nghiên cứu tổng quan của cơ cấu quay của cần trục từ đó đi xây dựng chương trình tính toán của phụ tải động cầu của cần trục khi quay trên mặt phẳng nằm ngang, tải trọng lệch khỏi phương thẳng đứng của cơ cấu quay
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (242.07 KB, 24 trang )
Thiết Kế Môn Học : Trang bị điện
Lời nói đầu
Ngày nay cïng víi sù ph¸t triĨn cđa khoa häc kü thuật hiện đại và
công nghệ thông tin thì lĩnh vực tự động hoá và điện khí hoá xí nghiệp đang đợc đa vào ứng dụng rộng rÃi và đợc u tiên, tuy nhiên để đáp ứng đợc nhu cầu
của xu thế và thời đại thì lĩnh vực này đòi hỏi phải có sự cố gắng nỗ lực rất cao
nhất là phải có những sáng tạo mới trong điều khiển và lập trình cũng nh việc
nâng cao công suất, tiết kiệm năng lợng và khai thác tối u những trang thiết bị
điện và điều khiển tự động đà có phù hợp với từng hoàn cảnh của từng nghành,
từng nghề, từng quốc gia. Vì thế trang bị điện là một môn học có thể giúp cho
sinh viên tiếp cận một cách thực tế hơn vơí hệ thống điều khiển tự động ngày
nay trong các nhà máy, xí nghiệp, cầu cảng. Và một trong số những ứng dụng
của trang bị điện là việc nghiên cứu tổng quan của cơ cấu quay của cần trục từ
đó đi xây dựng chơng trình tính toán của phụ tải động cầu của cần trục khi quay
trên mặt phẳng nằm ngang, tải trọng lệch khỏi phơng thẳng đứng của cơ cấu
quay.
Hy vọng với sự giúp đỡ của thầy giáo chủ nhiệm môn trang bị điện
cùng với sự góp ý nhiệt tình của các bạn sinh viên trong ngành thì đề tài này sẽ
đạt đợc một kết quả tốt ®Đp nhÊt khi hoµn thµnh vµ em hy väng nã sẽ là một tài
liệu quan trọng và cần thiết cho các bạn sinh viên cùng nghành cũng nh ai
muốn tìm hiểu sâu hơn về cấu tạo của cần cẩu.
Cuối cùng em xin chân thành cảm ơn !
Sinh Viên
Hoàng thanh tùng
Sinh viên : Hoàng Thanh Tùng
Lớp : ĐTĐ43 - ĐH
1
Thiết Kế Môn Học : Trang bị điện
Chơng 1 :
tổng quan về cơ cấu quay của cần trục
Sự phát triển kinh tế của mỗi nớc phụ thuộc nhiều vào mức độ cơ giới
hoá và tự động hoá các quá trình sản xuất công nghiệp. Trong quá trình sản
xuất máy nâng vận chuyển nói chung, cần trục cầu trục cảng nói riêng là
cầu nối giữa các hạng mục sản xuất riêng biệt giữa các phân xởng trong nhà
máy, giữa các máy công tác trong quá trình sản xuất v.v..
Các cảng biển ở việt nam và các cảng biển trên thế giới, cần trục có
một vị trí hết sức quan trọng trong công nghiệp bốc xếp hàng hoá, là nhóm
thiết bị chủ lực trong việc nâng vận chuyển và lu thông hàng hoá xuất nhập
khẩu của cảng biển, nó đảm nhiệm nhiệm vụ bốc xếp hàng hoá từ dới tàu thuỷ
lên các kho bÃi ở các cảng biển và bốc xếp hàng hoá theo chiều ngợc lại cho
tàu thuỷ vận chuyển bằng đờng thuỷ v.v..
Các cảng biển ở nớc ta đang đòi hỏi ngày càng mở rộng và phát triển
năng lực bốc xếp các cảng ngày một tăng để đáp ứng yêu cầu hàng hoá xuất
nhập khẩu của các nghành kinh tế . Trong điều kiện nhóm thiết bị bốc xếp chủ
yếu đợc nhập ngoại chủng loại rất đa dạng, mức độ tự động hoá ngày càng
cao.
Để thực hiện các thao tác di chuyển trong việc nâng hạ hàng và vận
chuyển hàng hoá từ nơi này đến nơi khác cần trục cần phải có các cơ cấu di
chuyển khác nhau nh bao gồm các cơ cấu : Nâng hàng, hạ hàng, cơ cấu quay,
cơ cấu thay đổi tầm với.
Cơ cấu quay của họ cần cẩu chân đế thờng đợc truyền động bằng hai
động cơ không đồng bộ xoay chiều ba pha ®Ỉt ®èi xøng nhau qua trơc quay.
