ĐIỀU KHIỂN LỰC KÉO CHO Ô TÔ ĐIỆN TRÊN CƠ SỞ ƯỚC LƯỢNG TỈ SỐ TRƯỢT
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (11.23 MB, 59 trang )
TRƯỜNG ĐẠI HỌC BÁCH KHOA HÀ NỘI
VIỆN ĐIỆN
BỘ MÔN TỰ ĐỘNG HĨA CƠNG NGHIỆP
ĐỒ ÁN TỐT NGHIỆP
Hà Nội, 5/2018
TRƯỜNG ĐẠI HỌC BÁCH KHOA HÀ NỘI
VIỆN ĐIỆN
BỘ MÔN TỰ ĐỘNG HĨA CƠNG NGHIỆP
ĐỒ ÁN TỐT NGHIỆP
ĐỀ TÀI:
ĐIỀU KHIỂN LỰC KÉO CHO Ô TÔ ĐIỆN
TRÊN CƠ SỞ ƯỚC LƯỢNG TỈ SỐ TRƯỢT
Trưởng bộ môn
: PGS.TS. Trần Trọng Minh
Giáo viên hướng dẫn : ThS. Võ Duy Thành
Sinh viên thực hiện
: Lê Đức Lộc
Lớp
: TĐH 03 - K58
MSSV
: 20132428
Giáo viên duyệt
:
Hà Nội, 5/2018
LỜI CAM ĐOAN
Em xin cam đoan bản đồ án tốt nghiệp: "Điều khiển lực kéo cho ô tô điện trên cơ
sở ước lượng tỉ số trượt" do em tự thực hiện dưới sự hướng dẫn của thầy giáo ThS. Võ
Duy Thành. Các số liệu và kết quả là hoàn toàn đúng với thực tế.
Để hoàn thành đồ án này, em chỉ sử dụng những tài liệu được ghi trong danh mục tài
liệu tham khảo và không sao chép hay sử dụng bất kỳ tài liệu nào khác. Nếu phát hiện
có sự sao chép em xin chịu hoàn toàn trách nhiệm.
Hà Nội, ngày 31 tháng 05 năm 2018
Sinh viên
Lê Đức Lộc
MỤC LỤC
MỤC LỤC
Lời mở đầu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7
Chương 1. Giới thiệu chung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9
1.1. Hệ thống điều khiển lực kéo trên xe ô tô điện (TCS) . . . . . . . . . . . . . . . . . . . .
9
1.2. Tỉ số trượt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
12
1.2.1. Định nghĩa tỉ số trượt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
12
1.2.2. Mối quan hệ giữa tỉ số trượt và lực ma sát . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
12
1.2.3. Tầm quan trọng của tỉ số trượt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
13
1.3. Các phương pháp ước lượng tỉ số trượt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
14
1.3.1. Phương pháp đo trực tiếp . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
14
1.3.2. Phương pháp ước lượng không thông qua đo vận tốc . . . . . . . . . . . . . . . . . . . . . . .
14
1.4. Các công trình điều khiển lực kéo đã được cơng bố . . . . . . . . . . . . . . . . . . . .
15
1.4.1. Điều khiển tỉ số trượt trong khoảng ổn định . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
16
1.4.2. Điều khiển chính xác tỉ số trượt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
17
1.4.3. Phương pháp ước lượng mô men truyền cực đại (MTTE) . . . . . . . . . . . . . . . . . . .
19
1.5. Nhiệm vụ của đồ án . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
20
Chương 2. Xây dựng mơ hình của xe và ước lượng tỉ số trượt . . . . . . . . . . . . . . . . .
22
2.1. Mơ hình động lực học của xe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
22
2.2. Ước lượng tỉ số trượt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
24
Chương 3. Xây dựng bộ điều khiển lực phát động trên xe ô tô điện . . . . . . . . . . .
26
3.1. Phương pháp ước lượng mô men truyền cực đại (MTTE) . . . . . . . . . . . . . .
26
3.2. Đề xuất cải tiến phương pháp MTTE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
28
1
MỤC LỤC
3.3. Mô phỏng kiểm chứng phương pháp . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
30
3.3.1. Mơ hình xe điện . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
30
3.3.2. Kết quả mô phỏng . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
30
Chương 4. Thực nghiệm trên mơ hình Hardware-in-the-loop . . . . . . . . . . . . . . . . .
35
4.1. Mô phỏng Hardware-in-the-loop . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
35
4.2. Xây dựng hệ thống mô phỏng HIL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
35
4.2.1. Bộ vô lăng chân ga . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
36
4.2.2. Giới thiệu về DS1103 PPC board . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
37
4.2.3. Bộ điều khiển - Kit eZdsp F28335 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
38
4.2.4. Mạch chuyển đổi tín hiệu analog . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
39
4.3. Triển khai đối tượng và bộ điều khiển trên thiết bị phần cứng . . . . . . . . .
40
4.3.1. Triển khai mơ hình xe ơ tơ điện trên card DS1103 . . . . . . . . . . . . . . . . . . . . . . . . .
40
4.3.2. Triển khai bộ điều khiển trên kit F28335 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
40
Chương 5. Kết quả thực nghiệm trên mơ hình HIL . . . . . . . . . . . . . . . . . . . . . . . . . .
