Bài giảng môn kỹ thuật điện – chương 7 máy điện không đồng bộ
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (1.01 MB, 39 trang )
Chng 7 : MY IN KHễNG NG B
Pđiện
7.1 Khái niệm chung
.c
om
co
ng
Pcơ
Z X Y
th
Y/-380/220
A, kA V
A B C
du
o
ng
Iđm
hp u dõy ra
an
1. Định nghĩa:
2. Các số liệu định mức
Pđm
W, kW
Uđm
V, kV
Pđm
Chỳ ý:
nđm
cu
u
Um , Im: /l dõy
(W)
M đm
Pđm
Pđm
60 Pđm
=
9,55
=
=
n đm
2 n đm
đm
vg/ph
Mđm
Nm
và cosϕ
CuuDuongThanCong.com
M ®m = 9550
P®m (kW)
n ®m(vg/ph)
/>
(vg/ph)
Hình vẽ lá thép stato và roto
7.2 Cấu tạo :
1. stato
a. Lâi thÐp
b. D©y quÊn
stato
.c
om
roto
th
an
co
ng
SƠ ĐỒ DÂY QUẤN CỦA ĐC KĐB 3 PHA
5
7
9
11
13
15
17
ng
3
19
21
23
25
27
29
31
33
35
u
du
o
1
1
cu
1
2
a
b
2
c
x
Chú ý: 3 dq AX, BY, CZ đối xứng
(lệch trong không gian 1200)
z = 36 p = 2 a = 2 q = 3 y = 7
CuuDuongThanCong.com
/>
y
cu
u
du
o
ng
th
an
co
ng
.c
om
Một số hình ảnh về chế tạo lõi thép Stato
CuuDuongThanCong.com
/>
cu
u
du
o
ng
th
an
co
ng
.c
om
Một số hình ảnh về dây quấn Stato
CuuDuongThanCong.com
/>
2. Roto
a. Lõi thép
b. Dây quấn: có 2 loại
* Roto lồng sóc
Hình vẽ lá thép stato và roto
3 vnh trt = đồng
an
co
ng
Thanh dẫn =
đồng or nhơm
* Roto d©y qn
.c
om
Dây quấn 3
pha = ng
ni Y
du
o
ng
th
Vnh
ngn
mch
cu
u
Đặc điểm:
Rf
Chi than
c im :
- Kt cu đơn giản
- Cấu tạo phức tạp, giá thành cao
- Không thay đổi được R2
- Có thể thay đổi R2 nhờ Rf
3. Khe hở không khí :
CuuDuongThanCong.com
= (0,25 ữ1) mm
/>
cu
u
du
o
ng
th
an
co
ng
.c
om
Một số hình ảnh về lõi thép roto
CuuDuongThanCong.com
/>
Động cơ nhìn từ ngồi
ng
th
an
co
ng
.c
om
Nhãn máy
cu
u
du
o
Hộp
đầu
dây ra
CuuDuongThanCong.com
Hộp cực
/>
cu
u
du
o
ng
th
an
co
ng
.c
om
Động cơ KĐB tổng thể có cắt 1 phần 4
CuuDuongThanCong.com
/>
cu
u
du
o
ng
th
an
co
ng
.c
om
Động cơ KĐB dây quấn
CuuDuongThanCong.com
/>
.c
om
7.3 T trng quay:
1. Định nghĩa
- t nht cú 2 dq lệch trong khơng gian
Điều kiện: - Dịng trong 2 dq lệch về thời gian
2. TTQ của ĐC KĐB 3 pha:
co
ng
th
an
- Có 3 dq lệch trong khơng gian 1200
- Dịng trong 3 dq lệch về thời gian 1200
iC
du
o
u
0.5
cu
2π/3
0
2 điều kiện thỏa mãn:
iB
iA
1
ng
iA = Imsinωt
iB = Imsin(ωt-2π/3)
iC = Imsin(ωt+2π/3)
4π/3
2π
ωt
-0.5
-1
0
1
2
ωt1
3
4
ωt2
CuuDuongThanCong.com
5
6
ωt3
/>
T¹i ωt1
φ tong
ng
du
o
Y
Y
B
co
+
C
X
+
A
+
Y
Theo thời gian Φtong có phương và chiều
thay đổi TTQ (theo định nghĩa)
CuuDuongThanCong.com
B
Z
u
C
φ tong
cu
+
A
+
th
X
A+
Z+
an
φ tong
T¹i ωt3
ng
T¹i ωt2
B
Z+
.c
om
*) Từ trường tổng trong ĐC tại các thời điểm:
/>
+
C
X
- Biên độ của TTQ tròn:
φtong =
3φ1f
2
3
φtong = φm
2
co
TT 1 pha là TT đập mạch ?
