luận văn tốt nghiệp lập trình ứng dụng plc s7 - 1200
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (2.16 MB, 130 trang )
Luận văn tốt nghiệp GVHD: Ths. Nguyễn Hoàng Dũng
o⁄\‹?s⁄\‹⁄?m<« s?l‹⁄?k‹ I?g¦?b‹?s⁄
PHỤ LỤC
LỜI NÓI ĐẦU
Ước mơ lớn nhất của người kỹ sư thiết kế là
nắm trong tay một công cụ điều khiển mạnh, đa năng
và mềm dẻo. Theo đà phát triển của công nghệ điện
tử, các chip vi xử lý, vi điều khiển, bộ logic có thể lập
trình, máy tính PC lần lượt ra đời đã đáp ứng được ước
mơ đó. Và chúng nhanh chóng là những giải pháp
được lựa chọn để tự động hóa quá trình sản xuất.
Trong nhiều nghành công nghiệp hiện nay, nhất là
ngành công luyện kim, chế biến thực phẩm…Bộ logic
có thể lập trình (P
romamable Logic Controller ) là một
thiết bị không thể thiếu trong dây truyền sản xuất. Nắm
bắt được tầm quan trọng đó,nên chúng tôi đã tiến hành
tìm hiểu, nghiên cứu và lấy đó là đề tài luận văn tốt
nghiệp cho mình.
Dù đã cố gắng hết sức nhưng có thể không tránh
khỏi những thiếu sót. Rất mong nhận được ý kiến đóng
góp từ quí thầy cô và đọc giả.
SVTH: TạMinh Liền
Phan Thanh Năm
Luận văn tốt nghiệp GVHD: Ths. Nguyễn Hoàng Dũng
o⁄\‹?s⁄\‹⁄?m<« s?l‹⁄?k‹ I?g¦?b‹?s⁄
Lời cảm ơn
Tóm tắt
Tổng quan vềđềtài
Chương I:Cơ sở lý thuyết vềPLC S7 – 1200
1. Tổng quan vềsản phẩm 3
2. Phân loại 4
3. Hình dạng bên ngoài 5
4. Cấu trúc bên trong 6
5. Đấu dây 7
6. Module mở rộng 9
7. Phương pháp lập trình điều khiển 10
8. Ngôn ngữ lập trình 11
9. Phần mềm lập
trình 13
10. Tập lệnh của PLC S7-1200 19
Chương II: Lập trình ứng dụng PLC S7 – 1200.
1. Ứng dụng 1: Điều khiển băng truyền đóng gói trái cây 117
2. Ứng dụng 2: Điều khiển hệthống trộn dụng dịch 125
3. Ứng dụng 3: Dùng S7 – 1200 đóng mở cửa tự động 127
4. Và một số ứng dụng khác 129
Chương III: Kết quảvà kiến nghị
1. Kết quả
2. Kiến nghị
Tài liệu tham khảo
Luận văn tốt nghiệp GVHD: Ths. Nguyễn Hoàng Dũng
o⁄\‹?s⁄\‹⁄?m<« s?l‹⁄?k‹ I?g¦?b‹?s⁄
LỜI CẢM ƠN
Xin chân thành cảm ơn cha mẹ, anh (chị em) đã tạo mọi điều kiện để
chúng tôi có thể hoàn thành tốt bài luật văn tốt nghiệp.
Xin chân thành cảm ơn Thầy Nguyễn Hoàng Dũng đã tận tình hướng
dẫn và giúp đỡ chúng em trong suốt thời gian thực hiện luật văn tốt nghiệp.
Xin cảm ơn thầy cô bộ môn tự động hóa và các bạn sinh viên cùng
khóa đã đóng góp những ý kiến quý báu để chúng tôi có thể hoàn thành tiểu
luận này.
