Bài giảng Hệ thống lái điều khiển điện tử CĐ Giao thông Vận tải
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (4.55 MB, 118 trang )
ỦY BAN NHÂN THÀNH PHỐ HỒ CHÍ MINH
TRƯỜNG CAO ĐẲNG GIAO THÔNG VẬN TẢI
------
BÀI GIẢNG MÔN HỌC
HỆ THỐNG LÁI ĐIỀU KHIỂN
ĐIỆN TỬ
NGÀNH/NGHỀ: CƠNG NGHỆ KỸ THUẬT Ơ TƠ
TRÌNH ĐỘ:CAO ĐẲNG NGHỀ
Lưu hành nội bộ - Năm 2016
ỦY BAN NHÂN THÀNH PHỐ HỒ CHÍ MINH
TRƯỜNG CAO ĐẲNG GIAO THÔNG VẬN TẢI
------
BÀI GIẢNG MÔN HỌC
HỆ THỐNG LÁI ĐIỀU KHIỂN
ĐIỆN TỬ
NGÀNH/NGHỀ: CƠNG NGHỆ KỸ THUẬT Ơ TƠ
TRÌNH ĐỘ:CAO ĐẲNG NGHỀ
Chủ biên:
ThS. Phan Tiến Vương
Lưu hành nội bộ - Năm 2016
GIỚI THIỆU VỀ MƠN HỌC
a. Vị trí, tính chất mơn học
-Vị trí mơn học: Mơ học được thực hiện sau khi sinh viên đã học xong các mô
học/mô đun thuộc khối kiến thức cơ sở ngành như: Cơ kỹ thuật, Vật liệu và công
nghệ kim loại, Vẽ kỹ thuật, Dung sai lắp ghép và đo lường kỹ thuật, Điện kỹ thuật,
Điện tử cơ bản, Thực tập cơ khí, ... và một số mô đun cơ bản của khối kiến thức
chuyên ngành, cụ thể là: Động cơ ô tô, Khung, gầm ô tô.
Mô đun này được bố trí giảng dạy ở học kỳ 5 của khóa học và có thể bố trí dạy
song song với các mơn học, mơ đun sau: Ngoại ngữ, Thực tập bảo dưỡng – Sửa
chữa hệ thống điều khiển ...
- Tính chất: Là mơn học chun mơn nghề tự chọn.
b. Mục tiêu của môn học:
Kiến thức chuyên môn
- Môn học này cung cấp kiến thức về hệ thống lái điều khiển điện tử trên ô tô.
Hiểu rõ cấu tạo và nguyên lý của hệ thống thống lái trợ lực điện điều khiển điện
tử, hệ thống thống lái trợ lực thủy lực điều khiển điện tử, hệ thống thống lái 4
bánh chủ động điều khiển điện tử.
- Hiểu được các thuật ngữ chuyên ngành dùng cho hệ thống lái điện tử. Có
kiến thức chung về bảo dưỡng và sửa chữa hệ thống lái điều khiển điện tử
Kỹ năng nghề
- Trình bày được cấu tạo và nguyên lý hoạt động của hệ thống lái điện tử. Trình
bày được phương pháp điều khiển hệ thống thống lái điện tử. Xác định được đặc
điểm bảo dưỡng và sửa chữa hệ thống lái điện tử.
- Có kỹ năng phân tích, giải thích và lập luận giải quyết các vấn đề kỹ thuật ô
tô. Kỹ năng làm việc nhóm, giao tiếp và khả năng đọc hiểu các tài liệu kỹ thuật
bằng tiếng Anh hoàn thành tốt nhiệm vụ được giao.
Thái độ lao động
- Rèn luyện cho học sinh thái độ nghiêm túc, tỉ mỉ, chính xác trong thực hiện
cơng việc.
i
- Thái độ biết lắng nghe, ham học hỏi, hứng thú với công nghệ.
- Thái độ cầu tiến, biết tuân thủ nội quy, quy chế của trường, lớp
Các kỹ năng cần thiết khác
Có đạo đức nghề nghiệp, ý thức tổ chức kỷ luật lao động và tôn trọng nội
quy của cơ quan, doanh nghiệp.
Ý thức cộng đồng và tác phong cơng nghiệp, trách nhiệm cơng dân, có thể
làm việc theo nhóm và làm việc độc lập.
Có tinh thần cầu tiến, hợp tác và giúp đỡ đồng nghiệp.
Có lối sống lành mạnh, chân thành, khiêm tốn giản dị; Cẩn thận và trách
nhiệm trong công việc;
Nội dung môn học.
Chương 1: Tổng quan hệ thống lái điều khiển điện tử
Chương 2: Hệ thống lái trợ lực thủy lực điều khiển điện tử
Chương 3: Hệ thống lái trợ lực điện điều khiển điện tử
Chương 4: Hệ thống lái 4 bánh chủ động điều khiển điện tử
Chương 5: Đặc điểm bảo dưỡng và sửa chữa hệ thống lái điều khiển
điện tử
ii
MỤC TIÊU MƠN HỌC
Sau khi học xong mơn học này, người học đạt được:
1. Về kiến thức:
- Trình bày được cấu tạo và nguyên lý hoạt động của các loại hệ thống lái trợ
lực điều khiển điện tử;
- Giải thích được phương pháp điều khiển bộ trợ lực lái của từng loại hệ
thống lái;
- Trình bày được cấu tạo nguyên lý hoạt động của các loại cảm biến sử dụng
trên hệ thống lái trợ lực điều khiển điện tử;
- Phân tích được các nguyên nhân hư hỏng của lái trợ lực điều khiển điện tử;
- Vận dụng các kiến thức vào việc bảo dưỡng, sửa chữa hệ thống lái.