43
5.1. Kịch bản thực nghiệm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
43
5.2. Kết quả thực nghiệm HIL. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
43
5.3. Nhận xét kết quả . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
44
Kết luận . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
51
Phụ lục . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
52
Tài liệu tham khảo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
54
2
DANH SÁCH HÌNH VẼ
DANH SÁCH HÌNH VẼ
1.1
Xe bị trượt khi đi vào đường trơn . . . . . . . . . . . . . . . . . . . . . . . 10
1.2
Cơ cấu phần cứng của bộ điều khiển traction control ở xe xăng . . . . . . . 11
1.3
Mối quan hệ giữa tỉ số trượt λ và hệ số ma sát µ
1.4
Cảm biến lắp trên bánh xe . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.5
Phương pháp ước lượng tỉ số trượt theo Fujimoto . . . . . . . . . . . . . . 15
1.6
Bộ điều khiển PI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
1.7
Cấu hình điều khiển phương pháp SMC . . . . . . . . . . . . . . . . . . . 18
1.8
Phương pháp ước lượng mô men truyền cực đại (MTTE) . . . . . . . . . . 20
2.1
Mơ hình động lực học của ô tô trên một bánh . . . . . . . . . . . . . . . . 23
2.2
Mơ hình xe trên một bánh . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.3
Phương pháp ước lượng tỉ số trượt . . . . . . . . . . . . . . . . . . . . . . 25
3.1
Phương pháp ước lượng mô men truyền cực đại (MTTE) . . . . . . . . . . 27
3.2
Phương pháp ước lượng mô men cực đại đề xuất . . . . . . . . . . . . . . . 29
3.3
Mơ hình xe điện trên simulink . . . . . . . . . . . . . . . . . . . . . . . . 31
3.4
Thay đổi điều kiện mặt đường . . . . . . . . . . . . . . . . . . . . . . . . 32
3.5
Kết quả mơ phỏng khi khơng có điều khiển . . . . . . . . . . . . . . . . . 33
3.6
Kết quả mô phỏng khi có điều khiển . . . . . . . . . . . . . . . . . . . . . 34
4.1
Mô phỏng Hardware-in-the-loop . . . . . . . . . . . . . . . . . . . . . . . 36
4.2
Cấu hình phần cứng của mơ hình HIL . . . . . . . . . . . . . . . . . . . . 36
4.3
Bộ vô lăng và chân ga BETOP 3181 . . . . . . . . . . . . . . . . . . . . . 37
4.4
Thư viện Simulink cho Board DS1103 . . . . . . . . . . . . . . . . . . . . 39
3
. . . . . . . . . . . . . . 13
DANH SÁCH HÌNH VẼ
4.5
Phần cứng đối tượng mơ phỏng và bộ điều khiển . . . . . . . . . . . . . . . 39
4.6
Triển khai hệ thống mô phỏng HIL . . . . . . . . . . . . . . . . . . . . . . 40
4.7
Mơ hình đầy đủ của xe điện . . . . . . . . . . . . . . . . . . . . . . . . . . 41
4.8
Triển khai đối tượng và bộ điều khiển trên phần cứng . . . . . . . . . . . . 42
5.1
Kết quả thực nghiệm khi khơng có điều khiển . . . . . . . . . . . . . . . . 46
5.2
Kết quả thực nghiệm khi sử dụng bộ điều khiển MTTE . . . . . . . . . . . 47
5.3
Kết quả thực nghiệm với κ = 2.78 . . . . . . . . . . . . . . . . . . . . . . 48
5.4
Kết quả thực nghiệm với κ = 20 . . . . . . . . . . . . . . . . . . . . . . . 49
5.5
Kết quả thực nghiệm với κ = 50 . . . . . . . . . . . . . . . . . . . . . . . 50
6
Mạch nguyên lý . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
7
Sản phẩm thực tế . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
4
DANH SÁCH BẢNG
DANH SÁCH BẢNG
2.1
Hệ số trong công thức của Pacejka theo điều kiện mặt đường . . . . . . . . 23
3.1
Bảng thông số của xe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
4.1
Thông tin kỹ thuật của DS1103 . . . . . . . . . . . . . . . . . . . . . . . . 38
5
DANH MỤC TỪ VIẾT TẮT
DANH MỤC TỪ VIẾT TẮT
EV
Electrical Vehicle
Xe ô tô điện
ICE
Internal Combustion Engine
Động cơ đốt trong
ESC
Electronic Stability Control
Điều khiển ổn định
ABS
Anti-locking Breaking System
Hệ thống chống bó cứng phanh
TC
Traction Control
Điều khiển lực phát động
TCS
Traction Control System
Hệ thống điều khiển lực phát động
MTTE Maximum Torque Transmision Estimation Ước lượng mô men truyền cực đại
6
LỜI MỞ ĐẦU
LỜI MỞ ĐẦU
Hiện nay, xe ô tô điện đang phát triển mạnh mẽ trên toàn thế giới và trong tương lai
sẽ trở thành phương tiện di chuyển chính của con người thay thế cho các ô tô động cơ
đốt trong truyền thống. Nguyên nhân của xu thế phát triển này đến từ sự cạn kiệt của các
nguồn tài ngun nhiên liệu đốt và tình trạng ơ nhiễm mơi trường trầm trọng do sự phát
thải khí CO2 của các loại phương tiện hiện hành. Theo ước tính, nếu cứ tiếp tục mức tiêu
thụ nhiên liệu như hiện nay thì toàn bộ lượng dầu mỏ trên thế giới sẽ cạn kiệt sau 50
năm nữa[1]. Xe điện chính là giải pháp cho tình trạng thiếu hụt năng lượng cho tương
lai. Khơng chỉ có vậy, xe điện cịn được thừa hưởng những ưu điểm nổi trội của động cơ
điện so với động cơ đốt trong, đó là khả năng điều khiển mơ men nhanh và chính xác.
