Qúa trình quá độ truyền động điện P2
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (189.76 KB, 6 trang )
Ths. Khơng Công Minh Giáo Trình: Truyền động điện Tự động Ths. Khơng Công Minh Giáo Trình: Truyền động điện Tự động
t
T
M
M
ss
M
M
s
s
ss
ss
ss
s
ss
ss
ss
t
t
c
bd
t
c
t
bd bd
=
ì
ì
() .
ln ln
+
2
2
1
12
1
1
2
12
2
2
(5-49)
Trong đó:
ss
M
M
M
M
t
t
c
t
c
12
2
1
,
=
(5-50)
T
J
M
t
o
t
=
(5-51)
* Khi không tải M
c
() = 0 thì biểu thức (5-48) sẽ đơn giản:
t
J
Ms
s
s
s
ds
o
tt
t
s
s
bd
=+
2
2
(5-52)
Sau khi lấy tích phân ta có:
t
Ts
ss s
s
s
tt
bd t
bd
=+
1
4
2
22 2
ln (5-53)
Các biểu thức (5-49) và (5-53) cho phép xác định đợc quan
hệ giữa mômen và độ trợt theo thời gian. Cho trớc một loạt giá
trị của s, dùng biểu thức (5-47) ta xác định đợc trị số tơng ứng
của M; theo (5-49) ta xác định đợc các giá trị của t.
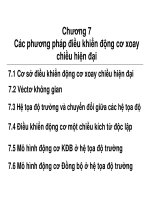
Hình 5-12 giới thiệu các quan hệ giữa mômen và tốc độ với
thời gian trong QTQĐ khi khởi động động cơ ĐK.
Có M() và (t) sẽ tìm đợc M(t) nh trên hình 5-12. Ví dụ
có t
1
sẽ tìm đợc
1
, và tìm đợc M
1
và cuối cùng ta có M
1
(t
1
).
Nếu M
c
() 0 thì:
xl
0 và s
xl
2.
+ Trong quá trình hãm ngợc thì: s
bđ
= 2; s
cc
1, và
cc
0.
Trang 168
+ Trong quá trình đảo chiều : s
bđ
= 2; s
cc
0, và
cc
-
o
.
Trờng hợp biết s
bđ
và s
cc
sẽ tính đợc:
()
t
T
s
ss s
s
s
qd
t
t
bd cc t
bd
cc
=+
4
2
22 2
ln (5-54)
M
o
Thờng kết thúc QTQĐ khi s
cc
5%s
xl
. Thời gian quá độ t
qđ
phụ thuộc vào s
t
và T
t
, nên muốn có t
qđ.min
thờng là thay đổi s
t
.
5.3.1.2. Phơng pháp đồ thị giải tích:
Đây là phơng pháp gần đúng, nhng đơn giản và tiện lợi
hơn phơng pháp giải tích.
Phơng trình chuyển động:
M
đông
(
) = M
đg
(
) = M - M
c
= J
d
dt
(5-55)
Coi J = const, rút ra: dt J
d
M
dg
=
()
(5-56)
Lấy tích phân gần đúng:
tJ
M
d
dg
=
1
0
()
(5-57)
Trang 169
s=2
s=1
s=0
-
o
0 M
c
M
n
M
t
5%
M
t
M
1
M(t)
5%
M
n
M
c
(t)
M t
0 t
1
t
m
M
1
t
kđ
Hình 5 - 12: Quan hệ M(
) và
M(t) ,
(t)
S
Ths. Khơng Công Minh Giáo Trình: Truyền động điện Tự động Ths. Khơng Công Minh Giáo Trình: Truyền động điện Tự động
Trong khoảng t nhỏ có thể coi M
động
() const, do đó:
tJ
M
i
i
dg tbi
.
(5-58)
Trong đó:
i
=
i
-
i-1
M
đg.tbi
là mômen động trung bình trong khoảng
i
.
Đặt: N
M
dg
dg
()
()
=
1
; và
1
M
N
dg tbi
idgtbii
.
.
=
chính là diện tích trên mặt phẳng [M, ] do đờng N
đg
bao.
Chọn trớc các giá trị
i
, sẽ xác định đợc (1/M
đông
) nhờ
M
đông
() đã biết, từ đó tìm đợc t
i
theo (5-58).