2. Về kỹ năng:
- Kỹ năng lắng nghe; kỹ năng làm việc nhóm; kỹ năng lập kế hoạch và tổ
chức cơng việc;
- Kỹ năng tìm kiếm, tổng hợp, phân tích kết quả và đánh giá thông tin;
- Kỹ năng sử dụng công nghệ thông tin.
3. Về năng lực tự chủ và trách nhiệm:
- Nhận thức được tầm quan trọng môn học Hệ thống lái điều khiển điện tử.
Có năng lực vận dụng các nội dung đã học trong đời sống, học tập và nghề nghiệp.
Phân tích được nguyên lý hoạt động của từng loại hệ thống trợ lực lái.
iii
MỤC LỤC
MỤC TIÊU MÔN HỌC ....................................................................................... iii
MỤC LỤC .......................................................................................................... iv
Danh Mục Hình ................................................................................................... vii
Danh Mục Bảng ................................................................................................... xi
Danh mục chữ viết tắt ......................................................................................... xii
Chương 1:Tổng Quan Hệ Thống Lái Điều Khiển Điện Tử ................................ 13
1.1. Nhiệm vụ ................................................................................................. 13
1.1.1.Công dụng .......................................................................................... 13
1.1.2.Các phương pháp quay vịng của ơ tơ ................................................ 13
1.1.3.Nguyên lý điều khiển hướng chuyển động của ô tô thông dụng ....... 14
1.1.4.Các yêu cầu của kết cấu hệ thống lái ô tô .......................................... 15
1.2. Phân loại ................................................................................................. 16
1.3.Cấu tạo và nguyên lý làm việc hệ thống lái .............................................. 16
1.3.1.Cấu tạo cơ bản của hệ thống lái ......................................................... 16
1.3.2.Nguyên lý làm việc ............................................................................ 17
1.3.3.Tỉ số truyền của hệ thống lái .............................................................. 18
1.3.4.Tác dụng của các góc kết cấu............................................................. 19
1.3.5.Các góc đặt bánh xe ........................................................................... 19
1.3.6.Cơ cấu lái............................................................................................ 27
1.3.7.Dẫn động lái ....................................................................................... 34
Chương 2:Hệ Thống Lái Trợ Lực Thủy Lực Điều Khiển Điện Tử .................... 42
2.1.Cấu tạo cơ cấu lái trợ lực thủy lực điều khiển điện tử .............................. 42
2.1.1.Cấu tạo................................................................................................ 42
2.1.2.Nguyên lý hoạt động của bộ trợ lái .................................................... 46
2.2.Bơm thủy lực và van điều khiển thủy lực ................................................. 48
2.3.Các cảm biến ............................................................................................. 52
2.3.1.Cảm biến tốc độ động cơ.................................................................... 52
2.3.2.Cảm biến tốc độ xe ............................................................................. 54
iv
2.3.3.Cảm biến trợ lực lái ............................................................................ 54
2.4.Bộ điều khiển điện tử ................................................................................ 58
Chương 3:Hệ Thống Lái Trợ Lực Điện Điều Khiển Điện Tử ............................ 62
3.1.Cấu tạo cơ cấu lái trợ lực điện điều khiển điện tử .................................... 62
3.1.1.Tổng quan ........................................................................................... 62
3.1.2.Cấu tạo................................................................................................ 63
3.1.3.Phân loại ............................................................................................. 64
3.2.Động cơ điện điều khiển ........................................................................... 70
3.2.1.Phân loại và yêu cầu động cơ điện ..................................................... 70
3.2.2.Động cơ điện DC................................................................................ 72
3.2.3.Động cơ không đồng .......................................................................... 74
3.2.4.Động cơ đồng bộ ................................................................................ 75
3.2.5.Cảm biến vị trí động cơ điện .............................................................. 77
3.3.Cảm biến mômen xoắn.............................................................................. 79
3.3.1.Phân loại và yêu cầu ........................................................................... 79
3.3.2.Cảm biến mô men với thanh xoắn ..................................................... 80
3.3.3.Cảm biến mô men xoắn không sử dụng thanh xoắn .......................... 84
3.4.Bộ điều khiển điện tử ................................................................................ 85
Chương 4:Hệ Thống Lái 4 Bánh Điều Khiển Điện Tử ....................................... 88
4.1.Cấu tạo hệ thống lái 4WS.......................................................................... 88
4.1.1.Cơ cấu lái phía sau ............................................................................. 90
4.1.2.Cảm biến vị trí góc lái ........................................................................ 91
4.2.Cấu tạo hệ thống lái 4WAS ....................................................................... 97
4.3.Nguyên lý điều khiển hệ thống lái 4 bánh .............................................. 101
Chương 5:Đặc Điểm Bảo Dưỡng Và Sửa Chữa Hệ Thống Lái Điều Khiển Điện
Tử
.............................................................................................. 103
5.1.Đặc điểm bảo dưỡng hệ thống lái điều khiển điện tử ............................. 103
5.1.1.Bảo dưỡng cơ cấu lái........................................................................ 103
5.1.2.Bảo dưỡng dẫn động lái ................................................................... 105
5.1.3.Bảo dưỡng bộ trợ lực lái .................................................................. 106
