Thiết bị phát hiện thăng giáng từ trường nhỏ
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (559.08 KB, 19 trang )
Thiết bị phát hiện thăng giáng từ trường nhỏ
Nguyễn Trọng Luân
Trường Đại học Khoa học Tự nhiên
Luận văn Thạc sĩ ngành: Vật Lí vô tuyến – điện tử; Mã số: 60.44.03
Người hướng dẫn: PSG.TS. Phạm Quốc Triệu
Năm bảo vệ: 2012
Abstract: Nghiên cứu tổng quan về một số nguyên lí chuyển đổi tín hiệu điện – từ và
về một số loại sensor đo từ trường. Nghiên cứu hoạt động, khảo sát các khối chức
năng của thiết bị phát hiện thăng giáng từ trường nhỏ, do trường Đại học Khoa học Tự
nhiên chế tạo. Đồng thời dùng thiết bị này đo đạc, đánh giá sự thăng giáng từ trường
của Trái Đất. Nghiên cứu một số giải pháp làm giảm tạp nhiễu, nâng cao tỷ số S/N.
Trong đó phương pháp xử lý tín hiệu bằng kỹ thuật Sampling and Hold (phương pháp
Boxcar) được làm rõ. Mô phỏng hoạt động của một số khối chức năng trong thiết bị
bằng phần mềm Matlab, Mô phỏng phương pháp Boxcar, đề xuất mạch Boxcar lấy
mẫu tại hai thời điểm (Boxcar hai kênh).
Keywords: Vật lý; Từ trường; Vô tuyến điện tử
Content
MỞ ĐẦU
Từ trường nhỏ là thông số quan trọng trong nghiên cứu Vật lí. Vì vậy việc đo đạc và
phát hiện thăng giáng từ trường nhỏ có ý nghĩa vô cùng to lớn đối với đời sống. Việc phát
hiện thăng giáng này cho phép đánh giá được ảnh hưởng của từ trường vũ trụ, Trái đất tới thời
tiết và sức khỏe con người cũng như có thể giúp phát hiện các dòng điện, vật liệu từ tính cũng
như các mỏ khoáng sản trong lòng đất….
Bản luận văn này khái quát nguyên lí hoạt động, sơ đồ các khối trong thiết bị phát hiện
thăng giáng từ trường nhỏ, đưa ra một số giải pháp để nâng cao tỉ số S/N và tập trung vào tìm
hiểu, mô phỏng “phương pháp nâng cao tỉ số S/N bằng phương pháp Boxcar” dùng phần
mềm Matlab.
Nội dung của bản luận văn nằm trong chương trình nghiên cứu của đề tài trọng điểm
cấp ĐH Quốc Gia Hà Nội mã số QGTĐ.10.27 về nghiên cứu, thiết kế và chế tạo thiết bị phát
hiện thăng giáng từ trường nhỏ.
CHƢƠNG 1 - NGUYÊN LÍ SENSOR PHÁT HIỆN TỪ TRƢỜNG
1.1 Một số nguyên lí vật lí chuyển đổi tín hiệu từ - điện
2
1.1.1 Hiệu ứng Hall
Phát hiện vào năm 1880 bởi Edwin Hall, khi đặt một từ trường vuông góc với hướng
của dòng điện trong kim loại hay chất bán dẫn thì xuất hiện một điện trường vuông góc với cả
hướng của dòng điện và hướng của từ trường. Đây là một trong những hiệu ứng được sử dụng
rộng rãi trong công nghệ sensor.
1.1.2 Hiệu ứng Spin Hall
Hiệu ứng Spin Hall (SHE-Spin Hall Effect) liên quan đến sự phát sinh dòng spin ngang
với điện trường đặt vào vật liệu, dẫn đến sự gia tăng các spin không cân bằng trong hệ. Hiệu
ứng này xuất hiện trong các vật liệu thuận từ là hệ quả của tương tác spin-quỹ đạo. Đó là lý
thuyết được dự đoán vào năm 1971 bởi Yakonov và Perel. Sự phát sinh, lôi kéo và phát hiện
điện tử spin- phân cực trong cấu trúc nano là một trong những thách thức của thuyết spin điện
tử.
Hiệu ứng này có tiềm năng to lớn trong việc sử dụng các cảm biến ứng dụng trong
chuỗi từ nano hoặc film mỏng với chiều dày nano.
1.1.3 Hiệu ứng Faraday – Henry
Định luật Faraday-Henry là định luật cơ bản của điện từ và phát biểu rằng một điện
trường được tạo ra khi thay đổi một từ trường. Michael Faraday và Joseph Henry độc lập
tìm ra hiện tượng điện từ. Các sensor và thiết bị âm thanh thời kỳ đầu (như micro-phones),
đồng hồ đo dòng điện và điện thế tương tự, và rơle lưỡi gà sử dụng hiệu ứng này.