Chính những ưu điểm này đã mở ra những tiềm năng rất lớn trong lĩnh vực điều khiển
chuyển động của xe điện.
Hệ thống điều khiển động lực học của xe nhằm cải thiện độ an toàn và hiệu quả vận
hành của là được gọi là chung ESC. Theo thống kê, hệ thống ESC giúp giảm các tai nạn
nghiêm trọng ở ô tô từ 30% - 50%, đặc biệt là trên các tai nạn trên đường trơn [2]. Một
trong những lĩnh vực được quan tâm nhất trong điều khiển ESC chính là hệ thống điều
khiển lực kéo hay còn gọi là Traction Control System (TCS) . Chức năng cơ bản nhất
của điều khiển lực kéo chính là duy trì lực lái cho bánh xe khi xe di chuyển một cách ổn
định nhằm tránh việc bánh xe bị trượt trong quá trình di chuyển trên những địa hình trơn
trượt, bằng việc điều khiển mô men đầu ra của động cơ. Từ đó tăng độ an tồn và tin cậy
cho xe ô tô điện.
Hiện nay, hệ điều khiển lực kéo trên các xe động cơ đốt trong sử dụng hệ thống phanh
cơ khí là chính. Trên xe ơ tơ điện, lượng mô men đầu ra của động cơ được điều khiển trực
tiếp bởi bộ điều khiển, từ đó tăng tốc độ đáp ứng và độ chính xác. Có nhiều cơng trình
nghiên cứu đã được thực hiện như: bộ điều khiển PI [3], Sliding Mode Control (SMC)
[4; 5], ước lượng mô men truyền cực đại (MTTE) [6]...tuy nhiên các phương pháp này
vẫn gặp nhiều vấn đề trong áp dụng thực tế.
Từ những lí do trên, nhóm đồ án chúng em đã chọn thực hiện đề tài "Điều khiển lực
7
LỜI MỞ ĐẦU
kéo cho ô tô điện trên cơ sở ước lượng tỉ số trượt". Với mục tiêu hạn chế độ trượt của
ô tô điện khi đi vào đường trơn, đồng thời giúp tiết kiệm năng lượng cho xe mà không
làm giảm khả năng tăng tốc của xe.
Đồ án tập trung làm rõ một số vấn đề sau: Trình bày các khái niệm cơ bản trong điều
khiển lực kéo, mô hình động lực học của xe ơ tơ, trình bày nội dung phương pháp ước
lượng tỉ số trượt, phương pháp điều khiển đề xuất và cuối cùng là các kết quả đạt được
khi áp dụng phương pháp trên mơ hình Signal Hardware-in-the-loop.
Bố cục của khóa luận bao gồm 4 chương:
• Chương 1: Giới thiệu chung về điều khiển lực kéo, tỉ số trượt và các cơng trình đã
cơng bố.
• Chương 2: Xây dựng mơ hình động lực học của xe điện và phương pháp ước lượng
tỉ số trượt.
• Chương 3: Xây dựng phương pháp điều khiển lực kéo cho ô tơ điện.
• Chương 4: Xây dựng mơ hình thực nghiệm Hardware-in-the-loop.
• Chương 5: Kết quả thực nghiệm.
Để có thể hồn thành đồ án này, em xin cảm ơn thầy ThS.Võ Duy Thành đã giúp đỡ
chúng em trong quá trình thực hiện đề tài này.
Trong q trình làm đồ án khơng tránh được những sai sót, em mong nhận được sự
góp ý của thầy, cơ để có thể hồn chỉnh đồ án của mình.
Hà Nội, ngày 31 tháng 05 năm 2018
Sinh viên
Lê Đức Lộc
8
Chương 1. Giới thiệu chung
CHƯƠNG 1
GIỚI THIỆU CHUNG
1.1.
Hệ thống điều khiển lực kéo trên xe ô tô điện (TCS)
Điều khiển lực kéo là phương pháp điều khiển mô men đầu ra của động cơ nhằm mục
đích chống trượt cho xe, duy trì lực kéo trên bánh xe khi di chuyển trên đường có điều
kiện trơn trượt như: đường ướt, đường tuyết...Khi xe đi hay tăng tốc trên mặt đường này,
các bánh xe dễ dàng bị trượt do lực ma sát giữa bánh xe và mặt đường giảm dẫn đến tình
trạng mất cân bằng xe, rất dễ xảy ra tai nạn (Hình 1.1). Do đó, hệ thống điều khiển lực
kéo (TCS) là hệ thống không thể thiếu trên các xe ô tô thương mại hiện nay.
Độ trượt của xe được đặc trưng bởi tỉ số trượt, tỉ số này được tính theo hiệu giữa vận
tốc bánh xe và vận tốc dài của xe. Trong điều kiện bình thường, vận tốc bánh xe và vận
tốc dài của xe xấp xỉ nhau, tỉ số trượt nằm trong khoảng ổn định, xe vận hành tin cậy,
an toàn. Tuy nhiên, khi xe đi vào đường trơn, độ bám đường của bánh xe giảm còn rất
thấp, vận tốc của bánh tăng lên trong khi vận tốc xe lại giảm đi khiến cho tỉ số trượt tăng
mạnh, khi ấy xe rất dễ bị mất lái gây mất an tồn cho người ngồi trên xe. Vì vậy, tỉ số
trượt là biến điều khiển quan trọng trong bài toán điều khiển lực kéo.