φA =φm
ng
Với Φ1f: Biên độ TT 1 pha.
1
φB = φm
2
1
φC = φm
2
.c
om
*) Tính chất TTQ của ĐC 3 pha:
- φ tong có biên độ khơng đổi TTQ trịn
th
an
- Tốc độ quay của TTQ:
Theo hình mơ tả TT tổng: TT có 2 cực N-S (số đơi cực p = 1)
cu
u
du
o
ng
Khi iS biến thiên 1 CK, φ tong quay được 1 vịng
Số đơi cực = p, iS b.thiên 1 CK, φ tong quay được 1/p vịng
Vì vậy:
CuuDuongThanCong.com
60f1
n1 =
p
[vg/ph]
/>
- Chiều quay TTQ:
C
n1
B
A
C
cu
u
A
B
du
o
ng
th
an
co
ng
.c
om
Theo hình vẽ mơ tả, thứ tự dòng 3 pha A B C
Từ trường Φtong sẽ lần lượt theo trục pha A B C: n1
theo chiều quay của kim đồng hồ
Nếu đổi thứ tự pha của dòng điện trong 2 dq cho nhau
=> TT quay ngược lại
Áp dụng để đổi chiều quay của ĐCKĐB
CuuDuongThanCong.com
/>
7.4 Nguyên lý làm việc :
ng
co
- Đặt U~3p vào dq 3 pha cña S
60f1
=> cã TT quay n1 =
p
=> e2 => i2 (dq rotor luụn ni kớn)
.c
om
e2
an
Tác dụng giữa tong và i2
ã
Mt
n1
+
tong
=> h s trt
u
n1 n
=s
n1
cu
Đặt
du
o
ng
th
=> Ft => Mt => kéo Rotor quay với tốc độ
n cùng chiều với n1. Độ lớn n < n1
=> i2
Khi n = nđm:
CuuDuongThanCong.com
Khi biết nđm
sđm= 0,02 ÷ 0,06
/>
n1, p
7.5 Các phương trình mơ tả ĐC KĐB:
.c
om
So sánh giữa MBA và ĐC KĐB
ĐCKĐB 3 pha
MBA 3 pha
Từ trường quay
Rotor quay, Stator đứng yên
Tần số dòng rotor ≠ Tần số dòng stator
u
ng
U2 ≠ 0
du
o
2 đầu dq TC nối với tải điện
th
an
DQ TC cấp cố định so với SC
Tần số dòng điện SC và TC như nhau
co
ng
Từ trường đập mạch
cu
Từ trường chính khép kín trong lõi thép
Dịng từ hóa Io nhỏ (từ
trở nhỏ)
2 đầu dq rotor nối ngắn mạch
U2 = 0
Từ trường đi qua khe hở khơng khí
Dịng từ hóa Io lớn do có từ trở
khơng khí lớn
Sử dụng các pt mô tả MBA cho ĐC KĐB
CuuDuongThanCong.com
/>
1. Phương trình cân bằng điện:
(Viết cho 1 pha; các đại lượng pha)
a. PhÝa Stato:
.c
om
R1
Tương tự dq sơ cấp MBA:
•
•
I1
E1
•
ng
•
U1
X1
co
U 1 = − E 1 + jX 1 I1 + R 1 I1
E1 = 4,44f1 W1 kdq1 φ
th
an
kdq1 < 1 : hệ số quấn rải dq stator
b. PhÝa Roto:
ng
Khi rotor quay với tốc độ n < n1
du
o