1.1.4 Hiệu ứng Barkhausen
Năm 1919 Barkhausen thấy rằng khi đặt một từ trường liên tục tăng chậm vào vật liệu
sắt từ thì nó sẽ bị từ hóa không liên tục mà theo từng bậc nhỏ. Những thay đổi đột ngột không
liên tục trong sự từ hóa là kết quả của những thay đổi rời rạc cả trong kích cỡ và hướng của
vùng sắt từ (hay cụm vi mô của nam châm nguyên tử sắp hàng) xuất hiện trong quá trình từ
hóa hay khử từ liên tục.
Hiệu ứng này thông thường làm giảm hoạt động của sensor từ nó xuất hiện như nhiễu
bậc trong phép đo. Hiệu ứng này cũng quan sát được ở vật liệu sắt từ kích thước nano.
1.1.5 Hiệu ứng Nernist/Ettinghausen
Nernst và Ettingshausen phát hiện ra một lực điện động được sinh ra dọc chất dẫn
điện hay bán dẫn khi nó chịu tác dụng đồng thời của gradient nhiệt độ và trường từ. Hướng
của lực này vuông góc cả với trường từ và gradient nhiệt độ.
1.1.6 Hiệu ứng từ trở
Hiệu ứng từ trở là hiện tượng phụ thuộc điện trở của vật chất vào từ trường ngoài. Từ
trường ngoài gây ra lực Lorentz tác động vào các hạt tải chuyển động trong vật liệu tùy thuộc
3
hướng của trường mà có thể gây ra cản trở đối với sự dịch chuyển của các hạt tải. Hiệu ứng
này do Lord Kelvin phát hiện vào năm 1856. Hiệu ứng trở nên nổi bật khi tìm ra từ trở không
đẳng hướng (AMR-Anisotropic Magnetoresistance) và từ trở khổng lồ (GMR-Giant
Magnetoresistance ).
1.1.7 Hiệu ứng Dopper
Khi nguồn tín hiệu và bên thu chuyển động tương đối với nhau, tần số tín hiệu thu
không giống bên phía phát. Khi chúng di chuyển cùng chiều thì tần số nhận được lớn hơn tần
số tín hiệu phát, và ngược lại khi chúng di chuyển ra xa thì tần số tín hiệu thu được giảm
xuống. Đây là hiệu ứng Doppler.
1.2 Một số sensor đo từ trƣờng
1.2.1 Sensor hiệu ứng Hall
Thiết bị sử dụng hiệu ứng Hall khá phổ biến và được sử dụng rộng rãi trong đo đạc từ
trường mạnh, nó dựa trên hiệu ứng Hall được Edwin H.Hall phát hiện ra vào năm 1897. Hiệu
ứng Hall là một hệ quả của định luật lực Lorentz, một điện tích chuyển động q, đi qua một từ
trường có cảm ứng từ
B
, sẽ chịu tác dụng của lực
F
, vector vận tốc
v
của điện tích tuân theo
phương trình:
F q E v B
(1.6)
Thiết bị sử dụng hiệu ứng Hall bao gồm một vật dẫn hoặc bán dẫn phẳng mỏng hình
chữ nhật với hai cặp điện cực.
1.2.2 Sensor proton precession
Từ kế proton precession hoạt động dựa trên lý thuyết các hạt nhân chuyển động có cả
momen góc
L
và momen từ
sẽ tiến động trong từ trường giống như con quay hồi chuyển.
Khi chất lỏng đạt đến trạng thái cân bằng từ, từ trường được ngắt ra và hạt nhân bắt
đầu hồi chuyển xung quanh hướng của từ trường ngoài cho đến khi nó trở lại trạng thái ngẫu
nhiên ban đầu. Quá trình kích thích-hồi phục này diễn ra trong thời gian vài giây. Benzence là
hydrocacbon hay được sử dụng cho từ kế hồi chuyển.
1.2.3 Sensor bơm quang học
Từ kế bơm quang học dựa trên hiệu ứng Zeeman. Hiệu ứng này thể hiện mạnh nhất ở
các chất Rb, Li, Cs…. Hình 1.8 là cấu trúc phổ mở rộng electron hóa trị của Rb 85, nguyên tố
sử dụng phổ biến trong từ kế bơm quang học. Mối tương quan năng lượng - tần số của những
vạch phổ mở rộng tỷ lệ với cường độ từ trường ngoài. Số lượng tử từ m liên quan tới số
momen góc và đặc biệt là độ lớn thành phần hữu dụng của momen từ dọc trường tác động.