ViƯc ®iỊu chØnh tèc độ thờng đợc điều chỉnh bằng cách thay đổi điện trở phụ
trong mạch rotor của động cơ (đối với động cơ không đồng bộ rôtor dây quấn )
Sinh viên : Hoàng Thanh Tùng
Lớp : ĐTĐ43 - ĐH
2
Thiết Kế Môn Học : Trang bị điện
và hệ điều khiển TĐĐ đợc thiết kế theo nguyên tắc mạch hở, không có sự
phản hồi của đáp ứng điều khiển do vËy chÊt lỵng hƯ thèng cha cao.
HiƯn nay, mét sè serial họ cần cẩu chân đế thế hệ mới sử dụng kỹ thuật
hiện đại dùng biến tần để cấp cho động cơ không đồng bộ roto lồng sóc đÃ
đem lại chất lợng điều khiển rất cao thể hiện bằng dải ®iỊu chØnh tèc ®é réng,
hƯ thèng gän nhĐ, song gi¸ thành lại rất cao.
Ta cũng có thể xây dựng hệ thống chất lợng điều khiển cao với việc sử
dụng kết hợp điều khiển động cơ không đồng bộ rôto dây quấn và máy phát có
mạch vòng điều chỉnh tốc độ. Cách điều chỉnh này giúp ta điều chỉnh sâu tốc
độ hệ thống, tốc độ có thể đạt tới ( 10, 15, 20 ữ 30)%nđm. ứng với tốc độ quay
này sẽ tạo ra sự dịch chuyển rất chậm của cơ cấu quay sẽ giảm đợc rất lớn sự
rung lắc của hàng ®ång thêi cã thĨ dõng chÝnh x¸c, thêng øng dơng cho cần
cẩu trong công nghệ lắp máy, công nghệ xây dựng và một số lĩnh vực đặc biệt
khác.
1.1 TNH TOAN CƠ CẤU QUAY CỦA CẦN TRỤC :
Thông số đặc trưng của cơ cấu quay là mômen cản khi quay Mbq
(Kgm) , tốc độ góc nq (vg/ph) , ngoài ra còn các thông số khác của bộ
truyền cơ khí , thông số của động cơ điện …
Công suất của động cơ điện truyền động cho cơ cấu quay được xác
định như sau :
PD/C =
Trong đó :
ηM
M bp n bp
975η M
( kw),
- là hiệu suất truyền của bộ truyền cơ khí nối từ động cơ
điện đến cơ cấu quay , khi tốc độ động cơ điện làm việc với tốc độ nD/C
(vg/ph) .
Sinh viên : Hoàng Thanh Tùng
Lớp : ĐTĐ43 - ĐH
3
Thiết Kế Môn Học : Trang bị điện
Tổ soỏ truyen của bộ truyền cơ khí của cơ cấu quay được xác định
như sau :
bp
iM =
nD / C
n bp
Tốc độ quay của cơ cấu quay thường không lớn ( 0,25 – 2 vg/ph) .
Vì vậy tỉ số truyền thường rất lớn , do vậy khi tính toán hiệu suất của cơ
cấu truyền .
Khác với cơ cấu và cơ cấu di chuyển , thời gian làm việc của một
chu kỳ lớn hơn rất nhiều so với thời gian khởi động và thời gian hãm của
hệ thống , còn lực quán tính nhỏ so với lực cản tónh , ở cơ cấu quay lực
quán tính lớn hơn đáng kể so với lực cản tónh . Góc quay làm việc trong
giới hạn ( 90 – 1100) với khối lượng của cơ cấu quay rất lớn vì vậy thời
gian khởi động và hãm tương đương với thời gian làm việc .
Vì vậy việc tính toán mômen của cơ cấu quay bao gồm mômen cản
tónh và mômen quán tính của hệ thống .
Mbp = Mc + Mqt = MKC + Mms + Mg + Mqt .
Trong đó : MKC – là mômen trọng lượng của cần trục G và tải trọng Q + q
khi công tác trên góc nghiêng α ;
Mms – là mômen của lực ma sát ;
Mg – là mômen gây ra do tác động của gió ;
Mqt – là mômen do lực quán tính .
Các thành phần của trọng lực cần trục và của tải thường thay đổi
lớn không chỉ phụ thuộc vào góc nghiêng α mà còn phụ thuộc vào vị trí
Sinh viên : Hoàng Thanh Tùng
Lớp : ĐTĐ43 - ĐH
4
Thiết Kế Môn Học : Trang bị điện
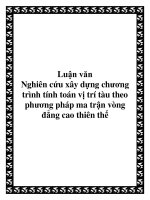
troùng lửụùng taõm của phần quay chân đế của nó . Hệ thống được minh hoạ
trên hình 1.1 a.
P
α
r(1-cosβ )
rcosβ
r0
P
β
sự phân bố trọng tâm khi cần trục quay trên một góc nghiêng.