Với hệ thống điều khiển lực kéo hiệu quả, tỉ số trượt luôn được giữ trong khoảng ổn
định, hiện tượng trượt của xe sẽ được hạn chế, giúp tăng độ an toàn và tin cậy cho xe,
đồng thời cải thiện hiệu năng của xe trong qua quá trình lái.
Hiện nay, hầu hết các xe ơ tơ thương mại đều lắp đặt hệ thống điều khiển lực kéo.
Hình 1.2 trình bày các cơ cấu của bộ điều khiển lực kéo ở xe sử dụng động cơ đốt trong
(ICE). Trong các xe này, các cảm biến được gắn trên các bánh xe nhằm cung cấp trạng
thái của các bánh xe. Từ các giá trị cảm biến đưa về, bộ điều khiển sẽ tính tốn tỉ số
trượt nhằm xác định trạng thái trượt của xe. Nếu xe bị trượt mạnh, bộ điều khiển sẽ thực
hiện giảm mô men đầu ra bằng cách tác động lên động cơ xe kết hợp với hệ thống phanh
cơ khí. Về cơ bản, hệ thống điều khiển lực khéo tương tự như hệ thống chống bó cứng
9
Chương 1. Giới thiệu chung
Hình 1.1: Xe bị trượt khi đi vào đường trơn
phanh (ABS), cả hai đều được thiết kế để duy trì độ bám của lốp trên đường, tuy nhiên,
với TCS thì đó là trong q trình tăng tốc cịn ABS sử dụng trong q trình giảm tốc và
phanh.
Nhược điểm của hệ thống TCS trên xe ô tô truyền thống đó là phụ thuộc vào hệ thống
phanh và van cơ khí nên tốc độ đáp ứng chậm và gây hao phí năng lượng khi phanh.
So với ơ tơ truyền thống, ngồi đặc điểm thân thiện với mơi trường, ô tô điện còn
được thừa hưởng những ưu điểm của động cơ điện so với động cơ đốt trong trong lĩnh
vực điều khiển [7]. Nổi bất nhất đó là 4 đặc điểm sau đây:
1. Động cơ điện có thể huy động mơ men nhanh và chính xác.
Đây là ưu điểm nổi trội nhất của động cơ điện so với động cơ đốt trong. Tốc độ đáp
ứng mô men của động cơ điện chỉ cỡ vài mili giây, nhanh hơn động cơ đốt trong
hay hệ thống phanh cơ khí gấp 10- 100 lần. Đặc điểm này giúp cho hệ thống điều
khiển làm việc nhanh và chính xác hơn. Từ đó, tính an tồn và ổn định của xe được
cải thiện, góp phần tiết kiệm năng lượng cho xe.
2. Động cơ có thể được gắn vào từng bánh xe.
Nhờ sự phát triển của lĩnh vực thiết kế động cơ, các động cơ điện giờ đây có kích
thước nhỏ gọn, phù hợp để gắn trực tiếp vào từng bánh xe ô tô và có thể sinh ra các
mơ men khác nhau ở các bánh xe trái - phải. Điều này giúp cho nhà sản xuất có thể
thiết kế các hệ thống truyền động một cách linh hoạt nhằm tăng tính hiệu quả của
10
Chương 1. Giới thiệu chung
Hình 1.2: Cơ cấu phần cứng của bộ điều khiển traction control ở xe xăng
các hệ thống điều khiển. Trái với xe ô tô điện, các xe sử dụng động cơ đốt trong chỉ
có thể sử dụng một động cơ kết hợp với hệ thống vi sai cơ khí, dẫn đến việc thiết
kế các phương án điều khiển bị hạn chế.
3. Cho phép đo mô men động cơ một cách chính xác. Bằng việc đo được mơ men
của động cơ thơng qua dịng điện, các nhà thiết kế hồn tồn có thể thiết kế những
bộ quan sát lực kéo khi tăng tốc, cũng như lực hãm khi phanh xe. Từ đó, nhiều mơ
hình điều khiển có thể được áp dụng trên xe điện với những mục đích khác nhau.
4. Động cơ điện có thể được điều khiển thông qua các biến liên tục như mô men hay
vận tốc thay vì chỉ dùng điều khiển on - off trên van của phanh và động cơ đốt
trong. Nhờ đó, hệ thống điều khiển có thể làm việc liên tục dưới mọi điều kiện chứ
khơng cịn bị bó buộc ở việc chỉ dùng trong trường hợp khẩn cấp.
Từ các ưu điểm trên, có thể thấy việc điều khiển chuyển động trên xe ơ tơ điện có
nhiều điểm thuận lợi hơn so với điều khiển ô tô truyền thống. Các thông số về mô men,
trạng thái hoạt động của xe là vấn đề nan giải đối với ô tô sử dụng động cơ đốt trong
nay hồn tồn có thể được giải quyết trên xe ơ tơ điện. Vì vậy, lĩnh vực điều khiển ơ tơ
điện có rất nhiều tiềm năng để khám phá, các phương pháp điều khiển chuyển động, điều
khiển lực kéo có thể áp dụng một cách dễ dàng và chính xác trên xe điện.