4
1.2.4 Sensor SQUID
Năm 1962 Brian D.Josephson dự đoán rằng dòng siêu dẫn có thể chạy qua hai chất
siêu dẫn tách biệt nhau bởi một lớp cách điện mỏng. Độ lớn dòng siêu dẫn tới hạn qua chuyển
tiếp Josephson bị ảnh hưởng bởi sự có mặt của từ trường đây là nguyên lý cơ bản của từ kế
SQUID (Superconducting quantum interference device). Từ kế chế tạo dựa trên thiết bị siêu
dẫn lượng tử (SQUID) là thiết bị đo cường độ từ trường nhạy nhất hiện nay.
1.2.5 Sensor Fluxgate
Từ kế fluxgate là thiết bị đo cường độ từ trường được sử dụng cả ở trên mặt đất và
trong không gian. Nó ổn định, đáng tin cậy, kích thước nhỏ và yêu cầu rất ít năng lượng khi
hoạt động. Những thuộc tính này cùng với khả năng đo vector của từ trường 0.1 nT đến 1 mT
trong dải tần số từ dc đến một vài Hz đã khiến nó trở thành một thiết bị khá linh hoạt. Các nhà
địa chất sử dụng chúng để thăm dò, các nhà địa vật lý sử dụng chúng để nghiên cứu trường địa
từ (cỡ 20 μT đến 70 μT trên bề mặt Trái đất). Các kỹ sư vệ tinh sử dụng chúng để xác định và
điều khiển tàu không gian, các nhà khoa học sử dụng chúng trong nghiên cứu, và quân đội sử
dụng chúng cho rất nhiều mục đích bao gồm tìm kiếm mỏ, phát hiện thiết bị giao thông và
nhận dạng mục tiêu.
Một số fluxgate sensor
Sau đây ta sẽ mô tả hoạt động của một sensor lõi tròn làm từ vật liệu sắt từ dễ bão hòa.
Có hai cuộn dây quấn trên lõi, cuộn kích thích và cuộn tín hiệu, trục của hai cuộn dây trực
giao nhau.
Khi đưa dòng điện xoay chiều vào cuộn dây kích thích. Dòng điện sẽ tạo ra
một từ trường lan truyền trong lõi từ. Từ trường này làm từ thông trong lõi bão hòa tuần hoàn
theo chiều kim đồng hồ và ngược chiều kim đồng hồ. Khi lõi chưa bão hòa thì nó có độ từ
5
thẩm lớn hơn rất nhiều so với 1. Theo định luật Faraday, từ thông thay đổi sẽ sản sinh ra điện
thế tỷ lệ với sự thay đổi của từ thông ở hai đầu cuộn dây tín hiệu.
Độ từ thẩm của lõi thay đổi từ thấp đến cao, tạo ra một xung điện thế có biên độ tỷ lệ
với độ lớn của từ trường ngoài ở đầu ra của cuộn tín hiệu và pha của xung điện thế này cho
biết hướng của từ trường. Tần số của tín hiệu bằng hai lần tần số kích thích do sự chuyển trạng
thái bão hòa xuất hiện hai lần trong một chu kỳ kích thích.
1.2.6 Sensor hiệu ứng từ trở
Hiệu ứng từ trở được đưa ra đầu tiên bởi William Thomson vào giữa thế kỷ 19. Ông
thấy rằng từ trường tác động vào vật liệu sắt từ sẽ làm thay đổi điện trở suất của nó. Lượng
thay đổi này phụ thuộc mức độ từ hóa và hướng dòng điện chạy qua. Khi cường độ từ trường
tăng, thay đổi điện trở suất tăng theo và tiệm cận đến giá trị lớn nhất khi vật liệu bão hòa từ.
1.3 Phân cấp sensor theo khoảng đo
Dựa vào khoảng đo thì chúng được chia thành 2 loại chính: Sensor đo từ trường yếu
(<1mT) thường được gọi là từ kế (magnetometers). Còn sensor đo từ trường mạnh (>1mT)
được gọi là từ kế Gauss (Gaussmeters). Qua bảng phân loại sau ta sẽ thấy rõ điều này:
Bảng phân loại sensor đo từ trường theo khoảng đo
Các loại sensor đo từ trƣờng
Từ kế (B<1mT)
Từ kế Gauss (B>1mT)
+ Hiệu ứng Hall
+ Diode từ
+ Transistor từ
+ Từ trở
Vô hƣớng
+ Proton precession
+ Bơm quang học
Vector
+ Lõi chọn lọc
+ Fluxgate
+ SQUID
+ Từ trở
+ Sợi quang học
6
CHƢƠNG 2 - THIẾT KẾ THIẾT BỊ
2.1 Nguyên lí hoạt động của thiết bị
Thiết bị phát hiện thăng giáng từ trường nhỏ dựa trên nguyên lí Fluxgate được phòng
thí nghiệm đã xây dựng theo sơ đồ khối như trên hình 2.1:
Hình 2.1: Sơ đồ khối của thiết bị phát hiện từ trường nhỏ
Phần quan trọng nhất của thiết bị phát hiện từ trường nhỏ là đầu dò (hay Sensor).