Thờng chọn
i
= const, nh thế ta sẽ xác định đợc t
i
,
i
,
và M
i
(
i
), cuối cùng ta có M(t) và (t).
Trên hình 5-13, ta có: J
i
(5-59) tm ms
iM
dg
=
1/
...
Trong đó: m
1/dg
- tỉ xích theo mômen (1/N.m.mm);
m
- tỉ xích theo tốc độ (Rad/s.mm); s
i
- diện tích (mm
2
).
Trang 170
Đ5.4. quá trình quá độ cơ học khi U
nguồn
= var:
Đây là QTQĐ trong hệ thống TĐĐ có bộ biến đổi - động cơ
(BBĐ - ĐC) nh hệ F - ĐM, T - ĐM, KĐT - ĐM, BT - ĐK, ....
Các hệ thống này thờng điều chỉnh các thông số nguồn: thay đổi
điện áp nguồn (thay đổi U
, U
s
...)
Lới ~
Lới ~
u
1
=const
f
1
=const
Bộ đk Bộ đk
BBĐ
BBĐ
u
BĐ
=var
f
BĐ
=var
U
BĐ
=var
---U
---
M
5%
xl
xl
ĐM
ĐK
M
c
M
c
N
đông
M
4
a)
b)
+ -
M
5
M()
M
3
M
2
M
1
M
đông
M
n
Hình 5 - 14: Hệ thống BBĐ - ĐM, BBĐ - ĐK
M(t)
1/M
đg.tb2
(t)
5%
1/M
đg.tb1
M
c
2
M
Khi tác động điều khiển không đổi, hệ thống tơng tự nh
khi có điện áp nguồn không đổi (đã xét ở trên).
1
t
M
đông
M
4
M
3
M
1
M
n
M
c
0
M
5
M
2
t
1
t
2
t
3
t
4
t
5
Khi tác động điều khiển thay đổi theo quy luật cần thiết, thì
hệ thống sẽ có điện áp nguồn thay đổi, và nh vậy sẽ tạo ra đợc
các đặc tính mong muốn của QTQĐ. Đó chính là u điểm của hệ
thống
bộ biến đổi - động cơ.
Hình5 - 13: Đồ thị , M
c
(
), N
đg
(
) và M(t) và
(t)
4.4.1. Hệ thống Bộ biến đổi - động cơ điện một chiều:
Các giả thiết: Mômen cản không đổi: M
c
= const.
Dòng điện phần ứng (I
) liên tục.
Nh vậy khi thay đổi tác động điều khiển (điện áp điều
khiển u
đk
) ta sẽ có các đặc tính điều chỉnh là những đờng thẳng
và song song với nhau.
Trang 171
Ths. Khơng Công Minh Giáo Trình: Truyền động điện Tự động Ths. Khơng Công Minh Giáo Trình: Truyền động điện Tự động
Quá trình quá độ có thể mô tả theo phơng trình vi phân
tuyến tính sau:
T
d
dt
cxl
+= (5-60)
Trong đó:
xl o
c
oxl
o
BD
tt
M
tt
t
ut
k
() () () ()
()
()
==
=
(5-61)
Các giá trị điện áp u
BĐ
(t) khác nhau sẽ có các QTQĐ khác
nhau trong hệ thống TĐĐ.
* Để đơn giản, xét QTQĐ khi khởi động BBĐ - ĐM có:
Điện áp bộ biến đổi:
u
BĐ
(t) = k
u
.t khi 0
t
t
1
= U
BĐ.đm
/k
u
(5-62)
và điện áp định mức: U
BĐ.đm
= const khi t
1
t
+ Khi t < t
1
:
o
(t) =
BĐ
.t (5-63)
xl
(t) =
BĐ
.t -
c
(5-64)
Trong đó: gia tốc
BĐ
=
k
K
U
Kt
uBDdm
=
.
.
1
- thờng cho trớc.
+ Quá trình quá độ khi khởi động sẽ qua 3 giai đoạn:
* Giai đoạn 1: 0 < t < t
o
; M < M
c
; = 0 ; u
BĐ
(t) = k
u
.t
t..t
K
k
R
)K(
K
)t(u
R
)K(
=
R
)t(u
KIKIKM
BD
u
2
BD
2
BD
n
=
=
===
(5-65)
Trang 172
Vậy, mômen tăng tỉ lệ bậc nhất với thời gian. Và điểm làm
việc của động cơ sẽ dịch chuyển trong mặt phẳng [, M] theo
trục hoành nh hình 5-15a.