s.đ.đ e2 và i2 cã tÇn sè f2 = pn 2
60
víi n2 = n1 - n
u
p(n1 − n)
pn1 (n1 − n)
f2 =
=
= sf1
60
60
n1
cu
n
n2
f2 = sf1
CuuDuongThanCong.com
/>
n1
s.®.® e2 cã :
E2s = 4,44f2 W2 kdq2 φ
= s.4,44f1 W2 kdq2
E2 :
.c
om
E2s = sE2
s.đ.đ khi roto đứng yên
co
E2S
ã
f2
I2
th
ã
X2S
an
PTCB ĐA của dq R:
•
ng
E2 = 4,44f1 W2 kdq2 φ
R2
du
o
ng
0 = − E 2S − jX 2S I 2 − R 2 I 2
u
Trong ®ã : X2S = ω2L2 = 2 π f2 L2 = s. 2 π f1 L2
cu
X2S = sX2
X2 : điện kháng tản khi roto đứng yên
X2
H s biến đổi
s.đ.đ:
E1 w1k dq1
=
ke =
E 2 w 2 k dq2
X2S : điện kháng tản khi roto quay
CuuDuongThanCong.com
/>
2. Phương trình cân bằng từ:
•
•
•
•
.c
om
- Khi roto hở mạch, n = 0 φ do s.t.đ :
Fo = m1w1k dq1 Io
- Khi roto nm, ghìm trục để n = 0 φ do s.t.đ :
•
•
ng
F1 + F2 = m1w1k dq1 I1 − m 2 w 2 k dq 2 I 2
th
an
Khi bỏ qua ∆U1
co
m1, m2 : sè pha dq cña S và R
ng
U1 E1 = 4,44f1 W1 kdq1
ã
du
o
const
.
.
cu
u
m1w1k dq1 I1 − m 2 w 2 k dq 2 I 2 = m1w1k dq1 Io
•
•
=> φ = const => F1 + F2 = Fo
.
•
•
•
I2
I1 −
= Io
m1w1k dq1
m 2 w 2 k dq 2
CuuDuongThanCong.com
•
•
I2 •
I1 − = Io
ki
Với hệ số biến
đổi dịng:
ki =
m1w1k dq1
m 2 w 2 k dq 2
/>
7.6 Qui đổi và sơ đồ thay thế:
- Mc ớch: Có sơ đồ mạch điện chung giữa R và S (giống MBA)
.c
om
việc nghiên cứu được dễ dàng
- Điều kiện: Năng lượng trước và sau khi quy đổi không đổi
.
.
.
0 = − E 2S − jX 2S I 2 − R 2 I 2 (roto quay: E2S, X2S)
ng
Tõ PTCB§A phÝa R:
Chia 2 vế cho s:
cu
Trong đó:
u
du
o
ng
th
an
co
(roto ko quay: E2,
R2
ɺ
ɺ
0 = E2 + I 2 + jX 2
X2) tần số R,S
s
bằng nhau: f1
Nhân 2 vế cho ke.ki/ki:
ɺ R
I
0 = ke Eɺ 2 + 2 2 ke ki + jX 2 ke ki
ki s
Ta có:
0=
− Eɺ '2
R '2
'
− ɺI 2
s
E '2 = k e E 2 = E1
R = ke ki R2
I2
I =
ki
X 2' = ke ki X 2
'
2
CuuDuongThanCong.com
'
2
+
'
jX 2
Với:
R2'
'
' 1− s
= R2 + R2
s
s
/>
R1
Rth >> R1, R’2
R2 ’ X 2 ’ I 2 ’
X1
Io
I1
U1
th
ng
'
'
Io
X1
R2
Rth
Xth
R2 2
'
(R1 +
) + (X1 + X 2 ) 2
s
CuuDuongThanCong.com
1− s
s
X2 I2
cu
U1
R1
R2
u
du
o
U1
Khi ú:
X1
an
SĐTT gần đúng:
ng
I1
R1
co
Xth >> Rth
'