Muốn cho sensor hoạt động thì cần phải có một tín hiệu dòng xoay chiều đủ công suất để nuôi
nó. Do đó, phải cần có khối phát xung. Khối phát xung này có tác dụng tạo ra các xung vuông
nhằm cung cấp một công suất cho đầu dò hoạt động. Dạng xung sau khối phát xung này
không đều đặn. Mà để tạo ra dạng sóng sine thì ta cần phải có các xung đều đặn. Vì vậy, ta
cần phải có khối chia tần để tạo ra các xung vuông có độ trống bằng 1/2. Sau sensor là các
khối khuếch đại tín hiệu và khối xử lí. Khối khuếch đại cho phép khuếch đại các tín hiệu từ
trường rất nhỏ. Khối xử lí có tác dụng chỉnh lưu tín hiệu xoay chiều thành một chiều. Sau
khối xử lí, tín hiệu được đưa ra khối chỉ thị để hiển thị các giá trị cần đo đạc. Nếu cần chính
xác cao, tín hiệu sau khối xử lí có thể được ghép nối với PC thông qua bộ chuyển đổi ADC để
có thể ghi tự động. Khối ghép nối này có thể sử dụng những thiết bị có sẵn trong các phòng
thí nghiệm.
2.2 Khối analog của thiết bị
2.2.1 Khối phát xung
Linh kiện chủ yếu của mạch phát xung là các IC 4011, được tạo thành từ các mạch
NAND thuộc loại CMOS. Mạch phát xung làm việc ở tần số 10kHz.
2.2.2 Khối chia tần
Khối phát
xung
Chia tần
Khối tạo
sóng sine
Khuếch đại
công suất
Khuếch đại
Xử lý
Chỉ thị
SENSOR
(đầu dò)
ADC
PC
7
Mục đích của khối chia tần: Hình 2.3 cho thấy xung không đều đặn. Do đó, mục đích
của khối chia tần là để tạo ra các xung đều đặn, tức là các xung vuông có độ trống bằng 1/2.
Mạch chia tần làm việc ở tần số 2,5kHz. Khối chia tần mà phòng thí nghiệm đã thực hiện ở
đây được xây dựng từ hai IC 4013. Qua khối này sẽ thực hiện được hai lần chia tần.
2.2.3 Khối tạo sóng sin và khối khuếch đại công suất
Ý nghĩa: Tạo sóng hình sine đơn sắc đủ công suất để nuôi Sensor. Mạch tạo sóng sine
và khuếch đại công suất làm việc ở tần số 2,5kHz.
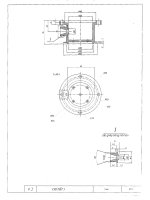
2.2.4 Đầu dò từ trƣờng nhỏ
Đầu dò từ trường nhỏ được cấu tạo bởi 2 lá Permaloi, mỗi lá Permaloi có chiều dài
200(mm), chiều rộng 5(mm) và dày 0,03(mm).
Hình 2.11: Cấu tạo đầu dò từ trường
+ Cuộn sơ cấp: Bao gồm 2 cuộn dây được cuốn trên 2 lá permaloi. Các cuộn dây này
được cuốn xung đối với nhau. Mỗi cuộn dây gồm 400 vòng, có kích thước 0,08(mm).
+ Cuộn thứ cấp: Cuộn thứ cấp có 600 vòng dây, kích thước 0,01(mm) bao xung
quanh toàn bộ hai lá permaloy và các cuộn dây sơ cấp.
Nguyên lí: Để đo đạc các tín hiệu từ trường yếu, ta phải thiết kế sensor có khả năng
đặc biệt để phát hiện hài thứ cấp. Ở đây, hai lõi song song nhau được tác động theo hai hướng
ngược chiều nhau trong một mạch kích thích trường, có cả một cuộn dây thứ cấp đơn bao
quanh. Hai cuộn sơ cấp sẽ mắc xung đối làm triệt tiêu tín hiệu trong trường hợp cân bằng,
nhưng lại phát hiện ra pha của hài thứ cấp khi có sự xuất hiện của từ trường ngoài.
2.2.5 Khối khuếch đại tín hiệu
Tín hiệu ở lối ra khối khuếch đại: X
R
= K.X
V
Trong đó: K là hệ số khuếch đại, X
R
và X
V
là các giá trị đầu ra và đầu vào.
Công suất đầu ra của mạch khuếch đại lớn hơn công suất đầu vào. Nhờ có khuếch đại,
độ nhạy của thiết bị đo được tăng lên rất nhiều lần, cho phép phát hiện được giá trị của các tín
hiệu rất nhỏ.
2.2.6 Khối xử lí
Thứ cấp
Sơ cấp
8
Khối xử lí tín hiệu trong thiết bị sử dụng mạch khuếch đại chỉnh lưu, có nhiệm vụ biến
đổi tín hiệu xoay chiều thu được ở lối ra của khối khuếch đại tín hiệu sang tín hiệu một chiều
để dễ dàng chỉ thị và đánh giá.