Khi t = t
o
, kết thúc giai đoạn 1:
t
M
o
c
BD
=
.
(5-66)
* Giai đoạn 2: t
o
t t
1
; M M
c
; 0 ; u
BĐ
(t) = k
u
.t
Tại t = t
o
: M = M
c
:
o
(t
o
) =
BĐ
.t
o
=
c
;
c
=
M
c
- là độ sụt tốc của động cơ khi M = M
c
.
Điểm làm việc sẽ dich chuyển từ đặc tính này sang đặc tính
khác theo quy luật nào đó (đờng có mủi tên chỉ trên hình 4-15a).
Dời gốc toạ độ tới t = t
o
, lúc này tính thời gian là t = t - t
o
:
Phơng trình vi phân:
T
d
dt
cxl
'
+= (5-60)
xl o c
BD o BD c BD
tt
tt t.'
(') (')
..'
=
=+=
(5-67)
+ Nghiệm riêng của (4-60):
rBD
tB= +.' (5-
68)
Hệ số B xác định theo (4-60) khi thay
r
vào và đồng nhất
các hệ số: TtBt
cBD BD BD
..'.'
+ + =
Ta có: B = - T
c
.
BĐ
+ Nghiệm tự do: (5-69)
td
tT
ce
c
=
.
'/
Nghiệm tổng quát:
(5-70) =+ = +
rtdBD cBD
tT
tT ce
c
.' . .
'/
Ths. Khơng Công Minh Giáo Trình: Truyền động điện Tự động Ths. Khơng Công Minh Giáo Trình: Truyền động điện Tự động
Trang 173
Khi t = 0 thì = 0 nên C = T
c
.
BĐ
và ta có:
(5-71) =
BD c BD
tT
tT e
c
.' . ( )
'/
1
Trong giai đoạn này:
MM J
d
dt
MT e
cccBD
tT
c
=+ =+
'
.( ) (5-72)
'/
1
Khi t = t
1
, u
BĐ
(t) = U
BĐ.đm
,
o
(t) =
o.đm
, kết thúc giai đoạn 2.
* Giai đoạn 3: t
1
t ; M M
c
; > 0 ; điện áp bộ biến đổi
lúc này: u
BĐ
(t) = U
BĐ.đm
= const;
Dời gốc toạ độ tới t = t
1
, lúc này tính thời gian là t = t - t
1
:
Tơng tự QTQĐ cơ học khi điện áp nguồn không đổi, áp
dụng các kết quả trên ta có phơng trình:
(5-
73)
=+
xl bd xl
tT
e
c
().
"/
(5-74) MMMMe
cbdc
tT
c
=+
().
"/
xl
=
o.đm
-
c
(5-75)
Điều kiện ban đầu:
bđ
=
cc2
=
( ) với t = tt'
1
- t
o
; (5-76)
M
bđ
= M
cc2
= M( ) với t = tt'
1
- t
o
; (5-77)
Sự biến thiên của (t) và M(t) trình bày trên hình 5-15.
Từ (5-77): M
đg
= M - M
c
= J
.(1 - e
-t/Tc
) (5-78)
= d
/dt =
BĐ
(1 - e
-t/Tc
) (5-79)
Ta thấy rằng, trong QTQĐ khi khởi động thì mômen động
M
đg
và gia số không phụ thuộc M
c
mà chỉ phụ thuộc vào
BĐ
và
T
c
. Nh vậy khi cho trớc hệ thống TĐĐ có T
c
= const thì chỉ còn
lại
BĐ
, do đó ta có thể điều khiển QTQĐ một cách tuỳ ý không
phụ thuộc vào phụ tải.
Trang 174
M
o.đm
o.đm
T
c
xl
M
m
c
xl
5%
m
* Đối với QTQĐ khi hãm và đảo chiều: có M
đg
và tơng
tự ở trên, khi giảm
o
(t) một cách tuyến tính và M
c
= const thì ta
có
BĐ
< 0.
Ta có thể lựa chọn quy luật biến thiên của u
BĐ
(t) để tạo ra
đợc đặc tính mong muốn của QTQĐ trong hệ thống TĐĐ.