Trên đường tròn được vạch ra bởi tâm cần trục khi quay trên mặt
phẳng nghiêng (hình 1.1 b).
y
y = r (1-cos β)sin
0
'= arctg.sin*sin
P'
0
X=r
2
P P''
3
2
x
0
Sinh viên : Hoàng Thanh Tùng
Lớp : §T§43 - §H
5
Thiết Kế Môn Học : Trang bị điện
Toaù ủoọ cuỷa điểm bất kỳ của trọng tâm được viết như sau :
y = r0 (1 – cosβ) sinα ,
hay khi thay β bằng x/r0 ta có :
y = r0 sinα – ro sinα cos (x/r0) .
Đạo hàm của đại lượng này được xác định theo góc tiếp tuyến với
đường cong α’ :
dy
= sin αsin β = tgα'
dx
Do đó chúng ta thiết lập được :
P’ = P sin arctg (sinαsinβ)
Bởi ở góc nhỏ sin = tg thì :
P’ = P . sinα . sinβ
Thì mômen của trọng lượng cần và tải trọng được viết :
MKC = [Gr0 + (Q + q)R] sinα . sinβ
Với r0 và R là khoảng cách từ trục của cơ cấu quay đến trọng tâm
cần trục và của tải trọng .
Giá trị lớn nhất của biểu thức đạt được khi β = 900 và β = 2700 nghóa
là khi sinβ = 1 . Cuối cùng ta có :
Max
MKC = [ Gr0 + ( Q + q ) ] R sin α
Mômen ma sát phụ thuộc vào áp lực trên ổ đỡ phụ thuộc vào kết
cấu của cần cẩu vì vậy mômen ma sát có thể được viết :
Mms = Ai i ri
Sinh viên : Hoàng Thanh Tùng
Lớp : §T§43 - §H
6
Thiết Kế Môn Học : Trang bị điện
Trong ủoự : Ai , μi , ri - là áp lực trên ổ đỡ , hệ số ma sát , bán kính
ma sát của ổ đỡ .
Mô tả phụ tải gió tác động lên cơ cấu quay :
( hình 1.2)
2
PgFisinβ
PgFG
PgFisinβ
β
rg
R
Mômen cản do gió tác động phụ thuộc vào hình dạng của cần và hàng
hoá . Đồng thời mômen cản do gió gây nên cũng thay đổi khi cần trục
quay . Dạng tổng quát mômen gió được viết như sau :
Mg = Pg FG R sinβ + Σ Pg Fi rg sin2β
Giá trị lớn nhất của mômen do gió gây ra khi β = 900
Mg max = Pg FG R + Σ Pg Fi rg
Mômen cản lực quán tính được viết như sau :
M qt = j
d 0,105n
KJ 0
dt
t
Sinh viên : Hoàng Thanh Tïng
Líp : §T§43 - §H
7
Thiết Kế Môn Học : Trang bị điện
Trong ủoự : Σ J0 – tổng mômen quán tính của cần trục và tải trọng
quy về trục quay
K – là gia tốc góc (theo bảng tra cứu)
Tốc độ quay của phần quay cần trục , cũng như thời gian quá độ
trong chu kì làm việc : gia tốc hoặc hãm đều gây ra các ảnh hưởng đáng
kể lên lực quán tính ly tâm hoặc tiếp tuyến tác động lên cần của cần
trục .
Trên hình 1.3 những lực theo phương nằm ngang gây ra sự lệch
đường cáp tới vị trí , ở đó trọng lực và lực quán tính cân bằng với hướng
dọc theo cáp . Sự cân bằng này có trể di chuyển về đầu cần và phân tích
thành hai thành phần : nằm ngang và thẳng đứng .
Khi phân tích lực quán tính cần chú ý đến tất cả các thành phần lực
nằm ngang , được đặt ở móc , cáp và trong tính toán được coi như là được
đặt ở cần .
Khi tính toán tải trọng treo ở đầu cần và phần palăng ở đầu cần
xem như khối lượng trọng điểm , lực quán tính của khối lượng đó được
xác định như sau : H1.3.các lực quán tính ly tâm và tiếp tuyến của các
phần quay của cần trục.