Nhóm sinh viên thực hiện:
Tạ Minh Liền (1063740)
Phan Thanh Năm (1063745)
Sinh viên k32
lớp :điều khiển tự động
năm học: 2006 - 2010
Luận văn tốt nghiệp GVHD: Ths. Nguyễn Hoàng Dũng
o⁄\‹?s⁄\‹⁄?m<« s?l‹⁄?k‹ I?g¦?b‹?s⁄
TÓM TẮT
TỔNG QUAN VỀ ĐỀ TÀI
Luận văn tốt nghiệp GVHD: Ths. Nguyễn Hoàng Dũng
o⁄\‹?s⁄\‹⁄?m<« s?l‹⁄?k‹ I?g¦?b‹?s⁄
Chương I: Cơ sở lý thuyết vềPLC S7 – 1200
1. Tổng quan vềPLC S7 – 1200
Luận văn tốt nghiệp GVHD: Ths. Nguyễn Hoàng Dũng
o⁄\‹?s⁄\‹⁄?m<« s?l‹⁄?k‹ I?g¦?b‹?s⁄
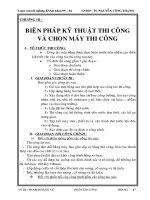
Hinh 2.1. Hình dạng bên ngoai của S7 – 1200 và các module mở rộng
PLC S7-1200 ( P
romamable Logic Controller) là những kết hợp I/O và các
lựa chọn cấp nguồn, bao gồm 9 module các bộ cấp nguồn cả VAC – hoặc
VDC - các bộ nguồn với sự kết hợp I/O DC hoặc Relay. Các module tín hiệu
để mở rộng I/O và các module giao tiếp dễ dàng kết nối với các mặt của bộ
điều khiển. Tất cả các phần cứng Simatic S7-1200 có thể được gắn trên DIN
rail tiêu chuẩn hay trực tiếp trên bảng điều khiển, giảm được không gian và
chí phí lắp đặt.
Các module tín hiệu có trong các model đầu vào, đầu ra và kết hợp loại 8,
16, và 32 điểm hỗ trợ các tín hiệu I/O DC, relay và analog. Bên cạnh đó, bảng
tín hiệu tiên tiến có trong I/O số 4 kênh hay I/O analog 1 kênh gắn đằng trước
bộ điều khiển S7-1200 cho phép nâng cấp I/O mà không cần thêm không
gian. Thiết kế có thể mở rộng này giúp điều chỉnh các ứng dụng từ 10_I/O
đến tối đa 284_I/O, với khả năng tương thích chương trình người sử dụng
nhằm tránh phải lập trình lại khi chuyển đổi sang một bộ điều khiển lớn hơn.
Các đặc điểm khác: bộ nhớ 50 KB với giới hạn giữa dữ liệu người sử
dụng và dữ liệu chương trình, một đồng hồ thời gian thực, 16 vòng lặp PID
với khả năng điều chỉnh tự động, cho phép bộ điều khiển xác định thông số
vòng lặp gần tối ưu cho hầu hết các ứng dụng điều khiển quá trình thông
dụng. Simatic S7-1200 cũng có một cổng giao tiếp Ethernet 10/100Mbit tích
hợp với hỗ trợ giao thức Profinet cho lập trình, kết nối HMI /SCADA hay nối
mạng PLC với PLC.
Luận văn tốt nghiệp GVHD: Ths. Nguyễn Hoàng Dũng
o⁄\‹?s⁄\‹⁄?m<« s?l‹⁄?k‹ I?g¦?b‹?s⁄
2. Phân loại
Việc phân loại S7-1200 dựa vào loại CPU mà nó trang bị:
Các loại PLC thông dụng: CPU 1211C, CPU 1212C, CPU 1214C
Thông thường S7-200 được phân ra làm 2 loại chính:
Loại cấp điện 220VAC:
- Ngõ vào: Kích hoạt mức 1 ở cấp điện áp +24VDC(từ 15VDC – 30VDC).
- Ngõ ra: Relay.
- Ưu điểm của loại này là dùng ngõ ra Relay. Do đó có thể sử dụng ngõ
ra ở nhiều cấp điện áp khác nhau( có thể sử dụng ngõ ra 0V, 24V,
220V…)
- Tuy nhiên, nhược điểm của nó là do ngõ ra Relay nên thời gian đáp
ứng không nhanh cho ứng dụng biến điệu độ rộng xung, hoặc Output
tốc độ cao…
Loại cấp điện áp 24VDC:
- Ngõ vào: Kích hoạt mức 1 ở cấp điện áp +24VDC( từ 15VDC –
30VDC).