Mạch chỉnh lưu tốt phải là mạch có hiệu suất (tỉ số giữa công suất đầu ra và công suất hữu ích
đầu vào) cao, ít phụ thuộc vào tải, độ gợn sóng của điện áp ra một chiều là nhỏ.
2.2.7 Khối chỉ thị
Khối chỉ thị hay chính xác là bộ biến đổi Analog – Digital, có nhiệm vụ biến đổi tín
hiệu (sau khối xử lí và khối khuếch đại) từ dạng tương tự sang dạng số để hiển thị lên bảng
điện tử dạng số.
Có thể chỉ thị bằng đồng hồ hiện số đa năng, hoặc cũng có thể đưa thiết bị phát hiện từ
trường nhỏ này ghép nối với máy tính để đo tự động.
2.3 Khối ghép nối máy vi tính
Để thuận tiện cho việc quan sát sự thăng giáng của từ trường chúng ta có thể ghi lại
kết quả đo vào máy tính thông qua mạch chuyển đổi tương tự - số ADC, kết hợp với phần
mềm đọc chương trình đo.
Khối ghép nối máy tính giao tiếp với máy tính thông qua cổng USB, phần mềm được
viết trên nền Visual Basic.
2.3.1 Phần cứng khối ghép nối
Phần cứng của khối ghép nối máy tính bao gồm:
+ Khối khuếch đại
+ Khối vi điều khiển
+ Khối giao tiếp với máy tính
+ Khối nguồn
2.3.2 Phần mềm đọc chƣơng trình
Mã nguồn được viết trên Visual Basic. Sau khi được cài đặt cho máy tính muốn
chương trình hoạt động ta cho kết nối mạch ADC với máy tính.
2.3.4 Tính năng của khối ghép nối máy tính
Hệ thống ghép nối thiết bị nêu trên cho phép thực hiện phép đo tín hiệu nhỏ từ sensor
với các đặc điểm chính như sau:
9
Tần số biến đổi của tín hiệu < 1000 Hz
Tốc độ lấy mẫu từ 1ms đến 5000 ms
Đo tương quan hai tín hiệu với nhau
Biên độ tín hiệu vào 1mV
Nguồn nuôi sử dụng nguồn 5V từ máy tính qua ngay cổng ghép nối với máy tính.
CHƢƠNG 3 - CẢI THIỆN TỈ SỐ S/N
3.1 Tỉ số tín hiệu trên tạp S/N
3.1.1 Khái niệm tỉ số tín hiệu trên tạp
Mục đích của việc nghiên cứu tạp âm là để tìm cách hạn chế nó ở mức thấp nhất so
với tín hiệu có ích. Để so sánh tạp âm với tín hiệu, người ta dùng tỉ số S/N (được viết tắt từ
chữ Signal/Noise trong tiếng Anh).
Tỉ số tín hiệu trên tạp âm được xác định theo biểu thức:
2
ta
2
th
ta
th
X
X
P
P
N
S
(3.1)
Trong đó: P
th
là công suất của tín hiệu.
P
ta
là công suất của tạp âm.
X
th
là trị hiệu dụng của tín hiệu (U
th
hoặc I
th
).
X
ta
là trị hiệu dụng của tạp âm (U
ta
hoặc I
ta
).
3.1.2 Hệ số tạp âm F
Hệ số tạp âm F là tỉ số S/N ở đầu vào với tỉ số S/N ở đầu ra.
taVP
tar
tarthr
taVthV
P.K
P
P/P
P/P
F
(3.2)
Hệ số tạp âm thường được tính bằng dexiben (dB). Hệ số tạp âm được dùng để so sánh
tạp âm của nhiều bộ khuếch đại với nhau trong cùng những điều kiện như nhau.
3.1.3 Một số loại tạp thƣờng gặp
Tạp nhiệt (thermal noise)
Tạp nhiệt là nguồn tạp phổ biến nhất trong các linh kiện và thiết bị điện tử.
Tạp nổ (shot noise)
Nguồn gốc tạp nổ là do sự dao động của dòng hạt tải tự do khi chạy qua một khe hay
rào năng lượng.
Tạp phát sinh tái hợp (genreration - recombination noise, hay G - R noise)
10
Nguồn gốc tạp phát sinh tái hợp là do các hạt tải tự do bị thăng giáng tự phát bởi các
tâm phát sinh tái hợp ơ trong khối và bề mặt vật liệu linh kiện
Tạp 1/f (1/f noise or ficker noise)
Đây là loại tạp có đặc điểm là mật độ phổ tạp tỷ lệ nghịch với tần số:
Tạp thác lũ (avalanche noise)
Nguồn gốc tạp thác lũ là do các hạt tải được tăng tốc ở trong điện trường cao va chạm
làm phát sinh ra các hạt tải khác (hạt tải thứ cấp). Quá trình này có tính ngẫu nhiên nên tạo ra
tạp thác lũ.