Sinh viªn : Hoàng Thanh Tùng
Lớp : ĐTĐ43 - ĐH
8
Thiết Kế Môn Học : Trang bị điện
2
Q+q
TRục Quay
LdCl
l
X0
C
Gc
lL
hC L
aCK
C
PK
Q+q+Gn/2
PK
hỡnh 1.3a.Biểu đồ phân bố lực ly tâm và tiếp tuyến
GN
2
Q+q
Pqt
Q+q
Q+q+PL
Q+q
hình 1..3b.sự lệch của tải trọng nầng do sự tác động của lực ly tâm
Q +q+
PK
Gn
2
=
Gn
2 2Πn bp ( x + L sin θ)
0
C
g
60t
Q+q+
Trong đó : nbp – là tốc độ góc của các phần quay (vg/ph) ;
T – là thời gian lớn nhất của quá trình quá độ (s) ;
Sinh viên : Hoàng Thanh Tùng
Lớp : ĐTĐ43 - ĐH
9
Thiết Kế Môn Học : Trang bị điện
Lửùc quaựn tớnh tiếp tuyến của khối lượng cần phân bố dọc theo
chiều dài cần vi phân . Lực quán tính của khối lượng dmC :
C
dPK = dm
2Πn bp
60t
( x 0 + l sin θ) = m C
LC
2Πn bp
60t
( x 0 + l sin θ) dl
Lực quán tính tiếp tuyến toàn phần của caàn :
L
2L Π n
n
m C 2Π n bp C
P =
( x 0 + l sin θ )dl = m C C bp x 0 + LC sin θ = 0,0107G C bp x 0 + LC sin θ
L C 60t ∫
LC
60t
2
t
2
0
C
K
Điểm đặt cân bằng các lực tiếp tuyến quán tính so với qốc tựa của cần
được xác định theo phương trình :
dM C =
K
m C 2Πn bp
( x 0 + l sin θ) ldl
L C 60t
Điểm đặt của lực quán tính trên cần được tính :
L
2
3
m C 2Π n bp C
( x 0 + l sin θ )ldl x 0LC + LC sin θ
dMC L C 60t ∫
K
0
3
LC =
=
= 2
=
K
LC
C
L C sin θ
dPK
m C 2Π n bp
∫0 ( x 0 + l sin θ )dl x 0 + 2
L C 60t
=
3x 0 + L2C + 2L3C sin θ L C 3x 0 + 2L C sin θ
=
3 2x 0 LC + L2C sin θ
3 2x 0 + LC sin θ
(
)
Hoành độ của điểm đặt quán tính tiếp tuyến :
aC = l C sin θ
K
K
Lực ly tâm do trọng tải , đồ gá và một nửa trọng lượng palăng đặt ở
đầu cần :
Sinh viên : Hoàng Thanh Tùng
Lớp : ĐTĐ43 - ĐH
10
Thiết Kế Môn Học : Trang bị điện
Q+q+
PL
Gn
2
=
G
Gn
Q+q+ n
2
2 2 ( x + L sin θ) =
0
C
g
g
Q+q+
=
Q+q+
g
2Π n bp
60
2
( x 0 + LC sin θ ) =
Gn
2 n 2 ( x + L sin θ) , ( KG )
0
C
Lực ly tâm PLC do khối lượng cần được đặt ở phần giữa của cần
cách gốc tựa một khoảng l . Giá trị của lực này và tung độ HLC có điểm
đặt có thể xác định theo phương pháp như sau : (theo hình 1.3 a)
Trọng lượng của cần là GC (kg) được phân bố trên toàn bộ độ dài
của cần , trên từng đơn vị độ dài IM kể từ gối tựa sẽ bằng :
dm C =
GC
dl
gLC
Vi phân của lực ly tâm khi tốc độ góc là ω được viết như sau :
(
)
C
dPL = dm Cω2 x 0 + l sin θ =
GC 2
ω ( x 0 + l sin θ) dl
gLC
Lực ly tâm toàn phần :
G
PL = C ω2
gL C
LC
GC 2
L2
x 0 L C + C sin θ
∫ ( x 0 + l sin θ) = gLC ω
2
0
Thay ω = Пn/30 ta coù :
PL =
G CΠ2 n 2
( 2x 0 + LC sin θ) , ( kg)
g.1800
Vì mômen do lực nguyên tố kể từ gối đỡ của cần :
dM L =
GC 2
ω ( x 0 + l sin θ) ldl cos θ
gLC
Neân tung độ điểm đặt của lực ly tâm :
Sinh viªn : Hoàng Thanh Tùng
Lớp : ĐTĐ43 - ĐH
11
Thiết Kế Môn Học : Trang bị điện
L
hC =
L
dM
dP
L
=
GC 2 C
ω ( x 0 + l sin θ ) ldl cos θ
gLC ∫
0
L
GC 2 C
ω ( x 0 + l sin θ ) dl
gLC ∫
0
L
x0 l 2 l 3
+ sin θ
3
= cos θ 2
l2
x0 l + sin θ
2
LC
=
3 x0 + 2 LC sin θ LC
cos θ
2 x0 + LC sin θ 3
0
Khoảng cách kể từ gối đỡ :
hC
L 3x + 2LC sin θ
L
= C 0
cos θ
3 2x 0 + LC sin θ
IC =
L
Khi có các tời quay hay có các thiết bị công suất xác định thường
cần xác định quá trình gia tốc và hãm