- Ngõ ra: transistor
- Ưu điểm của loại này là dùng ngõ ra transistor. Do đó có thể sử dụng
ngõ ra này để biến điệu độ rộng xung, Output tốc độ cao…
- Tuy nhiên, nhược điểm của loại này là do ngõ ra transistor nên chỉ có
thể sử dụng một cấp điện áp duy nhất là 24VDC, do vậy sẽ gặp rắc rối
trong những ứng dụng có cấp điện áp khác nhau. Trong trường hợp
này, phải thông qua một Relay 24VDC đệm.
Bảng 1.1: các đặc điểm cơ bản của s7-1200
Đặc trưng
CPU 1211C
CPU 1212C
CPU 1214C
Kích thướt(mm)
90 x 100 x 75
110 x 100 x 75
Bộ nhớ người dùng
Bộ nhớ làm việc
Bộ nhớ tải
Bộ nhớ sự kiện
25 Kbytes
1 Mbytes
2 Kbytes
50 Kbytes
2 Mbytes
2 Kbytes
Phân vùng I/O
Digital I/O
Analog I
6 inputs / 4
outputs
2 inputs
8 inputs / 6 outputs
2 inputs
14 inputs / 10
outputs
2 inputs
Luận văn tốt nghiệp GVHD: Ths. Nguyễn Hoàng Dũng
o⁄\‹?s⁄\‹⁄?m<« s?l‹⁄?k‹ I?g¦?b‹?s⁄
Tốc độ xử lý ảnh
1024 bytes (inputs) and 1024 bytes (outputs)
Modul mở rộng
None
2
8
Mạch tín hiệu
1
Modul giao tiếp
3 (left-side expansion)
Bộ đếm tốc độ cao
Trạng thái đơn
Trạng thái đôi
3
3 – 100 kHz
3 – 80 kHz
4
3 – 100 kHz
1 – 30 kHz
3 – 80 kHz
1 – 20 kHz
6
3 – 100 kHz
3 – 30 kHz
3 – 80 kHz
3 – 20 kHz
Mạch ngõ ra
2
Thẻ nhớ
Thẻ nhớ Simatic (tuỳ chọn)
Thời gian lưu trữ khi mất
điện
240h
PROFINET
1 cổng giao tiếp Ethernet
Tốc độ thực thi phép toán
số thực
18us
Tốc độ thi hành
0.1us
3. Hình dạng bên ngoài.(CPU 1212C)
1-Chế độ hoạt động của các ngõ I/O
2-Chế độ hoạt động của PLC
3-Cổng kết nối
4-Khe cắm thẻ nhớ
5-Nơi gắn dây nối
Hinh 2.2. Hình dạng bên ngoài của S7 – 1200 (CPU 1212C)
CPU 1212C gồm 10 ngõ vào và 6 ngõ ra, có khả năng mở rộng thêm 2
module tín hiệu (SM), 1 mạch tín hiệu(SB) và 3 module giao tiếp (CM).
Các đèn báo trên CPU 1212C:
STOP / RUN (cam / xanh): CPU ngừng / đang thực hiện chương trình
đã nạp vào bộ nhớ.
Luận văn tốt nghiệp GVHD: Ths. Nguyễn Hoàng Dũng
o⁄\‹?s⁄\‹⁄?m<« s?l‹⁄?k‹ I?g¦?b‹?s⁄
ERROR (màu đỏ): màu đỏ ERROR báo hiệu việc thực hiện chương
trình đã xảy ra lỗi.
MAINT (Maintenance): led cháy báo hiệu việc có thẻ nhớ được gắn vào
hay không.
LINK: Màu xanh báo hiệu việc kết nối với tính thành công.
Rx / Tx: Đèn vàng nhấp nháy báo hiệu tín hiệu được truyền.
Đèn cổng vào ra:
Ix.x (đèn xanh): Đèn xanh ở cổng vào báo hiệu trạng thái tức thời của
cổng Ix.x. đèn này báo hiệu trạng thái của tín hiệu theo giá trị của công
tắc.