Tạp bập bùng (burst or popcorn noise)
Tạp này có dạng gồm các xung ngẫu nhiên nối tiếp có độ dài thay đổi, độ cao như
nhau hoặc khác nhau. Nguồn gốc của tạp bập bùng đến nay vẫn chưa rõ hoàn toàn, có thể là
do sự đánh thủng địa phương, do sự bất đồng đều của vật liệu hoặc do các khuyết tật của
mạng tinh thể làm sai lệch mạng và tạo nên các tâm bắt với mật độ lớn….
3.2 Một số phƣơng pháp nâng cao tỉ số S/N
3.2.1 Trùng phùng tín hiệu, loại trừ nhiễu
Để hạn chế những ảnh hưởng của nhiễu từ những nguồn khác, người ta sử dụng thêm
một đầu thu B. Bên cạnh đó, ta sử dụng phương pháp che chắn không gian kiểu Telescope để
chắn cả 2 đầu thu A và B, sao cho nếu có các nhiễu ảnh hưởng đến đầu thu A và B thì nó chỉ
có ảnh hưởng nhỏ và không đồng thời. Và sử dụng phép trùng phùng trên cơ sở mạch AND ở
lối ra của 2 đầu thu A và B.
3.2.2 Phƣơng pháp lọc tần số
Giả sử ta có hai nguồn bức xạ nhiệt với các nhiệt độ T
1
và T
2
tương ứng.
Do T
2
> T
1
nên tín hiệu thu từ nguồn T
1
sẽ nhỏ hơn nhiều so với phông tạp nhiễu từ
nguồn T
2
.
11
Hình 3.5: Lọc tần số, làm tăng tỉ số S/N
Nếu ta cắt bỏ toàn bộ phần bên trái của đồ thị kể từ λ
m2
, chỉ giữ lại phần bên phải thì ta
thấy rõ tỉ số S
2
/N
2
sẽ lớn hơn. Thực tế, việc cắt bỏ nói trên được thực hiện bằng các kính lọc
tần số thích hợp trước khi cho bức xạ đến đầu thu.
3.2.3 Phƣơng pháp Lock-in (chọn pha)
Lock-in là một bộ khuếch đại tín hiệu điện xoay chiều, cho tín hiệu ở lối ra là một
chiều. Nó được ứng dụng để phát hiện và đo tín hiệu xoay chiều nhỏ, có khả năng loại trừ
nhiễu tốt. Bao gồm hai lối vào và một lối ra:
Hình 3.6: Sơ đồ khối của bộ Lock-in
+ Lối vào 1 là lối tín hiệu cần đo, lối vào 2 là lối tín hiệu chuẩn
+ Bộ Lock-in có khả năng loại các nhiễu có tần số ngẫu nhiên.
+ Bộ Lock-in có khả năng loại các nhiễu cùng tần số với tín hiệu di pha.
3.2.4 Phƣơng pháp Boxcar
Là mạch lấy mẫu tín hiệu tại các thời điểm đặt trước, nhớ độ lớn tín hiệu tại các thời
điểm đó và cho phép mô tả lại biễu diễn của tín hiệu theo thời gian.
Điều kiện phổ biến khi lấy mẫu: tín hiệu lặp lại tuần hoàn. Khi tín hiệu lặp lại tuần
hoàn, ta không cần phải đo tín hiệu trong suốt thời gian t mà chúng ta có thể đo tín hiệu tại
(a)
(b)
12
thời điểm t
1
nào đó. Từ đó, tín hiệu sẽ được xây dựng lại. Do đó, có thể giảm nhiễu vì chúng
ta có thể chọn được các thời điểm thu sao cho nhiễu ít nhất, tín hiệu được xây dựng lại là tốt
nhất. Nên nâng cao được tỉ số tín hiệu trên tạp S/N
CHƢƠNG 4 - MỘT SỐ KẾT QUẢ THỰC NGHIỆM
4.1 Mô phỏng việc dùng Boxcar để lấy mẫu tín hiệu tại 2 thời điểm cố định, tìm
thông số đo
+ Mạch Boxcar là mạch lọc và lấy mẫu trong khoảng thời gian ∆t bất kì nên ta có thể
chọn khoảng tín hiệu ít nhiễu nhất để thao tác, đo đạc.
+ Dùng hệ nhiều mạch Boxcar ta có thể lấy mẫu tại nhiều thời điểm khác nhau, từ đó
có thể tính toán sự suy giảm của đồ thị và tìm ra thông số cần đo.