R2
Xth
Xth >> X1, X’2
I2 =
Rth
.c
om
Sơ đồ thay thế 1
pha của ĐC KĐB:
/>
'
1− s
s
T.hao đồng trên S
Pđ1 =3 R1I12
Pđ1
Pst
co
an
Pđ1 + Pst =
P1
Pđ2
Pđt
=>Tổn hao trên stato
'
R 2 '2
P1 - P1 = Pđt = 3
I2
s
Tổn hao đồng trên R: Pđ2 =3 R2I22 = 3R 2, I 2,2
th
Công suất điện từ
Pcơ
du
o
ng
Pđ2 = sPđt
1 s '2
Công suất cơ
Pcơ = 3R 2
I2
s
Công suất cơ hữu ích đầu trục:
P2 = Pcơ - Pcơ+fụ
cu
u
'
P2
=
P1
hiệu suất
CuuDuongThanCong.com
1s
R
s
'
2
ng
P1
Tổn hao sắt từ
Pst =3 RthIo2
Io
I1
.c
om
7.7 Q trình năng lượng
§C nhËn tõ líi P1
I2’
R2 ’
R1
≈ 0,7÷ 0,9
/>
1. Mơ men quay (điện từ):
'
co
I2 =
ng
R 2 '2
P®t = 3
I2
s
U1
'
an
Trong ú :
Pđt
M=
1
.c
om
7.8 Mô men quay và đặc tính cơ
'
th
R
'
(R1 + 2 ) 2 + (X1 + X 2 ) 2
s
2
'
u
3pU1 R 2 /s
M=
'
R2 2
'
2πf1[(R1 +
) + (X1 + X 2 ) 2 ]
s
cu
Ta có :
du
o
ng
ωluoi 2πf1
ω1 =
=
p
p
CuuDuongThanCong.com
/>
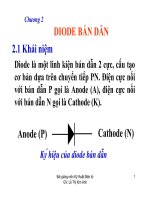
Đặc tính M = f(s):
M=0
+ Khi s = 0
2
Mm
.c
om
+ Khi s = 1
'
3pU 1 R 2
=
'
'
2 π f 1 [(R 1 + R 2 ) 2 + (X 1 + X 2 ) 2 ]
R 2'
sk =
≈
’
' V× R1 << X1 + X 2
2
' 2
X1 + X 2
R 1 + (X1 + X 2 )
co
dM
+
=0
ds
ng
R 2'
an
4 π f1 [R 1 +
2
(R 1 + (X 1 + X 2 ) 2 ]
2
'
th
M max =
3pU 1
du
o
Duong cong mo men
50
40
M
cu
M
60
u
M max
ng
2
3pU 1
≈
'
4 π f 1 [R 1 + X 1 + X 2 ]
Mmax
30
20
Mm
10
0
0
0.1
0.2
0.3
0.4
0.5
0.6
s
CuuDuongThanCong.com
/>
0.7
0.8
0.9
1
s
Nhận xét:
- M ∼ U12
- Mm
R2’
∈
.c
om
Với loại roto dq, có Rf để tăng Mm
ng
khi cã Rf nèi tiÕp R2
R2 + Rf
sk ≈
'
X1 + X 2
co
'
an
'
'
Mm’
Mm
=1
cu
'
Mmax
u
R2 + Rf
sk ≈
'
X1 + X 2
du
o
Để Mm = Mmax thì :
ng
th
M max = const
sk sk ’
CuuDuongThanCong.com
/>
2. Đặc tính cơ :
A
n = f(M)
n
k1
1500
Suy ra t M = f(s)
sk
nk
1
0
AB : vùng ổn định
BC : vùng không ổn định
Khi M C
0
10
20
30
40
50
60
C
du
o
tại k1 có M = Mc
=> n
=> M
C được duy trì n
u
>M
* Vïng BC :
0
MC’
t¹i k2 cã M = Mc
cu
Khi M C
MC
k2
500
ng
* Vïng AB:
.c
om
n1
ng
0
B
1000
co
n
an
s
th
n1 − n
s=
n1
MC’
MC
>M
CuuDuongThanCong.com
=> n
=> M
n giảm về 0
/>
M