Qx.x(đèn xanh): Đèn xanh ở cổng ra báo hiệu trạng thái tức thời của
cổng Qx.x. Đèn này báo hiệu trạng thái của tín hiệu theo giá trị logic
của cổng.
4. Cấu trúc bên trong.
Cũng giống như các PLC cùng họ khác, PLC S7-1200 gồm 4 bộ phận cơ
bản: bộ xử lý, bộ nhớ, bộ nguồn, giao tiếp xuất / nhập.
- Bộ xử lý còn được gọi là bộ xử lý trung tâm (CPU), chứa bộ vi xử lý,
biên dịch các tín hiệu nhập và thực hiện các hoạt động điều khiển theo
chương trình được lưu trong bộ nhớ của PLC. Truyền các quyết định dưới
dạng tín hiệu hoạt động đến các thiết bị xuất.
- Bộ nguồn có nhiệm vụ chuyển đổi điện áp AC thành điện áp DC (24V)
cần thiết cho bộ xử lý và các mạch điện trong các module giao tiếp nhập và
xuất hoạt động.
- Bộ nhớ là nơi lưu trữ chương trình được sử dụng cho các hoạt động
điều khiển dưới sự kiểm soát của bộ vi xử lý.
- Các thành phần nhập và xuất (input / output) là nơi bộ nhớ nhận thông
tin từ các thiết bị ngoại vi và truyền thông tin đến các thiết bị điều khiển. Tín
hiệu nhập có thể từ các công tắc, các bộ cảm biến,… Các thiết bị xuất có thể
là các cuộn dây của bộ khởi động động cơ, các van solenoid,…
- Chương trình điều khiển được nạp vào bộ nhớ nhờ sự trợ giúp của bộ
lập trình hay bằng máy vi tính.
Luận văn tốt nghiệp GVHD: Ths. Nguyễn Hoàng Dũng
o⁄\‹?s⁄\‹⁄?m<« s?l‹⁄?k‹ I?g¦?b‹?s⁄
Hình 2.3: cấu trúc bên trong
5. Đấu dây.
Ở đây ta chọn CPU 1212C, để trình bày đấu dây tiêu biểu:
Chúng ta có thể cung cấp nguồn 24VDC hay 100 – 230VAC cho PLC và
các thông số điện áp được thể hiện ở (Hinh 5).
Luận văn tốt nghiệp GVHD: Ths. Nguyễn Hoàng Dũng
o⁄\‹?s⁄\‹⁄?m<« s?l‹⁄?k‹ I?g¦?b‹?s⁄
Hinh 2.4. Sơ đồ đấu dây S7 -1200 / CPU 1214
Nguồn cung cấp cho PLC là 100 – 230VAC với tần số từ 47Hz – 63Hz.
Điện áp có thể thay đổi trong khoảng từ 85V – 264V . Ở 264V dòng điện tiêu
thụ là 20A.
Nguồn cung cấp là 24VDC. Điện áp có thể thay đổi trong khoảng
20.4V - 28.8V. Ở 28.8V dòng điện tiêu thụ là 12A.
Các ngõ vào được tác động ở mức điện thế tiêu biểu là 24VDC. Các ngõ
ra của PLC ở mức 0 khi công tắc hở hay điện áp <= 5VDC. Ngõ vào ở mức 1
khi công tắc đóng hay điện áp =>15VDC. Thời gian đổi trạng thái từ “0” lên “1”
và từ “1” xuống “0” tối thiểu là 0.1us để PLC nhận biết được.
Các ngõ ra có thể là 5VDC – 30VDC hay 5VAC – 250VAC. Tùy theo yêu
cầu thực tế mà ta có thể nối nguồn khác nhau để phù hợp với ứng dụng của
nó.
6. Module mở rộng.
Luận văn tốt nghiệp GVHD: Ths. Nguyễn Hoàng Dũng
o⁄\‹?s⁄\‹⁄?m<« s?l‹⁄?k‹ I?g¦?b‹?s⁄
Hình 2.5: hình dạng các môđun
Họ PLC S7-1200 cung cấp nhiều nhất 8 module tín hiệu đa dạng và 1
mạch tín hiệu cho bộ xử lý có khả năng mở rộng. Ngoài ra bạn cũng có thể
cài đặt thêm 3 module giao tiếp nhờ vào các giao thức truyền thông.