5.1.4.Bảo dưỡng hệ thống lái điện tử ........................................................ 109
v
5.2.Đặc điểm sửa chữa hệ thống lái điều khiển điện tử. ............................... 109
5.2.1.Sửa chữa cơ cấu lái .......................................................................... 109
5.2.2.Sửa chữa dẫn động lái ...................................................................... 111
5.2.3.Sửa chữa bộ trợ lực lái ..................................................................... 112
5.2.4.Sửa chữa cơ cấu dẫn hướng ............................................................. 114
vi
Danh Mục Hình
Hình 1. 1: Một số dạng kết cấu thay đổi hướng chuyển động của ơ tơ .............. 14
Hình 1. 2: Nguyên lý cơ sở của sự quay vòng ô tô ............................................. 15
Hình 1. 3: Cấu tạo hệ thống lái ........................................................................... 17
Hình 1. 4: Định nghĩa góc nghiêng ngang của bánh xe dần hướng .................... 20
Hình 1. 5: Định nghĩa độ chụm của bánh xe dẫn hướng .................................... 21
Hình 1. 6: Định nghĩa góc nghiêng ngang của trụ đứng ..................................... 22
Hình 1. 7: Kết cấu góc nghiêng ngang trụ đứng trên ơ tơ ................................... 23
Hình 1. 8: Định nghĩa góc nghiêng dọc trụ đứng................................................ 24
Hình 1. 9: Vị trí đo độ chụm của bánh xe dẫn hướng ......................................... 25
Hình 1. 10: Các vị trí điều chỉnh tồng hợp góc két cấu bành xe dẫn hướng....... 26
Hình 1. 11:Cấu tạo cơ cấu trục vít glơbơit - con lăn ........................................... 28
Hình 1. 12: Một số kết cấu con lăn của cơ cấu lái .............................................. 30
Hình 1. 13: Cấu tạo cơ cấu lái trục vít ê cu bi - thanh răng - cung răng ............. 31
Hình 1. 14: Cơ cấu lái bánh răng - thanh răng .................................................... 33
Hình 1. 15: Phương pháp thay đổi tỉ số truyền của cơ cấu lái bánh răng - thanh
răng ...................................................................................................................... 34
Hình 1. 16: Cấu tạo dẫn động lái......................................................................... 35
Hình 1. 17: Tính tốn quan hệ động học của các bảnh xe dẫn hướng ................ 37
Hình 1. 18: Hình thang lải trên hệ treo độc lập ................................................... 38
Hình 1. 19: Hình thang lái trên hệ treo độc lập ................................................... 38
Hình 1. 20: Kết cấu địn quay đứng, địn dọc ..................................................... 39
Hình 1. 21: Két cấu địn quay đứng, địn dọc ..................................................... 40
Hình 1. 22: Sơ đồ dẫn động lái của ơ tơ có hệ treo độc lập ................................ 40
Hình 2. 1: Cấu tạo hệ thống lái trợ lực thủy lực điện tử của hãng Volkswagen . 43
Hình 2. 2: Cấu tạo hệ thống lái trợ lực thủy lực điện tử của hãng Hyundai ....... 43
Hình 2. 3: Cấu tạo van phân phối kiểu xoay ....................................................... 44
Hình 2. 4: Sơ đồ nguyên lý van phân phối kiểu van xoay .................................. 45
vii
Hình 2. 5: Cấu tạo bộ MPU ................................................................................. 45
Hình 2. 6: Sơ đồ nguyên lý hoạt động hệ thống lái trợ lực thủy lực điều khiển điện
tử .......................................................................................................................... 46
Hình 2. 7: Van phân phối ở vị trí trung gian ....................................................... 47
Hình 2. 8: Van phân phối ở vị trí xe quay sang trái ............................................ 48
Hình 2. 9: Van phân phối ở vị trí xe quay sang phải .......................................... 48
Hình 2. 10: Cấu tạo bộ bơ thủy lực và van điều khiển........................................ 49
Hình 2. 11: Nguyên lý điều khiển động cơ PMSM............................................. 50
Hình 2. 12: Biểu đồ nhiệt của động cơ PMSM ................................................... 51
Hình 2. 13: Cấu tạo bơm thủy lực ....................................................................... 52
Hình 2. 14: Đường đặc tính của bơm thủy lực.................................................... 52
Hình 2. 15: Cảm biến tốc độ động cơ ................................................................. 53
Hình 2. 16: Xung tín hiệu cảm biến tốc độ động cơ theo thời gian .................... 54
Hình 2. 17: Cảm biến bị trí góc lái ...................................................................... 55
Hình 2. 18: Cấu trúc cảm biến góc lái điện dung................................................ 56
Hình 2. 19: Cấu tạo cảm biến góc lái điện dung ................................................. 56
Hình 2. 20: Cấu tạo cảm biến góc lái loại Hall ................................................... 57
Hình 2. 21: Xung điện áp cảm biến góc lái loại Hall .......................................... 58
Hình 2. 22: Sơ đồ khối hệ thống điều khiển bộ trợ lực ....................................... 59
Hình 2. 23: Biểu đồ tính tốn áp suất và mơ men đánh lái ................................. 60
Hình 2. 24: Sơ đồ điều khiển hệ thống lái trợ lực thủy lực điều khiển điện tử trên
xe BMW .............................................................................................................. 61
Hình 3. 1: Phân loại một số hệ thống lái EPS theo công suất và lực đánh lái .... 63
Hình 3. 2: Cấu tạo hê thống trợ lực lái EPS ........................................................ 63
Hình 3. 3: Câu tạo hệ thống lái EPSc .................................................................. 65
Hình 3. 4: Cấu tạo hệ thống lái EPSp hãng NXP ................................................ 66
Hình 3. 5: Cấu tạo hệ thống lái EPSdp ............................................................... 66
Hình 3. 6: Một số hệ thống lái EPSdp của hãng ZF ........................................... 67
Hình 3. 7: Hệ thống lái trên xe Porsche 991 ....................................................... 68
viii
Hình 3. 8: Cấu tạo hệ thống lái EPSapa .............................................................. 68
Hình 3. 9: Cấu tạo bộ trợ lực hệ thống lái EPSapa ............................................. 69
