nhược điểm
+ Phải có nguồn một chiều hoặc kèm theo bộ nguồn xuay chiều - một chiều.
+ Dạng điện áp ra có dạng xung gây tổn thất phụ trong động cơ.
+Bộ biến đổi này khi làm việc có thể rơi vào chế độ dòng gián đoạn.
V- Chọn phương án truyền động
Trong cả ba phương án đưa ra đều đáp ứng được yêu cầu công nghệ của
truyền động ăn dao của máy doa. Tuy nhiên, phương án I với những nhược điểm
căn bản là:
+ Giá thành đắt vì phải sử dụng nhiều máy điện quay.
+ Gây tiếng ồn, tốn diện tích lắp đặt.
+ Hiệu suất thấp → chi phí vận hành lớn.
Vì những lý do đó ta loại phương án này. Vấn đề là lựa chọn một trong hai
phương án còn lại.
Trong hai phương án còn lại ta thấy rằng phương án III đòi hỏi phải có
nguồn một chiều với công suất lớn, điều này không phải nhà máy cơ khí nào cũng
có được. Trong trường hợp không có nguồn một chiều thì ta phải tạo ra nó từ
nguồn xoay chiều , khi đó phương án III trở nên phức tạp hơn phương án II.
Mặt khác đối với truyền động ăn dao của máy doa đòi hỏi phạm vi điều chỉnh rất
lớn
( D= 2000:1). Như vậy nếu sử dụng phương án III ở vùng tốc độ thấp hệ thống rất
dễ rơi vào làm việc ở chế độ dòng gián đoạn. mà muốn khác phục điều này cần
phải có cuộn kháng với L
K
rất lớn.
Từ những phân tích như vậy ta thấy rằng phương án II có tính ưu việt hơn
cả. Ta chọn phương án II làm phương án truyền động cho truyền động ăn dao của
máy doa.
2. 3 THIẾT KẾ SƠ ĐỒ NGUYÊN LÝ
Mạch điện nguyên lý của hệ thống truyền động điện gồm hai phần:
+ Mạch động lực.
+ Mạch diều khiển.
Mạch động lực là phần tử trực tiếp thực hiện các quá trình năng lượng theo
yêu cầu công nghệ đặt ra. Mạch điều khiển có chức năng diều khiển mạch động lực
thực hiện các quá trình công nghệ . Như vậy khi thiết kế sơ đồ nguyên lý phải đi từ
mạch động lực.
I-Thiết kế mạch động lực
Mạch động lực bao gồm các phần tử: sơ đồ chỉnh lưu, cuộn kháng, máy biến
áp động lực, các phần tử R- C. Theo phương án đã chọn thì động cơ là động cơ
một chiều kích từ độc lập. Như vậy,việc thiết kế sơ đồ mạch động lực chỉ còn là
lựa chọn các phần tử khác cho phù hợp.
1, Chọn sơ đồ chỉnh lưu
Có nhiều sơ đồ chỉnh lưu đáp ứng được yêu cầu công nghệ. Tuy nhiên ở
mỗi sơ đồ có các chỉ tiêu về chất lượng khác nhau, giá thành khác nhau . Vấn đề
đặt ra là lựa chọn cho phù hợp.
- Các sơ đồ một pha tuy rẻ, song có chất lượng điện áp ra kém, nhất là khi
góc mở α lớn, truyền động có phạm vi điều chỉnh lớn do đó đòi hỏi góc mở α dao
động rộng và như vậy sơ đồ một pha khó đáp ứng được (khi góc α có nguy cơ hệ
thống làm việc ở chế độ dòng gián đoạn ).
- Vì những lẽ đó ta chỉ lựa chọn ở sơ đồ ba pha. Sơ đồ cầu ba pha tuy có
chất lượng điện áp ra tốt hơn sơ đồ tia ba pha, song nó có giá thành cao và mạch
diều khiển cũng phức tạp hơn. Sơ đồ tia ba pha có chất lượng điện áp ra kém hơn
( điều này có thể khắc phục bằng các cuộn kháng ) song nó hoàn toàn đáp ứng
được các yêu cầu công nghệ. Vì những lý do này ta chọn sơ đồ tia ba pha.