11
Chương 1. Giới thiệu chung
1.2.
Tỉ số trượt
1.2.1.
Định nghĩa tỉ số trượt
Trong bài tốn điều khiển lực kéo thì khơng thể bỏ qua khái niệm tỉ số trượt, một yếu
tố quan trọng trong điều khiển lực kéo. Tỉ số trượt là tỉ số giữa hiệu giữa vận tốc của
bánh xe và xe, chia cho giá trị lớn nhất của hai vận tốc. Tỉ số trượt được định nghĩa theo
công thức sau[8]:
Rω −Vx
(tăng tốc)
Rω
λ=
Vx − Rω (phanh)
Vx
(1.1)
Trong đó,
Vx là vận tốc dài của xe.
là bán kính bánh xe.
R
ω là tốc độ quay của bánh xe.
Tỉ số trượt trong quá trình tăng tốc được biểu diễn bởi công thức (1.2):
λ=
Rω −Vx
Rω
(1.2)
Trong trường hợp lý tưởng, điều kiện mặt đường ở các bánh phát động giống nhau thì
tỉ số trượt sẽ bằng nhau. Ngược lại, khi đi trên mặt đương không đồng nhất, tỉ số trượt sẽ
khác nhau. Do đó, việc quan sát tỉ số trượt sẽ cung cấp cho hệ thống điều khiển thông
tin về điều kiện mặt đường, trạng thái xe, từ đó đưa ra tín hiệu điều khiển kịp thời.
1.2.2.
Mối quan hệ giữa tỉ số trượt và lực ma sát
Mối quan hệ giữa tỉ số trượt và mặt đường là mối quan hệ phi tuyến, phụ thuộc vào
đặc điểm của lốp xe cũng như điều kiện mặt đường. Để thể hiện mối quan hệ này, Pacejka
đã đề xuất công thức tính hệ số ma sát từ tỉ số trượt thơng qua các số liệu thực nghiệm
được gọi là công thức "Magic Formula"[8; 9].
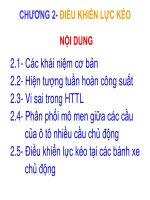
Mối quan hệ phi tuyến giữa tỉ số trượt (λ ) và hệ số ma sát (µ) trong quá trình tăng
tốc được biểu diễn dưới dạng đồ thị như hình 1.3. Có thể thấy, đường đặc tính λ − µ
ở trong các điều kiện mặt đường khác nhau đều có đặc điểm chung đó là, giá trị hệ số
ma sát µ tăng dần khi λ tăng và µ đạt giá trị cực đại khi λ = λ ∗ (0.1 ≤ λ ≤ 0.2). Điểm
12
Chương 1. Giới thiệu chung
1
Đường khô
Đường ướt
Đường tuyết
Hệ số ma sát ( )
0.8
0.6
0.4
0.2
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
Tỉ số trượt ( )
Vùng ổn định
Vùng không ổn định
Hình 1.3: Mối quan hệ giữa tỉ số trượt λ và hệ số ma sát µ
cực đại này chia đường đặc tính làm 2 vùng: vùng ổn định và vùng mất ổn định. Trong
vùng ổn định, mối quan hệ µ − λ có thể coi là tuyến tính. Đây là vùng thuận lợi cho việc
thực hiện các phương pháp điều khiển lực kéo. Trong vùng không ổn định, tỉ số trượt có
quan hệ phi tuyến với hệ số ma sát, tỉ số trượt càng lớn thì lực ma sát càng giảm, độ bám
đường càng giảm dễ gây mất lái. Các phương pháp điều khiển hiện nay đều tập trung giữ
cho tỉ số trượt nằm trong vùng ổn định của đường đặc tính µ - λ .
1.2.3.
Tầm quan trọng của tỉ số trượt
Từ những phân tích ở phần trên, có thể thấy tỉ số trượt là yếu tố tiên quyết trong điều
khiển lực kéo:
• Nhiệm vụ của điều khiển lực kéo chính là điều khiển mơ men sao cho giữ giá trị λ
nằm trong khoảng ổn định (λ ∗ ≤ 0.2) để giảm trượt cho xe, tăng độ an toàn đồng
thời giảm hao phí năng lượng làm quay lốp vơ ích (khơng sinh ra chuyển động tịnh
tiến).
• Lực kéo dọc trục của xe phụ thuộc vào tỉ số trượt. Mối quan hệ giữa tỉ số trượt và
lực kéo dọc trục cũng có dạng tương tự đường đặc tính giữa µ - λ (hình 1.3) do
mối quan hệ tỉ lệ giữa lực kéo (Fk ) và hệ số ma sát (µ) theo phương trình Fk = µN
với N là phản lực của đất lên xe ơ tơ. Có thể thấy, để xe có thể di chuyển thì nhất
13
Chương 1. Giới thiệu chung
Hình 1.4: Cảm biến lắp trên bánh xe
thiết phải có độ trượt nhất định, từ đó sinh ra lực kéo xe tiến lên phía trước. Tuy
nhiên, nếu tỉ số trượt lớn, lực phát động khơng cịn tỉ lệ với tỉ số trượt. Điều này
có nghĩa là khơng cịn điều khiển được lực lái nữa, xe bị trượt, dẫn đến hiện tượng
mất lái khi vận hành.