Hình 3. 10: Cấu tạo hệ thống lái EPSrc .............................................................. 69
Hình 3. 11: Phân loại động cơ điện theo u cầu các dịng xe ........................... 71
Hình 3. 12: Đường đặc tính động cơ theo yêu cầu hệ thống lái EPS ................. 72
Hình 3. 13: Cấu tạo động cơ DC ......................................................................... 73
Hình 3. 14: Cấu tạo động cơ khơng động bộ 3 pha ............................................ 75
Hình 3. 15: Cấu tạo động cơ điện một chiều không chổi than ........................... 76
Hình 3. 16: Số cực rotor và số cuộn dây trên stator ............................................ 76
Hình 3. 17: Vị trí nam châm trong rotor động cơ điện một chiều không chổi than
............................................................................................................................. 77
Hình 3. 18: Cấu tạo bộ đếm số vịng quay động cơ điện .................................... 78
Hình 3. 19: Phương pháp đo của cảm biến từ trường MR .................................. 79
Hình 3. 20: Cấu tạo cảm biến mô men xoắn cảm ứng trên ô tô.......................... 81
Hình 3. 21: Cấu tạo cảm biến mô men xoắn cảm ứng loại 2 cuộn dây .............. 82
Hình 3. 22: Cấu tạo cảm biến mô men xoắn loại từ tính .................................... 83
Hình 3. 23: Cấu tạo cảm biến mơ men xoắn loại quang ..................................... 84
Hình 3. 24: Cấu tạo cảm biến mô men xoắn không sử dụng thanh xoắn ........... 85
Hình 3. 25: Sơ đồ khối của bộ điều khiển điện tử ECU hệ thống lái EPS.......... 85
Hình 4. 1: Bản đồ MAP của hệ thống EPS điều khiển động cơ điện DC theo tốc
độ xe và cảm biến mơ men xoắn. ........................................................................ 86
Hình 4. 2: So sánh các hệ thống lái .................................................................. 89
Hình 4. 3: Cấu tạo hệ thống lái 4WS .................................................................. 90
Hình 4. 4: Cơ cấu lái phía sau ............................................................................. 90
Hình 4. 5: Cấu tạo cơ cấu vít me bi ..................................................................... 91
Hình 4. 6: Vị trí cảm biến vị trí góc lái phía trước.............................................. 92
Hình 4. 7: Cảm biến vị trí góc lái phía trước ...................................................... 92
Hình 4. 8: Biểu đồ điện áp và góc lái .................................................................. 93
ix
Hình 4. 9: Sơ đồ mạch điện cảm biến góc lái phía trước giao tiếp hộp BCM và bộ
điều khiển 4WS ................................................................................................... 93
Hình 4. 10: Xung điện áp Pha A, Pha B và cực chỉ thị điện áp .......................... 94
Hình 4. 11: Sơ đồ điện áp pha khi vành tay lái quay sang phải .......................... 94
Hình 4. 12: Bộ điều khiển 4WS .......................................................................... 95
Hình 4. 13: Sơ đồ mạch nguồn hộp 4WS............................................................ 95
Hình 4. 14: Sơ đồ mạch điện cơng tắc lựa chọn chế độ lái ................................. 96
Hình 4. 15: Cơng tắc lựa chọn chế độ tay lái ...................................................... 96
Hình 4. 16: Xe di chuyển tốc độ thấp.................................................................. 98
Hình 4. 17: Xe di chuyển ở tốc độ trung bình ..................................................... 98
Hình 4. 18: Xe di chuyển ở tốc độ cao ................................................................ 99
Hình 4. 19: Sơ đồ hệ thống điều khiển 4WAS .................................................... 99
Hình 4. 20: Hệ thống lái 4WAS trên xe BMW 5 (2010) .................................. 100
Hình 4. 21: Cấu tạo cơ cấu điều khiển 4WAS .................................................. 101
Hình 5. 1: Kiểm tra và điều chỉnh khe hở dọc trục tay lái ................................ 103
Hình 5. 2:Kiểm tra và điều chỉnh lực quay vành tay lái ................................... 104
Hình 5. 3: Kiểm tra và điều chỉnh khe hở thanh kéo dọc ................................. 105
Hình 5. 4: Kiểm tra và điều chỉnh độ chụm bánh xe ........................................ 106
Hình 5. 5: Vị trí điều chỉnh độ căng dây đai ..................................................... 107
Hình 5. 6: Kiểm tra và điều chỉnh độ rơ của moayơ bánh xe trước.................. 108
Hình 5. 7: Vị trí đèn EPS trên đồng hồ taplo .................................................... 109
Hình 5. 8: Kiểm tra trục tay lái cong................................................................. 110
Hình 5. 9: Kiểm tra cac chi tiết của dẫn động lái .............................................. 112
Hình 5. 10: Kiểm tra các chi tiết của bơm trợ lực ............................................. 113
Hình 5. 11: Kiểm tra van ổn áp và điều chỉnh lưu lượng.................................. 114
x
Danh Mục Bảng
Bảng 1. 1: Thơng số bố trí bánh xe dẫn hướng ................................................... 26
Bảng 2. 1: Phân loại motor trong hệ thống lái trợ lực thủy lực điều khiển điện tử
............................................................................................................................. 49
Bảng 3. 1: Phân loại cảm biến mô men xoắn ...................................................... 80
xi
Danh mục chữ viết tắt
NVH
Tiếng ồn dao động
DC
Điện một chiều
BLDC
Động cơ điện một chiều không chổi than
VPP
Van phân phối
4WS
Hệ thống lái 4 bánh xe
4WAS
Hệ thống lái 4 bánh xe chủ đông
xii
Chương 2:Hệ Thống Lái Trợ Lực Thủy Lực Điều Khiển Điện Tử
Chương 1: TỔNG QUAN HỆ THỐNG LÁI ĐIỀU KHIỂN ĐIỆN TỬ
Mục tiêu: Học xong chương này, người học có khả năng:
Trình bày được nhiệm vụ và phân loại của hệ thống lái điện tử;
Trình bày được cấu tạo của hệ thống lái điều khiển điện tử;
Phân tích được nguyên lý hoạt động của hệ thống lái điện tử;
1.1. Nhiệm vụ
1.1.1. Công dụng
Hệ thống lái giữ vai trị điều khiển hướng chuyển động của ơ tơ (thay đồi hay
duy trì) theo tác động của người lái. Hệ thống lái tham gia cùng với các hệ thống
điều khiển khác thực hiện điều khiển ơ tơ và đóng góp vai trị quan trọng trong
việc đảm bảo an tồn giao thông khi ô tô chuyển động. Hệ thống lái bao gồm các
cụm và chi tiết từ cơ cấu điều khiển (vành lái) tới các cơ cấu điều khiền hướng
chuyển động tồn xe.