Bảng 2.2: thông số các môđun
Module
Ngõ vào
Ngõ ra
Ngõ vào / ra
Module tín
hiệu (SM)
Digital
8 x DC
8 x DC
8 x Relay
8 x DC / 8 x DC
16 x DC / 8 x Relay
16 x DC
16 x DC
16 x Relay
16 x DC / 16 x DC
16 x DC / 16 x Relay
Analog
4 x Analog
2 x Analog
4 x Analog / 2 x
Analog
board tín hiệu
(SB)
Digital
-
-
2 x DC / 2 x DC
Analog
-
1 x Analog
-
Module giao tiếp (CM)
RS485
RS232
7. Phương pháp lập trình điều khiển.
Khác với phương pháp điều khiển cứng, trong hệ thống điều khiển có lập
trình, cấu trúc bộ điều khiển và cách đấu dây độc lập với chương trình.
Luận văn tốt nghiệp GVHD: Ths. Nguyễn Hoàng Dũng
o⁄\‹?s⁄\‹⁄?m<« s?l‹⁄?k‹ I?g¦?b‹?s⁄
Chương trình định nghĩa hoạt động điều khiển được viết nhờ sự giúp đỡ của
một máy vi tính.
Để thay đổi tiến trình điều khiển, chỉ cần một thay đổi nội dung bộ nhớ điều
khiển, chứ không cần thay đổi cách nối dây bên ngoài. Qua đó, ta thấy được
ưu điểm của phương pháp điều khiển lập trình được so với phương pháp
điều khiển cứng. Do đó, phương pháp này được sử dụng rất rộng rãi trong
lĩnh vực điều khiển vì nó rất mềm dẻo…
Phương pháp điều khiển lập trình được thực hiện theo các bước sau:
Hinh 2.6 Phương pháp lập trình điều khiển
8. Các ngôn ngữ lập trình.
8.1. Ngôn ngữ lập trình LAD (ladder Logic):
Hinh 2.7 Chương trình LAD
Chương trình LAD (Hinh 8.1) bao gồm cột dọc biểu diễn nguồn điện
logic cùng với các kí hiệu công tắc logic tạo thành một nhánh mạch điện logic
Luận văn tốt nghiệp GVHD: Ths. Nguyễn Hoàng Dũng
o⁄\‹?s⁄\‹⁄?m<« s?l‹⁄?k‹ I?g¦?b‹?s⁄
nằm ngang. Ở hình bên, logic điều khiển được biểu diễn bằng hai công tắc
thường hở, một công tắc thường đóng và một ngõ ra relay logic.
Các kí hiệu công tắc trên được dùng để xây dựng nên bất kì mạch logic
nào: sự kết hợp nhiều mạch logic có thể biểu diễn mạch điều khiển cho một
ứng dụng có logic điều khiển phức tạp. Điều cần thiết cho công việc thiết kế
chương trình ladder là lập tài liệu về hệ thống và mô tả hoạt động của chúng
để người sử dụng hiểu được mạch ladder một cách nhanh chóng và chính
xác.
Các qui ước của ngôn ngữ lập trình LAD:
- Các đường dọc trên sơ đồ biểu diễn đường công suất, các mạch được
nối kết với đường này.
- Mỗi nấc thang (thanh ngang) xác định một hoạt động trong quá trình
điều khiển.
- Sơ đồ thang được đọc từ trái sang phải và từ trên xuống. Nấc ở đỉnh
thang được đọc từ trái sang phải, nấc thứ hai tính từ trên xuống cũng đọc
tương tự… Khi ở chế độ hoạt động, PLC sẽ đi từ đầu đến cuối chương trình
thang sau đó lặp đi lặp lại nhiều lần. Quá trình lần lượt đi qua tất cả các nấc
thang gọi là chu kỳ quét.
- Mỗi nấc thang bắt đầu với một hoặc nhiều ngõ vào và kết thúc với ít
nhất một ngõ ra.