1.3.
Các phương pháp ước lượng tỉ số trượt
Để điều khiển lực kéo cần phải biết thông tin về tỉ số trượt trong q trình chuyển
động của ơ tơ. Các nghiên cứu về ước lượng tỉ số trượt rất đa dạng, tuy nhiên, có thể tựu
chung lại chủ yếu dựa trên 2 phương pháp chính: đo trực tiếp thơng qua vận tốc dài và
ước lượng không thông qua vận tốc.
1.3.1.
Phương pháp đo trực tiếp
Để tính tốn tỉ số trượt của xe cần phải biết được vận tốc dài và vận tốc bánh xe thông
qua các cảm biến gia tốc và encoder lắp trên bánh xe. Tuy nhiên, vấn đề không thể tránh
khỏi của việc sử dụng cảm biến để đo vận tốc đó là các sai số offset của q trình tích
phân gia tốc. Ngồi ra khơng thể khơng nhắc tới các vấn đề về kinh tế khi sử dụng các
cảm biến đắt tiền, điều đó sẽ khiến cho giá thành của ơ tô tăng vọt.
1.3.2.
Phương pháp ước lượng không thông qua đo vận tốc
Từ những hạn chế trên, rõ ràng, các phương pháp truyền thống hầu như không khả
thi để thu thập chính xác dữ liệu về tỉ số trượt. Điều này mở ra một hướng đi khác đó
là ước lượng thơng qua mơ hình động lực học của xe ơ tơ. Các nghiên cứu đã đạt được
những kết quả nhất định và đã có nhiều cơng trình đăng ký bằng sáng chế. Năm 2007,
14
Chương 1. Giới thiệu chung
V
T
MƠ HÌNH Ơ TƠ
J
ˆ
T
1 2 w 2
R M R M
,
ˆ
Hình 1.5: Phương pháp ước lượng tỉ số trượt theo Fujimoto
Fujimoto đã đề xuất sử phương án ước lượng tỉ số trượt không thông qua vận tốc[10], tỉ
số trượt (λ ) được ước lượng qua công thức sau:
ω˙
Jw
˙
λˆ = − λˆ + 1 + 2
ω
R M
ω˙
T
− 2
ω R Mω
(1.3)
Trong đó, các thơng số ở vế phải đều có thể đo được bằng cảm biến.
ω
:tốc độ quay của bánh xe
R
:bán kính bánh xe
Jw :mơ men qn tính của bánh xe.
M :Khối lượng của xe.
Nhận xét: Mặc dù đạt được kết quả ước lượng chính xác nhưng phương pháp này vẫn
tồn tại các hạn chế dẫn đến sai số. Các tham số trong phương pháp trên hoặc thay đổi
liên tục trong q trình vận hành hoặc khơng thể đo đạc chính xác như: khối lượng, bán
kính bánh xe và mơ men qn tính của bánh xe. Khi các tham số này thay đổi thì kết quả
ước lượng cũng sẽ bị sai lệch, thậm chí sai lệch lớn.
1.4.
Các cơng trình điều khiển lực kéo đã được cơng bố
Đã có rất nhiều phương pháp được đề xuất trong lĩnh vực điều khiển lực kéo, tuy
nhiên dựa trên kết quả đầu ra (tỉ số trượt) của bộ điều khiển có thể chia làm 3 nhóm
chính: nhóm điều khiển chính xác tỉ số trượt, điều khiển tỉ số trượt trong khoảng ổn định
và phương pháp ước lượng mô men truyền cực đại.
15
Chương 1. Giới thiệu chung
Trong nhóm điều khiển chính xác tỉ số trượt, phương pháp điều khiển chính là điều
khiển Sliding Mode Control (SMC).
Trong nhóm điều khiển tỉ số trượt trong khoảng ổn định, phương pháp chính là tuyến
tính hóa quanh điểm làm việc kết hợp bộ điều khiển PI.
Phương pháp uớc lượng mô men cực đại (MTTE) là phương pháp hạn chế độ trượt
nằm trong khoảng ổn định của đường đặc tính µ − λ
1.4.1.
Điều khiển tỉ số trượt trong khoảng ổn định
Phương pháp này xây dựng bộ điều khiển PI cho mơ hình tuyến tính hóa động học
của xe[7; 11]. Bằng phương pháp tuyến tính hóa xung quanh điểm làm việc, có thể rút
ra được mối quan hệ giữa tỉ số trượt và mô men động cơ (được quy đổi ra lực) như sau:
∆λ
M(1 − λ )
1
1
=
∆Fm Na Mω + M(1 − λ ) τs + 1
Với,
M
(1.4)
: khối lượng xe.
Mω
: mơ men qn tính (quy đổi theo khối lượng).
Fm
: Mô men động cơ (quy đổi theo lực).
a
: gradient của đường đặc tính λ − µ tại điểm làm việc.
Vω0 : điểm làm việc của vận tốc bánh xe.
τ
: hằng số thời gian được tính bằng cơng thức:
τ=
MMω Vω0
1
Na Mω + M(1 − λ )
(1.5)
Từ đó, bộ điều khiển PI được tổng hợp theo phương pháp bù điểm cực có dạng như sau:
K
1 + τs
s
(1.6)
Phương pháp điều khiển tỉ số trượt trong khoảng ổn định được có cấu hình như hình
1.6. Trong sơ đồ cấu trúc điều khiển, mơ men đặt cho xe là mô men bé hơn giữa mô men
từ chân ga và mô men từ bộ điều khiển PI. Trong điều kiện đường bình thường, mơ men
từ chân ga người lái sẽ nhỏ hơn và sẽ được chọn để đưa vào động cơ, trong điều kiện
đường trơn, mơ men từ bộ điều khiển sẽ được chọn. Chính bởi việc thay đổi giá trị đặt
này mà tỉ số trượt luôn được giữ trong một khoảng ổn định.