Để làm rõ đặc điểm trên của mạch Boxcar ta xét một ví dụ sau:
Xét trường hợp tâm bắt điện tử trong bán dẫn loại N của cấu trúc P
+
- N (Hệ đo tâm
sâu DLTS dùng mạch Boxcar). Kích thích mô
̣
t xung điện vào chuyển tiếp và đo sự thay đổi
điện dung lớp chuyển tiếp.
0n
( ) exp(-e t)C t C
Với
2
T
E
. exp( )
k.T
n
e AT
Dựa vào quy luật biến đổi của C(t) ta có thể tìm ra E
T
. Hình 4.1 là đồ thị mô phỏng
quá trình trên:
Hình 4.1: Mô phỏng việc dùng Boxcar để lấy mẫu tín hiệu tại 2 thời điểm cố định
(a) Dạng đường C(t) khi T thay đổi. (b) Đồ thị sự phụ thuộc của e
n
vào nhiệt độ.
Các đường màu đỏ là các đường C(t) khi T thay đổi. Hai đường thẳng góc với trục
hoành là 2 đường tương ứng với 2 thời điểm t
1
và t
2
mà cổng Boxcar tiến hành lấy mẫu.
(a) (b)
13
4.2 Mô phỏng “giải pháp nâng cao tỉ số S/N bằng phƣơng pháp Boxcar”
dùng phần mềm Matlab
4.2.1 Mô phỏng tín hiệu của khối phát xung
Tín hiệu của khối phát xung là xung vuông vì vậy ta có thể mô phỏng một xung vuông
tuần hoàn bằng hàm plot vẽ tất các các cặp điểm (x, y).
Hình 4.2: Mô phỏng tín hiệu sau khối phát xung
4.2.2 Mô phỏng tín hiệu sau khối chia tần
Hình 4.3: Mô phỏng tín hiệu sau khối chia tần
Để mô phỏng xung vuông sau khối chia tần ta cũng dùng cách thức như trên hoặc là
dùng hàm u=A.*square(2*pi*F*t) vẽ xung vuông trong trường hợp xung vuông là xung đều
đặn (có độ trống bằng 1/2). Trong đó A là biên độ xung, F là tần số của xung.
4.2.3 Mô phỏng tín hiệu của mạch tạo sóng sin
Tín hiệu sin ở đây là tín hiệu dùng để đưa vào đầu dò (sensor).
14
Hình 4.4: Mô phỏng tín hiệu của mạch phát sóng sin
Để mô phỏng được tín hiệu của mạch phát sóng sin ta chỉ cần sử dụng hàm plot để vẽ
một hàm điều hòa u=A.*(2*pi*F*t). Trong đó A là biên độ sóng sin, F là tần số của sóng.
4.2.4 Mô phỏng tín hiệu nhận đƣợc từ sensor
Để mô phỏng tín hiệu thu được sau sensor ta sử dụng nguyên lí: Chia nhỏ một tín hiệu
bất kì ta sẽ thu được (một cách gần đúng) các tín hiệu dạng sin có tần số và biên độ khác
nhau. Hình 4.5 mô tả tín hiệu thu được sau sensor.
Hình 4.5: Mô phỏng tín hiệu thu được sau sensor (có nhiễu)
4.2.5 Mô phỏng giải pháp Boxcar để nâng cao tỉ số S/N
15
Tín hiệu sau khi được tách sóng (tín hiệu mà ta cần đo) ở đây chính là phần diện tích
có đỉnh cao nhất (phần màu đen). Còn các phần diện tích màu trắng là thành phần nhiễu:
white
brown
S
S
NS
Hình 4.7: Mô phỏng tín hiệu sau khi qua mạch tách sóng đồng bộ
Vậy so sánh với trường hợp khi tín hiệu không qua xử lí Boxcar thì trường hợp có qua
xử lí Boxcar cho ta tỉ lệ S/N tăng lên đáng kể
Hình 4.8: Mô phỏng tín hiệu sau khi xử lí Boxcar
4.3 Một số kết quả thực nghiệm
16
Phông từ trường đo ngày 11/12/2012 tại phòng thí nghiệm của trung tâm khoa học vật
liệu.
Hình 4.9: Phông từ trường Trái Đất đo ngày 11/12/2012
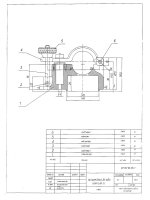
4.4 Đề xuất mạch Boxcar kép dùng cho hệ xử lí tín hiệu nhỏ
Phương pháp này được gọi là phương pháp Boxcar hai cổng (Boxcar hai kênh). Phòng
thí nghiệm chúng tôi đề xuất mạch Boxcar 2 kênh dùng để đo mẫu trong ví dụ của mục 4.1 ở
trên có sơ đồ như sau:
17
Hình 4.12: Sơ đồ mạch Boxcar 2 kênh
Trong đó khối IC 555 có vai trò phát xung đồng bộ cho toàn mạch. IC 74121 tạo ra
xung kích mẫu. Hai nhánh bên dưới hoàn toàn giống nhau chỉ khác nhau ở chỗ mỗi nhánh tạo
ra một xung kim tại các thời điểm khác nhau. Các điện trở 470k có tác dụng điều chỉnh các
thời điểm đó. Trong mỗi nhánh thì cặp IC 74123 có tác dụng tạo ra xung kim dùng để điều
khiển JFET 2N4416 đóng/ mở khi có xung kim kích thích. Khi đó mẫu tín hiệu được giữ tại
thời điểm của xung kim và loại bỏ các phần còn lại.