- Các thiết bị điện được trình bày ở điều kiện chuẩn của chúng. Vì vậy,
công tắc thường hở được trình bày ở sơ đồ thang ở trạng thái hở. Công tắc
thường đóng được trình bày ở trạng thái đóng.
- Thiết bị bất kỳ có thể xuất hiện trên nhiều nấc thang. Có thể có một rơle
đóng một hoặc nhiều thiết bị.
- Các ngõ vào và ra được nhận biết theo địa chỉ của chúng, kí hiệu tùy
theo nhà sản xuất qui định.
8.2. Ngôn ngữ lập trình FDB (Funtion Block Diagram):
Luận văn tốt nghiệp GVHD: Ths. Nguyễn Hoàng Dũng
o⁄\‹?s⁄\‹⁄?m<« s?l‹⁄?k‹ I?g¦?b‹?s⁄
Hình 2.8: ví dụ về ngôn ngữ FDB
Phương pháp này có cách biểu diễn chương trình như sơ đồ không tiếp
điểm dùng các cổng logic (thường dùng theo ký tự của EU)
Theo phương pháp này các tiếp điểm ghép nối tiếp được thay thế bằng cổng
AND, các tiếp điểm ghép song song được thay thế bằng cổng OR, các tiếp
điểm thường đóng thì có cổng NOT. Phương pháp này thích hợp cho người
dùng sử dụng kiến thức về điện tử mà đặc biệt là mạch số.
9. Phần mềm lập trình SIMATIC TIA Portal STEP7 Basic.
Phần mềm SIMATIC TIA Portal STEP7 Basic cung cấp một môi trường
thân thiện với người dùng, từ hiệu chỉnh, thư viện, và bộ điều chỉnh logic cần
thiết đến ứng dụng điều khiển.
SIMATIC TIA Portal STEP7 Basic cung cấp công cụ cho quản lý và cấu
hình tất cả các thiết bị trong project, ví dụ như: PLCs và thiết bị HMI.
SIMATIC TIA Portal STEP7 Basic cung cấp hai ngôn ngữ lập trình (LAD và
FBD), thích hợp và hiệu quả trong cải tiến lập trình điều khiển trong ứng
dụng. Ngoài ra SIMATIC TIA Portal STEP7 Basic còn cung cấp bộ công cụ
tạo và cấu hình thiết bị HMI.
SIMATIC TIA Portal STEP7 Basic cung cấp một hệ thống trợ giúp trực
tuyến và cung cấp 2 chế độ hiển thị khác nhau: a project-oriented view và a
task-oriented set of portals.
Luận văn tốt nghiệp GVHD: Ths. Nguyễn Hoàng Dũng
o⁄\‹?s⁄\‹⁄?m<« s?l‹⁄?k‹ I?g¦?b‹?s⁄
9.1. Trình tự các bước thiết kếmột chương trình điều khiển.
Hinh 2.9 Sơ đồ thiết kể một chương trình điều khiển
9.2. Giao diện của phần mềm SIMATIC TIA Portal STEP7 Basic.
Phần mềm SIMATIC TIA Portal STEP7 Basic chạy hệ điều hành
Windows, phần mềm làm nhiệm vụ trung gian giữa người lập trình và PLC.
Hinh 2.10. Giao diện chính của phần mềm.
Luận văn tốt nghiệp GVHD: Ths. Nguyễn Hoàng Dũng
o⁄\‹?s⁄\‹⁄?m<« s?l‹⁄?k‹ I?g¦?b‹?s⁄
Để tạo một project mới ta thực hiện theo các bước sau:
Từ giao diện chính của phần mềm, chọn Start / Create new project / Create /
Create a PLC program / Main
Lúc này vùng soạn thảo chương trình dưới dạng Ladder hiện ra (Hinh 8.3).
Hinh 2.11. Giao diện soạn thảo chính
Các thanh công cụ thường dùng:
Mở chương trình mới.
Mở chương trình đã có sẳn.
Lưu chương trình.
Kiểm tra lỗi trong chương trình.
Nạp chương trình xuống PLC.
Run.
Stop.