16
Chương 1. Giới thiệu chung
T người lái
Select
low
T*
VX
Mơ hình xe điện
V
T điều khiển
Bộ điều khiển PI
optimal
Khoảng ổn định
Hình 1.6: Bộ điều khiển PI
Nhận xét: Phương pháp dùng bộ điều khiển PI gặp phải hạn chế do tham số mơ hình
và điểm làm việc thay đổi trong quá trình vận hành xe dẫn đến mơ hình đối tượng thay
đổi làm cho kết quả điều khiển bị sai lệch lớn.
1.4.2.
Điều khiển chính xác tỉ số trượt
Trở ngại lớn nhất để triển khai thực tế phương pháp trên đó chính là các tham số mơ
hình khơng cố định và phi tuyến như khối lượng của xe thay đổi theo số hành khách, điều
kiện bánh xe, mặt đường. Để có thể vận hành tốt trong các điều kiện khác nhau cần phải
có một bộ điều khiển có độ bền vững cao với các tham số thay đổi. Phương pháp điều
khiển Sliding Mode Control (SMC) đã được áp dụng vào bài toán tỉ số trượt[5; 12; 4]
nhằm giải quyết vấn đề này. Trong phương pháp này, tỉ số trượt được điều khiển theo
một giá trị mong muốn bất kể các thay đổi của tham số mô hình cũng như điều kiện mặt
đường. Giá trị cố định mà bộ điều khiển hướng tới là λoptimal , là giá trị mà tại đó hệ số
ma sát lớn nhất (µmax ). Do đó, lực kéo trên bánh xe sẽ ln được duy trì ở mức lớn nhất.
Hình 1.7 biểu diễn cấu trúc điều khiển của phương pháp SMC. Trong quá trình làm
việc, bộ điều khiển sẽ dựa vào sai lệch giữa tỉ số trượt thực và tỉ số trượt đặt để đưa ra
mô men TSMC âm hay dương bù vào lượng mô men đặt từ chân ga của người lái. Trong
trường hợp khi xe đi vào đường trơn, tỉ số trượt tăng mạnh, hệ thống điều khiển sẽ ngay
lập tức làm giảm mô men đầu ra của động cơ, làm giảm tỉ số trượt về mức giá trị đặt.
17
Chương 1. Giới thiệu chung
T chân ga
Mơ hình xe
VX
TSMC
Bộ điều khiển
SMC
Bộ ước lượng tỷ
số trượt
optimal
Hình 1.7: Cấu hình điều khiển phương pháp SMC
Luật điều khiển của phương pháp SMC có dạng như sau:
1
TSMC = (− f − Ksign(e))
b
(1.7)
Trong đó,
(1 − λ )R
JwVω
r2 M
g
1 + (1 − λ )
µ
f =−
Vω
Jw
b=
e = λ − λoptimal
Với
R
: bán kính bánh xe
Jw
: mơ men qn tính của bánh xe
Vω
: tốc độ bánh xe, được tính bằng Vω = Rω.
Nhận xét: nhược điểm của phương pháp chính là tín hiệu mơ men điều khiển bị
chattering rất mạnh do có do có chứa thành phần khơng liên tục trong luật điều khiển.
Hiện nay, có rất nhiều cơng trình nghiên cứu phương pháp để giảm chattering trong SMC
ví dụ như: SMC với tích phân (SMC-CI)[5] hay SMC bậc 2 (SSMC) [13]. Các phương
pháp trên cải thiện được chất lượng điều khiển nhưng khó áp dụng thực tế do cần phải
ước lượng nhiều tham số. Ngồi ra, để tìm được giá trị λoptimal cần phải có phần cứng
và phương pháp ước lượng rất phức tạp và tốc độ tính toán cao, do điều kiện mặt đường
thay đổi liên tục.
18
Chương 1. Giới thiệu chung
1.4.3.
Phương pháp ước lượng mô men truyền cực đại (MTTE)
Phương pháp điều khiển chống trượt trên cơ sở giới hạn mô men truyền cực đại
(MTTE) được xây dựng để tránh đi mối quan hệ phi tuyến giữa tỉ số trượt và hệ số ma sát
do không thể kiểm sốt chính xác được mối quan hệ giữa chúng, được đề xuất bởi Yin
và Hori năm 2009 [14]. Trong phương pháp MTTE, mô men đầu ra cực đại của động cơ
được giới hạn thông qua ước lượng lực kéo của xe và tỉ số giữa gia tốc dài của bánh xe
và gia tốc dài của xe, gọi là α. Thơng qua các phương trình động học của xe, mơ men
đầu ra cực đại của động cơ được tính theo công thức sau:
Tmax = (
Jw
+ 1)Fˆk R
αM 2 R
(1.8)
Trong đó,
M
: Khối lượng của xe
Vx
: Vận tốc dài của xe.