Biểu thức tính mômen cản chung nhất của cơ cấu quay trong quá
trình gia tốc được tính như sau :
M bq = M KC + M ms + M g +
0,105n
KΣJ 0
t TT
Từ đó thay MĐ/C vào Mbp ta được :
t TT =
M D/C
0,105nKΣJ 0
( s)
+ M ms + M KC + M g
Trong thời gian hãm mômen được tạo bởi phanh MH :
M H = M KC − M ms + M g +
0,105nKΣJ 0
tH
Từ đó ta được :
tH =
0,105nKΣJ 0
( s)
M H + M ms − M KC − M g
Sinh viªn : Hoàng Thanh Tùng
Lớp : ĐTĐ43 - ĐH
12
Thiết Kế Môn Học : Trang bị điện
Trong cụ caỏu quay phụ tải cơ bản mà động cơ phải khắc phục trong
quá trình khởi động là tải quán tính trong giai đoạn gia tốc ,vì thế thường
chọn loại động cơ công tác ngắn hạn lặp lại có khả năng quá tải tốt . Do
đó khi chọn công suất động cơ thường sử dụng công thức sau :
N dm =
DC
N DC
λ
Với λ là hệ số quá tải cho phép của động cơ trong chế độ khởi động
1.2. ĐỘNG HỌC CỦA CƠ CẤU QUAY:
1.2.1. Phụ tải lệch khỏi phương thẳng đứng khi cần quay theo phương
nằm ngang :
Chúng ta khảo sát trường hợp khi quay tải được treo trên đầu cần
với palăng treo cách trục quay một khoảng R như (hình 1.4).
Nếu gia tốc góc của cần khi quay là ε coi là hằng số (dạng của ε cho
trước) . Thì sau một khoảng thời gian t kể từ lúc bắt đầu chuyển động cáp
nâng sẽ lệch khỏi mặt phẳng của cần với phương thẳng đứng một góc ψ .
Thêm vào đó là lúc tác dụng của trọng lực Q = mGg và lực quán tính Pqt =
mGRε , có thể viết được phương trình vi phân quay tải trọng quanh một
Sinh viên : Hoàng Thanh Tùng
Lớp : ĐTĐ43 - ĐH
13
l
Thiết Kế Môn Học : Trang bị điện
l
Pqt
R
Q = mG.g
mG.g
hình 1.4
Trục đi qua điểm treo trong mặt phẳng cần
d2ψ
J 2 = M1
dt
Với J – mômen quán tính của tải trọng tương ứng với trục quay
J = mGl2
M1 – tổng các mômen của các lực quay quanh trục
M1 = -Qlsinψ + Pqtlcosψ = -mGl(gsinψ – εRcosψ)
Thay giá trị M1 và J vào phương trình chuyển động ta được :
m Gl2
d 2ψ
= m G l( εR cos ψ − g sin ψ )
dt 2
Với độ lệch của góc nhỏ ta có thể coi cosψ = 1 , sinψ = ψ .
d 2ψ g
εR
d 2ψ
+ ψ=
hoặc 2 + β2ψ = q
dt 2
l
l
dt
Giải phương trình trên ta được :
ψ = C1 cos βt + C2 sin t +
q
2
Sinh viên : Hoàng Thanh Tùng
Lớp : §T§43 - §H
14
Thiết Kế Môn Học : Trang bị điện
Vụựi ủieu kieọn ñaàu t = 0 , ψ = 0 , dψ/dt = 0 ta suy ra:
C1 +
q
q
= 0; C1 = − 2
2
β
β
dψ
= −C1βsin βt + C2βcos βt ; C2β = 0 ; C2 = 0
dt
Do đó :
ψ=−
q
q
q
ε
cos βt + 2 = 2 (1 − cos βt ) = R(1 − cos βt )
2
β
β
β
g
Trong đó β là tần số dao động tuần hoàn .
1.2.2. Phụ tải động trong cơ cấu quay :
Các phần tử của cần trục khi quay có thể phân thành hai loại khối
lượng : khối lượng của cần và tải trọng , khối lượng của các phần tử quay
trong cơ cấu dẫn động được biểu diễn trên hình 1.5 .
R
ϕP , JP
ϕK , JK
Ψ
Qtgψ
Q
Khi phân tích đến hệ thống này cần phải kể đến ảnh hưởng lắc của
tải trọng trong mặt phẳng của cần khi quay . Với các phần tử cơ bản
chuyển động quay thì sự tính toán hụùp lyự khoõng phaỷi laứ khoỏi
Sinh viên : Hoàng Thanh Tïng
Líp : §T§43 - §H
15
Thiết Kế Môn Học : Trang bị điện
lửụùng vaứ toỏc độ dài mà là mômen quán tính và các tốc độ góc .