Chèn / xóa network
Luận văn tốt nghiệp GVHD: Ths. Nguyễn Hoàng Dũng
o⁄\‹?s⁄\‹⁄?m<« s?l‹⁄?k‹ I?g¦?b‹?s⁄
Thanh công cụ lệnh
Các phần tử lập trình thường dùng:
Các lệnh logic:
Các lệnh timers:
Các lệnh Counter:
Các lệnh so sánh:
Các lệnh toán học:
Luận văn tốt nghiệp GVHD: Ths. Nguyễn Hoàng Dũng
o⁄\‹?s⁄\‹⁄?m<« s?l‹⁄?k‹ I?g¦?b‹?s⁄
Các lệnh chuyển đổi:
9.3. Nạp chương trình xuống PLC.
Để nạp chương trình xuống PLC chúng ta thực hiện các bước sau:
Thiết lập PLC: Từ giao diện soạn thảo chính chọn Add new
device / chọn loại PLC. Sau đó chọn online access để lấy địa chỉ IP để
kết nối PLC với máy tính.
Chọn PLC ở chế độ STOP bằng cách từ menu chính chọn
Luận văn tốt nghiệp GVHD: Ths. Nguyễn Hoàng Dũng
o⁄\‹?s⁄\‹⁄?m<« s?l‹⁄?k‹ I?g¦?b‹?s⁄
Online / STOP (hinh 9.3.) hoặc click trái chuột lên biểu tượng trên
thanh công cụ. Lúc này trên giao diện xuất hiện hộp thoại thông báo
xác nhận việc chọn PLC ở chế STOP, chọn yes.
Từ menu chính chọn Online / download to device hoặc click trái
chuột lên biểu tượng từ thanh công cụ để nạp chương trình
xuống PLC.
Hinh 2.12. Tạm dừng hoạt động của PLC.
9.4. Giao tiếp giữa máy tính và PLC.
Do PLC có hỗ trợ sẳn dây cáp nối với máy tính nên ta chỉ cần nối PLC
với máy tính PC qua dây cáp:
Hinh 2.13. Sơ đồ kết nối PLC với máy tính.
10. Tập lệnh của PLC S7-1200
A. CÁC LỆNH CƠ BẢN:
10.1. Các lệnh vềbit
10.1.1. Công tắc:
Công tắc thường hở (Normally Open, viết tắc là NO) và công tắc
thường đóng (Normally Closed, viết tắc là NC). Đối với PLC, mỗi công tắc đại
Luận văn tốt nghiệp GVHD: Ths. Nguyễn Hoàng Dũng
o⁄\‹?s⁄\‹⁄?m<« s?l‹⁄?k‹ I?g¦?b‹?s⁄
diện cho trạng thái một bit trong bộ nhớ dữ liệu hay vùng ảnh của các đầu
vào, ra. Công tắc thường hở (ON – nghĩa là cho dòng điện đi qua) khi bit
bằng 1 còn công tắc thường đóng (ON – nghĩa là không cho dòng điện đi
qua) khi bit bằng 0.
Trong LAD, các lệnh này biểu diễn bằng chính các công tắc thường hở
và thường đóng. Trong FBD, các công tắc thường hở được biểu diễn như các
đầu vòa hoặc ra của các khối chức năng AND, OR hoặc XOR. Công tắc
thường đóng được biểu diễn them dấu đảo(vòng tròn nhỏ) ở đầu vào tương
ứng.
Các ví dụ minh họa:
Ladder(LAD):
Công tắc thường hở:
Hình 2.14. Mô tả lệnh
Công tắc thường đóng:
Hình 2.15. Mô tả lệnh
FBD:
AND:
Luận văn tốt nghiệp GVHD: Ths. Nguyễn Hoàng Dũng
o⁄\‹?s⁄\‹⁄?m<« s?l‹⁄?k‹ I?g¦?b‹?s⁄
OR:
XOR:
Hình 2.16. Mô tả lệnh
10.1.2. Lệnh đảo bit, lệnh sườn:
10.1.2.1. Lệnh đảo
Lệnh đảo thay đổi dòng năng lượng. Nếu dòng năng lượng gặp lệnh
này, nó sẽ bị chặn lại. Ngược lại nếu phía trước lệnh này không có dòng năng
lượng, nó sẽ trở thành nguồn cung cấp dòng năng lượng. Trong LAD, lệnh
này được biểu diễn như một công tắc. Trong FBD, lệnh đảo không có biểu
tượng riêng. Nó được tích hợp như là đầu vào của những khối chức năng
khác(với một vòng tròn nhỏ ở đầu vào của các khối chức năng đó). Trong
STL, lệnh này đảo giá trị của đỉnh ngăn xếp: 0 thành 1 và 1 thành 0. Lệnh này
không có toán hạng.