1.1.2. Các phương pháp quay vịng của ơ tơ
Các phương pháp quay vịng thường được sử dụng trên ô tô được thê hiện
trên hình bao gồm:
- Bằng cách quay bánh xe dẫn hướng
- Thay đồi hướng của một phần trục dọc thân xe
Ngoài các phương pháp kể trên, các phương tiện cơ động khác có thể sử dụng
một số các phương pháp quay vòng khác nhau như: thay đổi hướng của toàn bộ
cầu xe, thay đổi vận tốc dài của hai bên bánh xe...
Phương pháp thay đổi hướng chuyển động bằng cách quay bánh xe dẫn
hướng xung quanh trụ quay o (trụ đứng) được sử dụng với ô tô là phổ biến. Với
các loại ô tô, tùy theo số lượng cầu xe, khi quay vòng sẽ tạo nên tâm quay vịng lí
thuyết P khác nhau. Vị trí tâm quay vịng lí thuyết P cho các kết cấu được mơ tả
trên hình vẽ.
Giáo trình Hệ thống lái điều khiển điện tử
Trang 13
Chương 2:Hệ Thống Lái Trợ Lực Thủy Lực Điều Khiển Điện Tử
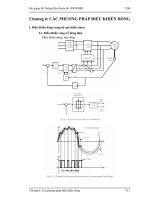
a) Ơ tơ 2 cầu, hai bánh trước dẫn hướng
b) Ơ tơ 3 cầu, hai bánh trước dẫn hướng
c) Ô tô 4 cầu, bốn bánh trước dẫn hướng
d) Ô tơ 2 cầu, bốn bánh trước dẫn hướng
e) Ơ tơ 2 cầu, với kiểu “ bẻ gãy thân xe”
P: Ô tơ 3 cầu, hai bánh trước dẫn hướng
Hình 1. 1: Một số dạng kết cấu thay đổi hướng chuyển động của ô tô
1.1.3. Nguyên lý điều khiển hướng chuyển động của ơ tơ thơng dụng
Mơ tả phương pháp quay vịng trên ô tô thông dụng, sử dụng phương pháp
quay các bánh xe cầu trước xung quanh trụ đứng o để quay vịng ơ tơ trình bày
trên hình 1.1. Tại một thời điểm nhất định, sự quay vòng cơ bản cần được thực
hiện sao cho: véc tơ vận tốc dài của các bánh xe lăn trên nền có cùng tâm quay P.
Đơn giản hơn cả là tâm quay P nằm trên đường kéo dài của trục ngang cầu sau và
các bánh xe cầu trước được điều khiển bởi vành lái quay với các góc khác nhau
xung quanh tâm quay P.
Trong thực tế, bánh xe được điều khiển từ vành lái và quay xung quanh tâm
của trụ đứng (điểm O). Quan hệ giữa các góc quay bánh xe dẫn hướng được thiết
lập quanh điểm o nhằm thỏa mãn sự hình thành tâm quay tức thời p của ô tô. Thực
hiện điều kiện này giúp cho các bánh xe lăn không bị trượt bên, tức là thực hiện
điều khiển hướng chuyển động của ô tô theo ý muốn của người lái.
Giáo trình Hệ thống lái điều khiển điện tử
Trang 14
Chương 2:Hệ Thống Lái Trợ Lực Thủy Lực Điều Khiển Điện Tử
P: Tâm quay vịng ơ tơ v: Chiều chuyển động ô tô
O: Tâm trụ đứng bánh xe dẫn hướng
: Vận tốc góc quay thân xe
V1n, V1t: Vận tốc dài các bánh xe trước V2n, V2t: Vận tốc dài các bánh xe sau
Hình 1. 2: Nguyên lý cơ sở của sự quay vịng ơ tơ
Cần chú ý rằng: các bánh xe dẫn hướng và các bánh xe không dẫn hướng
đều tham gia vào quá trình điều khiển hướng chuyển động của ơ tơ. Q trình điều
khiển này chỉ có hiệu quả khi bánh xe lăn và tiếp xúc với mặt đường. Khi bánh xe
dẫn hướng bị nhấc khỏi mặt đường, ơ tơ có thể mất khả năng chuyển hướng.
Trên hình 1.1 chỉ ra cách xác định tâm quay vòng cơ bản của các phương
pháp điều khiển quay vịng với ơ tô 2, 3, 4 cầu thông dụng.