Nếu dịch chuyển về góc các phần tử quay của cơ cấu quay cùng với
mômen quán tính JP và φP còn góc dịch chuyển khối lượng phần quay của
cần trục cùng với mômen quán tính JK là φK thì động năng của các khối
lượng sẽ là :
Kp =
JP
2
2
2
J dϕ
dϕP
; KK = K K
2 đKt
đPt
Thế năng là :
( ϕP − ϕK ) 2 k
ΠP = ΠK =
M
2
Với kM là độ cứng của khâu đàn hồi
Mômen tác động toàn phần sẽ bằng tổng của mômen cản tónh và
mômen dư (mômen động) .
Các phương trình vi phân mô tả chuyển động cưỡng bức của từng
thành phần khối lượng được viết như sau :
JP
d 2ϕ P
+ ( ϕ P − ϕ K ) K M = M C + M du
dt 2
JK
d2ϕ K
+ ( ϕ P − ϕK ) K M = − MC − MG
dt 2
Trong đó MG là mômen của tải trọng Q với bán kính cách tay đòn
là R :
MG = QRtgψ
Khi thay tgψ = ψ (khi ψ = 150 sai số 3%) và góc ψ được thay bằng
công thức của nó ở chương trước ta coự :
Sinh viên : Hoàng Thanh Tùng
Lớp : ĐTĐ43 - §H
16
Thiết Kế Môn Học : Trang bị điện
M G = QRψ =
m G R 2εg
(1 − cos βt ) = m G εR 2 (1 − cos βt ) = A 0 (1 − cos βt )
g
Khi nhân phương trình thứ nhất với JK ,nhân phương trình thứ hai
với JP rồi trừ phương trình thứ hai cho phương trình thứ nhất ta có :
d 2 ϕ P d 2 ϕK J K + J P
J ( M + M du ) + J P ( MC + M G )
−
+
k M ( ϕ P − ϕK ) = K C
2
2
dt
dt
JK J P
JK JP
Đó là phương trình vi phân xác định độ biến dạng của khâu đàn hồi
(φP – φK) hay mômen cản của khâu đàn hồi Mbp .
Ta đặt :
d 2ϕP d 2ϕK d 2ϕ
− 2 = 2
dt 2
dt
dt
φP – φK = φ
J P + JK
= p2
J P JK
M C + M du M C
+
=q
JP
JK
MG m G R2ε
(1 − cos βt ) = A(1 − cos βt )
−
JK
JK
Thì phương trình có thể viết lại dưới dạng sau đây :
d2ϕ
= p2 ϕ = q + A(1 − cos β t ) = q + A − A cos β t = D − A cos βt
dt 2
Nghiệm tổng quát của phương trình đó là :
ϕ = C1 cos pt + C2 sin pt +
D
A
−
cos βt
p 2 p 2 − β2
Caùc hằng số được xác định theo điều kiện đầu .
Sinh viên : Hoàng Thanh Tùng
Lớp : ĐTĐ43 - ĐH
17
Thiết Kế Môn Học : Trang bị điện
Trong thụứi ủieồm đầu của quá trình chuyển dịch các chi tiết trong cơ
cấu được coi đã tiếp xúc với nhau và chịu mômen cản bằng mômen cản
ngoài MC , tốc độ bằng không .
Vì vậy khi t = 0 , φ = MC/kM ; còn dφ/dt = 0 vì thế :
MC
D
A
= C1 + 2 − 2
kM
p
p − β2
Suy ra :
C1 =
MC
A
D
+ 2
− 2 ; C2 = 0
2
kM p − β
p
Do đó :
M
A
D
D
A
ϕ= C + 2
− 2 cos pt + 2 − 2
cos β t
2
k
p
p
p − β2
M p −β
=
MC
Ak
Dk
cos pt + 2 M 2 ( cos pt − cos βt ) + 2M (1 − cos pt )
kM
p −β
p
Trong đó p và β là tần số dao động tuần hoàn của hệ thống .