5.4.2. Hệ thống Bộ biến đổi - động cơ điện xoay chiều:
Trờng hợp hệ thống bộ biến tần (BT) - động cơ không
đồng bộ (ĐK), tác động điều khiển làm thay đổi điện áp và tần số
của bộ BT theo quy luật nào đó (thông thờng là theo quy luật
u
BT
/f
BT
= const).
Giả thiết bỏ qua ảnh hởng của các sóng điều hòa bậc cao
của bộ BT đến đặc tính cơ. Nhịp độ biến thiên của u
BT
và f
BT
đảm
bảo sao cho: M < M
t
(tức là động cơ làm việc ở đoạn đặc tính cơ
có s < s
t
). Khi đó, thay đổi điện áp điều khiển bộ BT thì đặc tính
cơ có thể coi là những đờng thẳng song song nhau.
0 M
c
M
m
M 0 t
o
t
1
t
kđ
M
t
qđ
= t
kđ
M(t)
o
(t)
(t)
T
c
M(t)
5%
M
c
(t)
o
(t)
Hình 5 - 15: Đặc tính
(M), quỹ đạo pha,
(t) và M(t)
Ths. Khơng Công Minh Giáo Trình: Truyền động điện Tự động Ths. Khơng Công Minh Giáo Trình: Truyền động điện Tự động
Với những giả thiết trên, hệ thống BT - ĐK có thể xem là hệ
tuyến tính, nên ta có thể dùng các phơng trình tuyến tính ở hệ
BBĐ - ĐM trên để khảo sát cho hệ BT - ĐK.
Lúc này: f
BT
= k
f
.t ; và:
BT
= d
o
/dt = (2/p).k
f
; (5-
80)
Trang 175
Đ5.5. quá trình quá độ điện - cơ trong hệ tđđ:
Đối với hệ mà động cơ có điện cảm lớn thì hằng số thời
gian điện từ sẽ lớn, nh vậy ta phải xét QTQĐ có cả T
c
và T
đt
, gọi
là QTQĐ điện - cơ trong hệ thống TĐĐ.
Ví dụ, khi khởi động trực tiếp động cơ ĐM
đl
, Nếu không có
điện cảm L
trong mạch phần ứng thì xảy ra hiện tợng thoạt đầu
dòng điện phần ứng tăng vọt lên trị số bằng dòng ngắn mạch rồi
sau đó giảm dần theo quy luật hàm mũ.
Nhng thực tế, do có L
nên dòng điện không tăng đột biến
nh vậy đợc. Và QTQĐ sẽ diễn ra khác đi.
Ví dụ xét QTQĐ mạch phần ứng ĐM
đl
:
Phơng trình đặc tính quá độ mạch phần ứng:
++=++= K
dt
di
LR.iE
dt
di
LR.iu
; (5-81)
Mặt khác: M
đg
= M - M
c
=
dt
d
J
(5-82)
Nên: M = M
c
+
dt
d
J
(5-83)
Suy ra: i
= I
.c
+
dt
d
K
J
(5-84)
Đạo hàm (4-84) ta có:
2
2
dt
d
K
J
dt
di
= (5-85)
Trang 176
Thay (5-84), (5-85) vào (5-81) ta có:
+
+
+= K
dt
d
K
L.J
dt
d
K
R.J
R.Iu
2
2
c.
(5-86)
Biến đổi, ta có:
xlc
2
2
c
dt
d
T
dt
d
T.T =+
+
(5-87)
Trong đó:
T
= L
/R
- hằng số thời gian điện từ mạch phần ứng.
T
c
= J/
= (J.R
)/(K
)
2
- hằng số thời gian cơ học.
xl
=
o
-
c
=
o
- (I
.R
)/K
- tốc độ xác lập.
Phơng trình đặc tính của (4-87):
+ U
- + U
-
R
L
E
I
I
T
.T
c
.p
2
+ T
c
p + 1 = 0 (5-88)
E
Giải (5-88) ra ta có nghiệm:
R
, L
a) b)
c
2,1
T2
)T/T4(1
T2
1
p
= (5-89)
Hình 5 - 16: Sơ đồ mạch phần ứng ĐM và sơ đồ thay thế
+ Nếu: T
c
4T
thì (5-88) có nghiệm thực và âm:
c
2,12,1
T2
)T/T4(11
p
== (5-90)
Và (t) sẽ biến thiên theo quy luật hàm mũ.
+ Nếu: T
c
< 4T
thì (5-88) có nghiệm phức (phần thực âm):