1.1.4. Các yêu cầu của kết cấu hệ thống lái ô tô
Yêu cầu đối với hệ thống lái như sau:
- Hệ thông lái phải đảm bảo điều khiển hướng linh hoạt và an toàn của ô tô
trên các loại đường khác nhau tùy thuộc vào vận tốc chuyển động. Sự điều khiển
linh hoạt và an toàn phụ thuộc vào các yếu tố kết cấu: khả năng quay vịng lớn
nhất trong khơng gian hạn chế, độ rơ vành lái, tỉ số truyền của hệ thống lái, khả
năng tự ổn định chuyển động của ô tô. Xuất phát từ yêu cầu này, có các yêu cầu
cụ thể sau:
Giáo trình Hệ thống lái điều khiển điện tử
Trang 15
Chương 2:Hệ Thống Lái Trợ Lực Thủy Lực Điều Khiển Điện Tử
+ Góc quay vành lái tơi đa của người lái khơng vượt q 5 vịng quay vành
lái. Ở vị trí biên, cân có cơ câu hạn chê góc quay các bánh xe dẫn hướng, đảm bảo
bán kính quay vịng theo khả năng cơ động cho phép của xe,
+ Lực trên vành lái phù hợp với khả năng điểu khiển của người sử dụng,
+ Độ rơ vành lái không quá lớn: Với xe có vận tốc tối đa lớn hơn 100 km/h,
độ rơ vành lái không vượt quá 15°, với xe có vận tốc từ 25÷100 km/h, độ rơ vành
lái không vượt quá 27°. Hệ thống lái phải đảm bảo có khả năng giảm các lực va
đập từ mặt đường truyền lèn vành lái,
+ Phải có khả năng ơn định hướng chuyển động, đặc biệt khi đi thẳng,
+ Hạn chê tôi đa ảnh hưởng của hệ thông treo với hệ thống lái, nhằm đảm
bảo khả năng điều khiên hướng của ô tô khi hoạt động trên đường xấu.
1.2. Phân loại
a) Theo đặc điểm truyền lực:
- Hệ thống lái cơ khí (khơng trợ lực).
- Hệ thống lái có trợ lực.
b) Theo kết cấu của cơ cấu lái gồm có:
- Loại trục vít - bánh vít.
- Loại bánh răng - thanh răng.
- Loại trục vít - vành răng.
- Loại trục vít - con lăn.
c) Phân loại theo cơ cấu trợ lực lái bao gồm
- Loại trợ lực thủy lực
- Loại trợ lực thủy lực điều khiển điện tử
- Loại trợ lực điện điều khiển điện tử
- Hệ thống lái không trục lái
1.3. Cấu tạo và nguyên lý làm việc hệ thống lái
1.3.1. Cấu tạo cơ bản của hệ thống lái
Cấu tạo cơ bản của hệ thống lái bao gồm các phần chính: vành lái, cơ cấu
lái, dẫn động lái, được thể hiện trên hình 1.3. Cơ cấu lái 3 là một hộp giảm tốc
Giáo trình Hệ thống lái điều khiển điện tử
Trang 16
Chương 2:Hệ Thống Lái Trợ Lực Thủy Lực Điều Khiển Điện Tử
được bố trí trên khung hoặc vỏ của ơ tô đảm nhận phần lớn tỉ số truyền của hệ
thống lái,
Vành lái 1 là cơ cấu điều khiển nằm trên buồng lái, chịu tác động trực tiếp
của người điều khiển. Nối liên giữa vành lái và cơ cấu lái là trục lái 2 với các cấu
trúc đa dạng (trục gãy, trục mềm, trục liền...),
Đần động lái được tập hợp bởi các kết cấu dẫn động nối từ cơ cấu lái tới các
bánh xe dẫn hướng và các liên kết giữa các bánh xe dẫn hướng. Trên hình vẽ, các
chi tiết thuộc về dẫn động lái bao gồm: đòn quay đứng 4, đòn kéo dọc 5, đòn quay
ngang 6, trụ xoay đứng 7, hai đòn bên 8, đòn ngang 9, trục quay bánh xe 11.
1.Vành lái
2.Trục lái
3.Cơ cấu lái
4.Đòn quay đứng
5. Đòn kéo dọc
6.Đòn quay ngang
7.Trụ xoay đứng
8.Đòn bẽn
9. Đòn ngang
10. Dầm cầu
11. Trục quay bánh xe
12. Bánh xe
Hình 1. 3: Cấu tạo hệ thống lái
Trong hệ thống lái ô tô tải (a) các kết cấu: hai đòn bên 8, đòn ngang 9, dầm
cầu 10 tạo nên "hình thang lái" và đảm bảo truyền chuyển động quay của các bánh
xe dẫn hướng trên cùng một cầu. Kích thước của hình thang lái quyết định quan
hệ góc quay của bánh xe dẫn hướng phía trong và phía ngồi.
Trên ơ tơ con có hệ thống treo độc lập (b), cấu trúc hình thang lái được biến
dạng phù hợp với hệ thống treo cơ bản.
1.3.2. Nguyên lý làm việc
Giáo trình Hệ thống lái điều khiển điện tử
Trang 17
Chương 2:Hệ Thống Lái Trợ Lực Thủy Lực Điều Khiển Điện Tử
Khi xe đi thẳng, vành lái nằm ổn định ở vị trí trung gian, các cơ cấu được bố
trí để các bánh xe dẫn hướng nằm ở vị trí đi thắng theo phương chuyên động của
ô tô.
Khi ta quay vành lái 1 sang phải: thông qua trục lái và cơ cấu lái, đầu đòn
quay đứng 4 dịch chuyển về phía sau, qua địn kéo dọc 5 làm quay địn quay ngang
6 và ngõng trục 11, kéo bánh xe dẫn hướng bên trái quay sang phải. Đồng thời
dưới tác dụng của hình thang lái làm bánh xe bên phải cũng quay theo. Ơ tơ quay
vịng sang phải.
Khi ta quay vành lái 1 sang trái: thông qua trục lái và cơ cấu lái, đầu địn
quay đứng 4 dịch chuyền về phía trước, tương tự như trên, các bánh xe dẫn hướng
quay sang trái. Ị tơ quay vịng sang trái.