Mômen tác động lên khâu đàn hồi được tính như sau :
M bp = ϕk M = M C cos pt +
Ak M
( cos pt − cos βt ) + Dk2M (1 − cos pt )
2
2
p −β
p
Khi thay :
A=
MG
M + M du M C
MG
;D = q + A = C
+
+
JK (1 − cos βt )
JP
JK JK (1 − cos βt )
Ta coù :
M bp = MC cos pt +
M G k M ( cos pt − cos β t ) k M (1 − cos pt ) M du MC MC
MG
+
+
+
−
2
2
2
JK (1 − cos β t ) p − β
p
JP
JK JK (1 − cos β t )
JP
(
)
Hay :
Sinh viên : Hoàng Thanh Tùng
Lớp : §T§43 - §H
18
Thiết Kế Môn Học : Trang bị điện
M
M
M k
M k
M bp = M C cos pt + du + C + C M x(1 − cos pt ) + G 2M
JP
JK p2
JK p
JP
1 − cos pt + cos pt − cos βt
1 − cos βt
β2
1 − 2 (1 − cos βt )
p
Nhóm các số hạng và điền các giá trị :
M G = QR 2
ε
(1 − cos βt ) ; k M = k M JP JK = JP JK
g
p2
k M ( J P + JK ) J P + J K
Có thể viết được :
M bp =
1
{M C [( J P + JK ) cos pt + ( J P + JK )(1 − cos pt )] +}
J P + JK
ε
cos pt − cos βt
+ M du J K (1 − cos pt ) + QR 2 J P (1 − cos pt ) +
β2
g
1− 2
p
Cuối cùng ta coù :
M bp = MC +
JK
J
M d ( 1 − cos pt ) + P ×
JP + JK
JK + J P
β2
cos pt − cos β t
2
ε
× QR 2 1 + P
β2
g
1− 2
P
Trong công thức này thành phần thứ nhất xác định ảnh hưởng của
mômen cản tónh trong cơ cấu , thành phần thứ hai xác định ảnh hưởng của
mômen dư (mômen động) , thành phần thứ ba là ảnh hưởng của tải lệch
khỏi phương thẳng đứng . Để hạn chế mômen động cho hệ thống trên trục
truyền động thường lắp đặt thêm bánh đà để hạn chế sự quá tải của động
cơ . Khi cosβ = cos pt = -1 thì ta nhận được :
Sinh viªn : Hoàng Thanh Tùng
Lớp : ĐTĐ43 - ĐH
19
Thiết Kế Môn Học : Trang bị điện
M Max = M C + M du
bp
2 JK
ε 2JP
QR 2
J P + JK
g J P + JK
CHƯƠNG 2 : MÔ HÌNH NHẬN DẠNG MÔMEN CẢN
CƠCẤU QUAY CHO CẦN TRỤC
2.1. Khái quát :
Điều khiển hệ thống truyền động điện tự động sử dụng trong
cần trục hiện nay thường được xây dựng theo nguyên tắc hệ kín . Tốc độ
công nghệ được thiết kế nhằm mục đích thoả mãn bốc xếp nhiều loại
hàng hoá .Điều khiển cơ cấu quay cần trục thuộc dạng hệ thống quán
tính lớn , tốc độ biến đổi chậm . Trước đây vấn đề điều khiển còn nhiều
hạn chế , hệ thống điều khiển thường được thiết kế theo dạng SISO ,
ngày nay kỹ thuật điều khiển với sự trợ giúp của máy tính , các thiết bị
điều khiển khả trình PLC đã được ứng dụng phổ biến . Thiết bị biến đổi
công suất với kỹ thuật điều khiển tiên tiến , mô hình toán động cơ không
đồng bộ được nhận dạng và ứng dụng trong các biến tần điều chế theo độ
rộng sung (PWM) . Hệ thống điều khiển xây dựng là hệ thống nhiều đầu
vào ra .
Việc tổng hợp tín hiệu điều chỉnh tốc độ được thực hiện theo yêu cầu bốc
xếp hàng hoá . Tín hiệu điều khiển mômen cho các hệ thống truyền động
điện tự động trong các hệ thống sử dụng biến tần PWM – động cơ không
đồng bộ , hệ thống sử dụng phụ tải động – động cơ không đồng bộ rôto
dây quấn hoặc động cơ điện một chiều có cuộn nối tiếp kớch tửứ ủoọc laọp
Sinh viên : Hoàng Thanh Tùng
Lớp : §T§43 - §H
20
Thiết Kế Môn Học : Trang bị điện
nhaỏt thieỏt phaỷi tổng hợp tín hiệu điều khiển mômen dựa vào cấu trúc cụ
thể của cần trục .