Tín hiệu một chiều ở hai lối ra A và B được đưa vào mạch trừ. Tín hiệu ra cuối cùng
có thể đưa vào mili Vôn kế hoặc được đưa vào mạch ADC để tự ghi lại kết quả bằng máy tính
từ đó tìm ra thông số cần đo của yêu cầu bài toán đề ra.
18
Hình 4.13: Sơ đồ mạch trừ
Khả năng ứng dụng: Mạch này có thể áp dụngcho các hệ xử lí tín hiệu nhỏ, biến đổi
tuần hoàn, có quy luật nhằm giảm nhiễu, nâng cao tỉ số S/N.
KẾT LUẬN
Trong bản luận văn này, chúng tôi đã tập trung nghiên cứu một số vấn đề sau:
1. Nghiên cứu tổng quan về một số nguyên lí chuyển đổi tín hiệu điện – từ và về một số
loại sensor đo từ trường.
2. Nghiên cứu hoạt động, khảo sát các khối chức năng của thiết bị phát hiện thăng giáng
từ trường nhỏ, được thiết kế, chế tạo tại trường Đại học Khoa học Tự nhiên, ĐH
QGHN. Đồng thời dùng thiết bị này khảo sát, đánh giá sự thăng giáng từ trường của
Trái Đất tại phòng thí nghiệm.
3. Nghiên cứu một số giải pháp làm giảm tạp nhiễu, nâng cao tỷ số S/N. Trong đó
phương pháp xử lý tín hiệu bằng kỹ thuật Sampling and Hold (phương pháp Boxcar)
được đặc biệt quan tâm.
4. Mô phỏng hoạt động của một số khối chức năng trong thiết bị bằng phần mềm Matlab,
mô phỏng phương pháp xử lí tín hiệu dùng cổng Boxcar.
5. Đề xuất mạch Boxcar hai cổng (mạch Boxcar kép) áp dụng cho hệ đo tín hiệu nhỏ.
Nội dung nghiên cứu của luận văn nằm trong phạm vi nội dung đề tài nghiên cứu khoa
học trọng điểm của ĐH Quốc Gia Hà Nội, mã số QGTĐ.10.27 về nghiên cứu, thiết kế và chế
tạo thiết bị phát hiện thăng giáng từ trường nhỏ.
References
A. Tiếng Việt
19
1. Ngạc Văn An (chủ biên), Đặng Hùng, Nguyễn Đăng Lâm, Lê Xuân Thê, Đỗ Trung Kiên
(2006), Vô tuyến điện tử, NXBGD, Hà Nội.
2. Phạm Thượng Hàn (1996), Kỹ thuật đo lường các đại lượng Vật lý, NXBGD, Hà Nội.
3. Phùng Hồ, Phan Quốc Phô (2001), Giáo trình Vật lý bán dẫn, NXBKHKT, Hà Nội.
4. Vũ Thanh Khiết, Nguyễn Thế Khôi, Vũ Ngọc Hồng (1977), Giáo trình điện đại cương tập
3- NXBGD, Hà Nội.
5. Lưu Tuấn Tài (2008), Giáo trình Từ học, NXBĐHQG, Hà Nội.
6. Lê Xuân Thê (2006), Dụng cụ bán dẫn và vi mạch, NXBGD, Hà Nội.
7. Đỗ Xuân Thụ (1999), Kỹ thuật điện tử, NXBGD, Hà Nội.
8. Phạm Quốc Triệu, Phương pháp thực nghiệm Vật lý, Giáo trình khoa Vật lý, trường ĐH
Khoa học Tự Nhiên, Hà Nội.
9. Phạm Quốc Triệu, Đỗ Gia Tùng (2011), Nghiên cứu cải thiện tỷ số S/N của thiết bị phát
hiện thăng giáng từ trường nhỏ, Báo cáo tại Hội nghị Vật lý chất rắn và Khoa học vật liệu
toàn quốc lần thứ 7 (SPMS-2011).
B. Tiếng Anh
10. M.J. Usher and D.A. Keating (1991), Sensor and transducers:characteristics, application,
instrumentation, interfacing, VCH, Weinheim, Germany.
11. Steven A. Macintyre (2000), Magnetic Field Measurement, CRC Press LLC.