GIỚI THIỆU VỀ ĐỘNG CƠ MỘT CHIỀU
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (223.51 KB, 11 trang )
DC Motor - Content
1. Các loại động cơ mộtchiều dùng cho robot
2. Điềuchỉnh tốc độ động cơđiệnmộtchiều
3. Giữ cứng đường đặc tính tốc độ
4. Phương pháp PWM điềuchếđiệnáp
5. Mộtsố mạch ứng dụng
GIỚI THIỆU VỀ ĐỘNG CƠ MỘT CHIỀU
DC Motor - Motor for robot
C
C
Á
Á
C LO
C LO
Ạ
Ạ
I Đ
I Đ
Ộ
Ộ
NG CƠ M
NG CƠ M
Ộ
Ộ
T CHI
T CHI
Ề
Ề
U
U
Động cơ mộtchiềucóthể chia làm mộtsố loạicơ bản:
-
Động cơ mộtchiều, kích từđộclập
- Động cơ mộtchiềukíchtừ nốitiếp
- Động cơ mộtchiềukíchtừ song song
- Động cơ mộtchiều, không chổithan
DC Motor - Permanent Magnetic
Đ
Đ
Ộ
Ộ
NG CƠ M
NG CƠ M
Ộ
Ộ
T CHI
T CHI
Ề
Ề
U, K
U, K
Í
Í
CH T
CH T
Ừ
Ừ
V
V
Ĩ
Ĩ
NH C
NH C
Ử
Ử
U
U
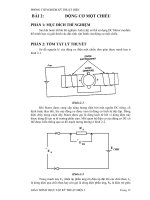
• Là trường hợp đặcbiệtcủa động cơ mộtchiềukích
thích độclập. Cuộn dây kích từ trên Stator được
loạibỏ và thay bằng mộtcặp nam châm vĩnh cửu.
• Điệnápnuôiđược đưa vào qua cổ góp cơ khí. Dòng điệnchạyqua cuộn
dây tạoramộttừ trường và bị từ trường nam châm cốđịnh hấpdẫn
khiến rotor quay cho tới khi cực được nam châm hoá thẳng vớicựcnam
châm. Đúng lúc ấy, chổi than và vành góp chuyển điệnápcungcấp sang
cặpcựctiếptheo.
• Chiều quay của động cơ mộtchiều do chiều dòng điệncấp vào phần
ứng, để đảochiềuchỉ cần đảochiều điệnápphần ứng.
DC Motor - Brushless DC
• Động cơ mộtchiềukhôngchổi than không được
cấp liên tụcmột điệnápmộtchiều. Rotor của động
cơ là một nam châm vĩnh cửu. Stator gồm các cực
dây cuốn, khi đượccấp điện, các cựcnàyhoạt động
giống như một nam châm điện.
• Động cơ mộtchiềukhôngchổi than không sử dụng chổi than và cổ góp.
Việccấp điệnáplầnlượtchocáccựctừ thựchiệnbằng mạch điệntử của
driver.
• Việcloạibỏ chổi than cổ góp tránh được đánh lửacổ góp, tăng công suất,
tăng tốc độ maximum. Tuy nhiên luôn đòi hỏiphảicómộtbộđiều khiển
điệntử.
Đ
Đ
Ộ
Ộ
NG CƠ M
NG CƠ M
Ộ
Ộ
T CHI
T CHI
Ề
Ề
U, KHÔNG CH
U, KHÔNG CH
Ổ
Ổ
I THAN
I THAN
DC Motor - Equations
C
C
Á
Á
C PHƯƠNG TRÌNH QUAN TR
C PHƯƠNG TRÌNH QUAN TR
Ọ
Ọ
NG
NG
+ Phương trình tốc độ
I
K
RR
K
U
ufng
φφ
ω
+
−=
+ Phương trình moment
IKM .
φ
=
ng
U
Điệnápnguồnnuôi
f
R
u
R
K
Hệ sốđộng cơ
Điệntrở phụ
Điệntrở mạch phần ứng
φ
Từ thông cựctừ