2.2. Mô hình nhận dạng mômen cản tónh của cơ cấu quay :
Để thuận tiện cho việc nhận dạng đặc tính mômen cản cơ cấu quay ta
tính toán cho họ cần cẩu KONDOR . Cơ cấu quay cần cẩu KONDOR có
một số thông số chính sau : [12]
+ Tầm với và tải trọng :
Rmax = 32 m
Q = 25 taán
R min = 8 m
Q = 32 tấn
+ Tốc độ quay định mức của cơ cấu : 1v/p
+ Trọng lượng cabin , đối trọng , vòi , cần , hàng có thông số lần lượt như
sau :
Gcb = 25 tấn
Gđ = 12,8 tấn
Gv = 6,5 taán
Gc = 18,9 taán
Q = 25 tấn
+ Diện tích cản gió của một số cơ cấu :
Fvn : diện tích cản gió của vật nâng
Fc : diện tích cản gió của cần Fc = 34,65 m
2
Fv : diện tích cản gió của cần Fv = 11,865 m
2
Fcb : diện tích cản gió của cần Fcb = 40,2 m
2
+ Khoảng cách từ trục quay đến trọng tâm của cần , vòi , cabin lan lửụùt laứ
Sinh viên : Hoàng Thanh Tùng
Lớp : ĐTĐ43 - §H
21
Thiết Kế Môn Học : Trang bị điện
a1 = 11,25 m
a2 = 22 m
a3 = 3,17 m
moâmen cản của cơ cấu quay được tính như sau :
M bp = MC +
JK
J
M d ( 1 − cos pt ) + P ×
JP + JK
JK + J P
β2
cos pt − cos β t
2
ε
× QR 2 1 + P
β2
g
1− 2
P
Vì tải của cơ cấu quay phụ thuộc vào tầm với của cần cẩu nên để đơn
giản ta tính cho tầm với lớn nhất R = 25 m
2.2.1. Tính mômen cản động của cơ cấu quay:
Mômen cản tónh của cơ cấu quay được xác định treo công thức sau : [13]
Mct = Mms + Mgió + Mα
+ Tính mômen ma sát trên ổ đóa :
Mms = Σ Ai μi ri = Mổ đỡ + Mtrượt
Trong đó :
Mổ đỡ : mômen ma sát tại ổ đỡ của cần trục gây nên
Mtrượt : mômen ma sát tại ổ trượt gây nên
-
Mômen do ổ trượt gây ra :
Mot =
V.f .dt b
( kgm )
2
Trong đó V : là tải trọng đứng
V = Gd + Gcb +Gc + Gv +Q (kg)
Sinh viªn : Hoàng Thanh Tùng
Lớp : ĐTĐ43 - ĐH
22
Thiết Kế Môn Học : Trang bị điện
Gcb = 25 tấn
Gđ = 12,8 tấn
Gv = 6,5 tấn
Gc = 18,9 tấn
Vậy : V = 63200 + Q (kg)
Laáy f = 0,08 [13]:
D = 800mm
800 + 200
dtb =
= 510 mm
d = 200mm
2
Do đó :
Mot = (63200+Q) . 20,4 = 1289280 +20,4 Q (kgm)
- Moâmen do ổ đỡ gây ra :
M OD =
H.f .d
( kgm )
2
Tải trọng H được tính như sau :
G c .11,25 + ( P3 + W3 ) .9,875 + Q.32 + P1.11,25 + W2 .20
H=
+ G v .22 + P2 .19,625 − G dtr .4.625 − G cb .3,167 − P5 .15,75
( kg)
h
Trong đó :
P3 : thành phần lực ly tâm của cần khi quay
W2 , W3 : trành phần gió tác dụng
P1 : thành phần lực ly tâm của hàng
P3 : thành phần lực ly tâm của vòi
P3 : thành phần lực ly tâm của đối troùng
Sinh viên : Hoàng Thanh Tùng
Lớp : ĐTĐ43 - ĐH
23
Thiết Kế Môn Học : Trang bị điện
P3 =
Vq2
Re
Gc =
1
.18901 = 1698,8( kg)
11,25
We = 274,2 (kg)
W3 = 1043,3 (kg)
Vq2
.Q = 0,4Q( kg )
P1 =
P2 =
1
.6500 = 295,455( kg)
22
P5 =
V
.G dt = 2767,568( kg )
R dt
Re
Thay soá ta có :
H = 27330,05 + 3,8408Q (kg)
+ Xác định mômen do gioù :
Mgioù = q.Fvn.Lsinβ + q(Fca1 + FvQ2 – Fcba2) .sin2β (kg)
Trong đó :
Fvn : diện tích cản gió của vật nặng
Fc : diện tích cản gió của cần = 34,65 m
2
Fvn : diện tích cản gió của vòi = 11,87 m
2
Fvn : diện tích cản gió của cabin = 40,2 m
2
L = 32 m (tầm với max)
a1 = 11,25 m : khoảng cách từ trục quay đến trọng tâm của cần
a2 = 22 m : khoảng cách từ trục quay đến trọng tâm của vòi
a3 = 3,176 m : khoảng cách từ trục quay đến trọng tâm của cabin
q = 15 kg/m : áp lực tính toán
2
Mgió = 480.Fvn.sinβ + 7782,54.sin2 (kg)
Sinh viên : Hoàng Thanh Tùng
Lớp : ĐTĐ43 - §H
24
Thiết Kế Môn Học : Trang bị điện
+ Moõmen caỷn do độ nghiêng của mặt nền
Mα = (Q.L + Gc.a1 +Gv.a2 – Gcb.a3 - Gdt.a4) sinφ.sinβ
Mα = (32.Q + 214662,5) .0,026.sin (kg)
Sinh viên : Hoàng Thanh Tùng
Lớp : ĐTĐ43 - §H
25