Jw : Mơ men qn tính của bánh xe
R
: Bán kính bánh xe
α
: tỉ số giữa gia tốc của bánh xe và gia tốc của xe. α =
Fˆk
: lực phát động của xe tính thơng qua bộ quan sát:
Tm − Jw ω˙
Fˆk =
R
V˙x
V˙ω
(1.9)
Cấu hình điều khiển của phương pháp MTTE được thể hiện thơng qua hình 1.8. Đầu
vào của bộ điều khiển là mô men từ bàn đạp chân ga của người lái và vận tốc dài của
bánh xe sau khi được lọc qua bộ lọc thông thấp để giảm nhiễu. Sau đó, mơ men cực đại,
Tmax được tính tốn thơng qua lực kéo Fˆk , sẽ được dùng để giới hạn mô men đặt từ chân
ga của người lái.
Nhận xét: Khác với các phương pháp trên, phương pháp ước lượng mô men cực đại
(MTTE) cho phương thức điều khiển đơn giản và kết quả điều khiển khá tốt trên mặt
đường trơn với giá trị α đặt trước, ở đây, tác giả chọn α = 0.9. Tuy nhiên, các kết quả
này được thí nghiệm ở vùng tốc độ thấp (≈ 3m/s). Cịn ở vùng tốc độ cao thì phương
pháp thể hiện nhiều hạn chế trong việc hạn chế tỉ số trượt. Giá trị α được chọn chủ yếu
19
Chương 1. Giới thiệu chung
Tmax
T*
T
Mơ hình ơ tơ
V
Tmax
Tmax
1
1
1s 1
2s 1
1
R
J ws
R2
Fˆk
J w M .R 2
MR
Hình 1.8: Phương pháp ước lượng mơ men truyền cực đại (MTTE)
dựa theo kinh nghiệm, không phản ánh được các trạng thái của xe, mặt đường trong quá
trình di chuyển, khiến cho kết quả điều khiển khơng chính xác trong một số trường hợp.
1.5.
Nhiệm vụ của đồ án
Từ các phân tích ở phần trước, có thể thấy ước lượng tỉ số trượt và điều khiển lực
kéo hiện đang là một phần không thể thiếu đối với các xe ô tơ, đặc biệt là xe ơ tơ điện.
Các cơng trình nghiên cứu điều khiển lực kéo đã được công bố đến nay đều đã cho kết
quả khả quan nhưng vẫn cịn nhiều hạn chế. Nhóm đồ án nhận thấy phương pháp "Ước
lượng mô men truyền cực đại" rất khả thi trong triển khai thực tế, vì vậy nhóm quyết
định nghiên cứu và đề xuất phương án cải tiến phương pháp này thông qua đề tài: "Điều
khiển lực kéo cho ô tô điện trên cơ sở ước lượng tỉ số trượt" bao gồm các nhiệm vụ
chính sau:
1. Xây dựng mơ hình động lực học của xe ô tô điện.
2. Xây dựng phương pháp ước lượng tỉ số trượt và điều khiển lực kéo TCS trên cơ sở
tỉ số trượt ước lượng được.
3. Triển khai phương pháp trên mơ hình Hardware-in-the-loop sử dụng bộ chân ga vô
lăng, card dSpace DS1103 và eZdsp TMS320F28335.
20
Chương 1. Giới thiệu chung
Kết luận chương
Như vậy, chương 1 đã đưa ra các khái niệm về tỉ số điều khiển lực kéo và tỉ số trượt,
nêu lên tầm quan trọng của điều khiển lực kéo trên ô tô điện và tỉ số trượt trong điều
khiển lực kéo. Cũng trong chương này, các phương pháp ước lượng tỉ số trượt, điều khiển
lực kéo cũng đã được đưa ra giới thiệu và đánh giá. Cuối cùng là các nhiệm vụ chính cần
hồn thành trong q trình thực hiện đồ án.
21
Chương 2. Xây dựng mơ hình của xe và ước lượng tỉ số trượt
CHƯƠNG 2
XÂY DỰNG MƠ HÌNH CỦA XE VÀ ƯỚC LƯỢNG TỈ
SỐ TRƯỢT
2.1.
Mơ hình động lực học của xe
Trong phạm vi của đề tài này, bài toán điều khiển lực phát động chỉ xét đến chuyển
động thẳng của xe nên để giảm khối lượng tính tốn và dễ dàng trong việc đánh giá hiệu
quả của phương pháp, đề tài sẽ đưa ra một vài giả thiết sau:
• Khối lượng của xe phân đều trên 4 bánh xe và xe đang trong q trình tăng tốc.
• Bỏ qua chuyển động quay quanh trục đứng và chuyển động ngang của xe.
• Lực ma sát lăn rất nhỏ nên có thể bỏ qua.
Từ nhưng giả thiết trên, các lực tác dụng lên một bánh của ô tô được biểu diễn như hình
2.1, phương trình động lực học của xe và bánh xe là:
Jw ω˙ = Tm − Fk R
(2.1a)
M v˙ = Fk − Fc
(2.1b)
Vω = Rω
(2.1c)
Fk = µ(λ )N
(2.1d)
N = Mg
(2.1e)
Trong đó:
M
: khối lượng của xe.
Jw
: mơ men qn tính của bánh xe.
Tm : mô men của động cơ điện.
g
: gia tốc trọng trường, g = 9.8
Fk
: Lực phát động tác dụng lên bánh xe.
Fc
: Lực cản khơng khí, được tính theo công thức 2.2
22