Đối với ơ tô con sử dụng cơ cấu lái bánh răng thanh ràng (hình 15.3b), cơ
cấu lái 3 tác động lên.
1.3.3. Tỉ số truyền của hệ thống lái
Tỉ số truyền của hệ thống lái liên quan tới việc giảm nhẹ lực trên vành lái và
tổng góc quay vành lái lớn nhất. Trên một ô tô, nếu tỉ số truyền của hệ thống lái
càng lớn thì lực vành lái sẽ nhỏ, nhưng tổng góc quay vịng lớn, và ngược lại.
Tỉ số truyền của hệ thống lái có thể chia ra: tỉ số truyền động học (theo góc
quay) và tỉ số truyền động lực học (theo quan hệ lực). Nhìn chung giá trị tỉ số
truyền của chúng không sai khác nhau nhiều, nên tỉ số truyền của hệ thống lái ihtl
có thể được tính:
ihtl
d
d
(1. 1)
Trong đó: , là góc phần tử tương ứng của vành lái và của bánh xe dẫn
hướng.
Tỉ số truyền ihtl bao gồm: tỉ số truyền của cơ cấu lái (iccl) và tỉ số truyền dẫn
động lái (idđl), trong đó idđl thường xấp xỉ bằng 1, cịn iccl đáp ứng tồn bộ tỉ số
truyền của ihtl:
ihtl iccl .idđl
(1. 2)
Đối với ơ tơ con iccl= 12 ÷20. Đối với ơ tơ tải và ơ tơ bt iccl= 15 ÷ 40.
Giáo trình Hệ thống lái điều khiển điện tử
Trang 18
Chương 2:Hệ Thống Lái Trợ Lực Thủy Lực Điều Khiển Điện Tử
Tổng góc quay bánh xe dẫn hướng lớn nhất về hai phía thường bằng:
(56÷70)0. Tổng góc quay vành lái lởn nhất tương ứng bằng 3-5 vịng quay (1080°÷
1500°).
1.3.4. Tác dụng của các góc kết cấu
Ngồi chức năng đỡ tồn bộ tải trọng ô tô và tạo nên chuyển động thân xe,
bánh xe dẫn hướng còn đảm nhận nhiệm vụ dẫn hướng, do vậy các bánh xe cần
được bố trí với các góc kết cấu nhằm giải quyết nhiệm vụ:
Đảm bảo điều kiện truyền lực tốt nhất giữa bánh xe với mặt đường,
Đảm bảo ổn định chuyển động cho ô tơ khi đi thẳng cũng như khi quay vịng.
1.3.5. Các góc đặt bánh xe
Trong thực tế khi xe đứng yên chưa chịu tải, bánh xe dân hướng được bồ trí
với các góc đặt bánh xe gơm: góc nghiêng trên mặt phăng ngang và góc nghiêng
trên mật phăng dọc (độ chụm).
Các góc này được bơ trí nhăm mục đích: bánh xe dẫn hướng có khả năng
thường xun lăn vng góc và tiếp nhận tốt nhất các phản lực từ mặt đường.
1.3.5.1. Góc nghiêng ngang bành xe dẫn hướng (Camber)
Góc nghiêng ngang của bánh xe dẫn hướng là góc đặt nghiêng bánh xe đo
trên mặt phẳng ngang giữa mặt phăng làn bánh xe so với mặt phẳng đối xứng dọc
của xe. Nhìn từ phía trước lại, góc nghiêng này được thể hiện trên hình 1.4.
Giáo trình Hệ thống lái điều khiển điện tử
Trang 19
Chương 2:Hệ Thống Lái Trợ Lực Thủy Lực Điều Khiển Điện Tử
Hình 1. 4: Định nghĩa góc nghiêng ngang của bánh xe dần hướng
Trên đa số ô tô ngày nay bố trí cấu trúc góc nghiêng ra ngồi (góc nghiêng
ngang dương), trên các ơ tơ đua tốc độ cao có thể gặp góc nghiêng vào trong (góc
nghiêng ngang âm).
Bố trí bánh xe dẫn hướng với góc nghiêng ngang dương có tác dụng:
- Khi bánh xe chịu tải, khắc phục các khe hở trong kết cấu, góc nghiêng
ngang giảm nhỏ, đảm bảo đa số thời gian bánh xe lăn phẳng giúp bánh xe có khả
năng tiếp nhận phản lực tốt hơn và tạo sự mài mòn đều bề mặt lăn của lốp.
- Phản lực từ mặt đường tác dụng lên bánh xe có xu hướng đẩy bánh xe vào
trong, khắc phục độ rơ ổ bi moay ơ bánh xe,
- Giảm cánh tay địn “c”, tức là giảm nhỏ mơ men cản quay vịng, đồng thời
giảm lực trên vành lái.
Bố trí bánh xe dẫn hướng với góc nghiêng ngang âm giảm khả năng trượt
ngang của bánh xe ngoài dưới tác dụng của lực ly tâm khi chuyên động với vận
tốc cao.
1.3.5.2. Góc nghiêng dọc bánh xe dần hướng (độ chụm - toe in, toe out)
Góc nghiêng dọc của bánh xe dẫn hướng là góc đặt nghiêng bánh xe đo trên
mặt phẳng song song với nền đường giữa mặt phăng lăn bánh xe với mặt phăng
Giáo trình Hệ thống lái điều khiển điện tử
Trang 20
Chương 2:Hệ Thống Lái Trợ Lực Thủy Lực Điều Khiển Điện Tử
đối xứng dọc của xe. Nhìn từ phía trên xuống, góc nghiêng này được thể hiện trên
hình 1.5. Góc nghiêng dọc được xác định khi không tải trên nền phẳng thông qua
độ chụm (V = b - a).