LAD: LLL?mns?LLL
FDB:
Hình 2.17. Mô tả lệnh
Ví dụ:
LAD:
Luận văn tốt nghiệp GVHD: Ths. Nguyễn Hoàng Dũng
o⁄\‹?s⁄\‹⁄?m<« s?l‹⁄?k‹ I?g¦?b‹?s⁄
FDB:
Hình 2.18. Mô tả lệnh
10.1.2.2. Lệnh sườn:
Đều thuộc nhóm lệnh công tắc, ghi nhận trạng thái các bit dữ
liệu(0 hay 1) quen thuộc với khái niệm “mức”. Các lệnh về sườn ghi
nhận không phải mức đơn thuần mà là sự biến đổi mức. Lệnh sườn
dương (Positive Transition) cho dòng năng lượng đi qua trong khoảng
thời gian bằng thời gian một vòng quét khi ở đầu vào của nó có sự thay
đổi mức từ 0 lên 1. Lệnh sườn âm (Negative Transition) cho dòng năng
lượng đi qua trong khoảng thời gian bằng thời gian một vòng quét khi
đầu vào của nó có sự thay đổi mức từ 1 xuống 0.
Trong LAD, các lệnh này được biểu diễn cũng như các công tắc.
Trong FDB, các lệnh này được biểu diễn bằng các khối chức năng
P và N.
Bảng 2.3: tham số
Parameter
Data
type
Memory
area
Description
<Operand1>
BOOL
I, Q, M, L,
D
Signal to be queried
<Operand2>
BOOL
I, Q, M, L,
D
Edge memory bit in which the signal
state of the previous query is saved.
Ví dụ:
Luận văn tốt nghiệp GVHD: Ths. Nguyễn Hoàng Dũng
o⁄\‹?s⁄\‹⁄?m<« s?l‹⁄?k‹ I?g¦?b‹?s⁄
LAD :
FBD:
LAD:
FDB:
Hình 2.19. Mô tả lệnh
10.1.3. P_TRIG và N_TRIG:
Bảng 1.4: các thông số của lệnh
Parameter
Data
type
Memory
area
Description
<Operand>
BOOL
I, Q, M,
L, D
Edge memory bit in which
the RLO of the last query is
saved.
CLK
BOOL
Current RLO
Luận văn tốt nghiệp GVHD: Ths. Nguyễn Hoàng Dũng
o⁄\‹?s⁄\‹⁄?m<« s?l‹⁄?k‹ I?g¦?b‹?s⁄
Q
BOOL
Result of edge evaluation
Mô tả:
P_TRIG: Khi có tín hiệu xung CLK lệnh bắt đầu hoạt động. Khi tín hiệu
có sự thay đổi mức (0 lên 1) thì ngõ ra Q sẽ được đặt lên 1. Các trường
hợp khác ngõ ra Q ở mức 0.
N_TRIG: Khi có tín hiệu xung CLK lệnh bắt đầu hoạt động. Khi tín hiệu có
sự thay đổi mức (1 xuống 0) thì ngõ ra Q sẽ được đặt lên 1. Các trường
hợp khác ngõ ra Q ở mức 0.
Thí dụ:
LAD:
FBD:
LAD:
FBD:
Chương trình sẽ nhảy đến
lệnh nhảy CAS1 khi ngõ vào
CLK có sự thay đổi mức(1
xuống 0)
Chương trình sẽ nhảy đến lệnh
nhảy CAS1 khi ngõ vào CLK có
sự thay đổi mức(0 lên 1)