2, Lựa chọn phương án đảo chiều
Để đảo chiều cho động cơ điện một chiều có hai hướng là đảo chiều dòng
kích từ và đảo chiều điện áp đặt vào phần ứng động cơ.
a, Đảo chiều dòng kích từ
Khi thực hiện đảo chiều quay của động cơ bằng đảo chiều dòng kích từ thì ta
phải giảm điện áp đặt vào phần ứng động cơ vì nếu không động cơ có nguy cơ bị
ngắn mạch. Ta biết rằng:
I
U E
R
U K
R
u
u
u
u
u
=
−
=
− φω
Khi φ = 0 ( R
ư
rất nhỏ ) thì I
ư
tăng rất lớn có nguy cơ phá hỏng động cơ. như
vậy khi thực hiện đảo chiều dòng kích từ (đảm bảo an toàn ) thì thời gian đảo
chiều lớn làm giảm năng suất của hệ thống.
Mặt khác, ở phương pháp này hệ thống có họ đặc tính cơ sấu hơn so vớ
phương pháp đảo chiều điện áp phần ứng .
b, Đảo chiều điện áp đặt vào phần ứng động cơ
Phương pháp này có thể dùng:
+ Sử dụng cầu tiếp điểm của khởi động từ.
+ Dùng hai bộ chỉnh lưu đấu song song ngược hoặc đấu chéo.
Khi dùng cầu tiếp điểm thì kém bền vì hệ thống của ta khi làm việc thường
xuyên đảo chiều, mỗi lần đảo chiều dòng hồ quang một chiều sẽ làm mòn tiếp
điểm. Mặt khác, khi đó vùng hãm tái sinh nhỏ, vùng hãm ngược lớn gây giật và
quá trình hãm ngược còn làm dòng phần ứng lớn vì:
I
U E
R
U E
R
u
u
u
u
u
=
− −
=
− +( )
Dòng điện này có giá rị rất lớn.
- Khi sử dụng sơ đồ đấu chéo mạch lại trở nên phức tạp đòi hỏi máy biến áp phải
có hai cuộn dây thứ cấp.
- Khi dùng hai BBĐ đấu song song ngược sẽ đảm bảo khắc phục hết những nhược
điểm của các phương pháp kia, hơn nữa truyền động của ta đòi hỏi đảo chiều
nhanh nên phương án này là phù hợp hơn cả.
3, Lựa chọn phương án điều khiển hai bộ chỉnh lưu
Để điều khiển hai bộ biến đổi làm việc song song ngược có hai phương
pháp:
+ Điều khiển độc lập ( điều khiển riêng ).
+ Điều khiển phối hợp ( điều khiển chung ).
a,Điều khiển độc lập
Ở phương pháp này hai bộ biến đổi làm việc độc lập với nhau. Khi phát cho
bộ biến đổi thuận làm việc thì bộ biến đổi ngược không được phát xung sẽ khoá
lại và ngược lại. Phương pháp này có ưu điểm là không phát sinh dòng cân bằng
song nhược điểm của nó là thời gian đảo chiều lớn. vì để đảm bảo cho sơ đồ làm
việc an toàn thì yêu cầu phải có thời gian ngừng dòng để cho các van của bộ biến
đổi làm việc ở giai đoạn trước phục hồi lại tính chất điều khiển và như vậy làm
giảm độ tác động nhanh của hệ thống.
Tuy vậy vẫn có thể tăng độ tác động nhanh của hệ thống bằng cách giảm
thời gian ngừng dòng xuống cực thiểu nhờ những mạch kiểm tra tác động nhanh.
b, Điều khiển chung
Trong phương pháp này lại gồm có:
+Điều khiển phối hợp tuyến tính.
+ Điều khiển phối hợp phi tuyến.
∗ Phương pháp điều khiển phối hợp tuyến tính: ở phương pháp này người ta
đồng thời phát xung đến mở cho cả hai BBĐ , với quan hệ góc mở: α1 + α2 =
1800. Khi hệ thống làm việc luôn tồn tại một BBĐ làm việc ở chế độ chỉnh lưu ( α
< 90
0
) và một BBĐ làm việc ở chế độ nghịch lưu (α > 90
0
) .
* Phương pháp này có ưu điểm: là đảo chiều nhanh, quan hệ giữa điện áp
trung bình ra và Uđk là đơn trị. Song nhược điểm của nó là: làm phát sinh dòng
cân bằng gây tổn thất trong BBĐ dẫn đến phải tăng công suất tính toán của các
phần tử. Tuy nhiên, điều này có thể khắc phục bằng cách mắc thêm các cuộn kháng
cân bằng.
∗ Phương pháp điều khiển phối hợp phi tuyến: ở phương pháp này người ta
cho hai BBĐ làm viện với quan hệ góc mở: α1 +α2 = 1800 +2θ .