Khi bánh xe dẫn hướng bố trí chụm lại ở phía trước thì gọi là độ chụm dương.
Bố trí ngược lại được gọi là độ chụm âm.
Trên các cầu dẫn hướng thường bố trí độ chụm dương. Trong trường hợp đó,
dưới tác dụng của lực cản mặt đường bánh xe (hướng ngược với chiều chuyển
động) có xu hướng ép các bánh xe dẫn hướng xung quanh trụ đứng với cánh tay
đòn “c” tạo nên mô men quay bánh xe. Mô men này làm quay bánh xe về vị trí có
độ chụm bằng 0 (tức là tạo khả năng lăn phẳng bánh xe).
a) Độ chụm dương b > a
b) Độ chụm âm b < a
Hình 1. 5: Định nghĩa độ chụm của bánh xe dẫn hướng
Trên một số cầu chủ động, bánh xe dẫn hướng thường xuyên chịu lực kéo
(hướng cùng với chiều chuyển động). Mơ men quay bánh xe có xu hướng làm
quay bánh xe về vị trí bánh xe lăn phẳng. Như vậy, bánh xe dẫn hướng được bố
trí với độ chụm âm.
Độ chụm của bánh xe dẫn hướng được kiểm tra định kỳ khi xe không tải với
các giá trị thường gặp như sau:
V = (2÷4) mm đối với ơ tơ con,
V = (5÷10) mm đối với ơ tơ tải và ô tô buýt lớn.
Nếu độ chụm trước quá lớn hoặc quá nhỏ so với thiết kế ban đầu, có thể gây
ra hiện tượng mịn lốp khơng đều trên bề mặt lăn, lực vành lái lớn.
Giáo trình Hệ thống lái điều khiển điện tử
Trang 21
Chương 2:Hệ Thống Lái Trợ Lực Thủy Lực Điều Khiển Điện Tử
1.3.5.3. Các góc đặt trụ đứng của bánh xe dẫn hướng
Sự ổn định của bánh xe dân hướng được đảm bảo nhờ góc nghiêng ngang và
góc nghiêng dọc của trụ đứng trong mặt phẳng ngang và mặt phẳng dọc.
a) Góc nghiêng ngang trụ đứng (Kingpin)
Định nghĩa về góc nghiêng ngang trụ đứng của bánh xe dẫn hướng được mô
tả trên hình 1.6 . Góc nghiêng ngang trụ đứng là góc kết cấu đặt nghiêng trụ đứng,
được đo trên mặt phẳng ngang giữa đường tâm trụ đứng với mặt phăng đối xứng
dọc của xe. Góc nghiêng ngang trụ đứng thường nghiêng phía trên vào trong.
Khi quay vịng, bảnh xe dẫn hướng quay xung quanh trụ đứng. Tại mặt
đường, các phản lực dọc của bánh xe đặt cách đường tâm kéo dài của trụ đứng
với cánh tay đòn “c” gây nên mô men quay với trụ đứng. Mô men này được gọi
là "mô men ổn định bánh xe dẫn hướng". Mô men này xuất hiện khi bánh xe
rời khỏi vị trí trung gian.
Hình 1. 6: Định nghĩa góc nghiêng ngang của trụ đứng
Khi người lái quay vành lái, bánh xe dẫn hướng quay xung quanh trụ đứng
và rời khỏi vị trí trung gian. Nêu nên đường biên dạng, bánh xe phải đào sâu xuống
phía dưới mặt đường và tạo nên phản lực đẩy bánh xe quay trở về vị trí xe đi
thẳng. Nếu mặt đường cứng tuyệt đối, thân xe bị nâng lên, thế năng của thân xe
Giáo trình Hệ thống lái điều khiển điện tử
Trang 22
Chương 2:Hệ Thống Lái Trợ Lực Thủy Lực Điều Khiển Điện Tử
tăng, bánh xe bị đẩy về vị trí trung gian do hệ thống có xu thế trở về vị trí có thế
năng thấp nhất.
Điều đó cịn có thể lý giải thông qua việc xuất hiện thành phần phản lực tạo
nên mơ men quay đẩy bánh xe về vị trí trung gian với cánh tay đòn "c". Với cấu
trúc như vậy, người lái muốn quay vịng ơ tơ cần thắng được mơ men ổn định này.
Do vậy cánh tay địn "c" kết hợp với giá trị góc nghiêng .ngang trụ đứng được bố
trí hợp lý nhàm mục đích đảm bảo ổn định chuyển động của bánh xe dẫn hướng
và tạo nên mơ men cản quay vịng tối ưu.
Kết cấu góc nghiêng ngang trụ đứng đối với dầm cầu liền thể hiện trên hình
1.7a, đối với hệ treo độc lập hai địn ngang - trên hình 1.7b.
a)Với dầm cầu liền
b) với hệ thống treo độc lập
Hình 1. 7: Kết cấu góc nghiêng ngang trụ đứng trên ô tô
Trong kết cấu của hệ treo độc lập khoảng cách ”c" có thể dương, bằng 0 hay
âm.
Khi "c" âm, mô men ổn định đồi chiều, tuy nhiên hiệu quả ổn định không
thay đổi. Trong trường hợp "c" âm, bánh xe dẫn hướng chủ động bố trí độ chụm
bánh xe dương.
1.3.5.4. Góc nghiêng dọc trụ đứng (Caster)
Trụ đứng cịn được bố trí nghiêng theo mặt phẳng dọc của xe với góc nghiêng
dọc trụ đứng. Góc nghiêng dọc đó được thể hiện trên hình 5.8.
Giáo trình Hệ thống lái điều khiển điện tử
Trang 23