Báo cáo hệ thống truyền động servo chủ đề mô phỏng dc servo motor
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (2.09 MB, 27 trang )
<span class="text_page_counter">Trang 1</span><div class="page_container" data-page="1">
B GIÁO D<b>ỘỤC VÀ ĐÀO TẠO</b>
<b>TRƯỜNG ĐẠ</b>I H<b>ỌC SƯ PHẠM KỸ</b> THU T TP. H CHÍ MINH <b>ẬỒKHOA CƠ KHÍ CHẾ TẠO MÁY </b>
BÁO CÁO
MÔN H C: H <b>ỌỆ THỐ</b>NG TRUY<b>ỀN ĐỘ</b>NG SERVO
</div><span class="text_page_counter">Trang 3</span><div class="page_container" data-page="3">2
<b>NỘI DUNG </b>
*B ng thông s c<b>ảố ủa động cơ MT</b>-2240- A:
</div><span class="text_page_counter">Trang 4</span><div class="page_container" data-page="4">3
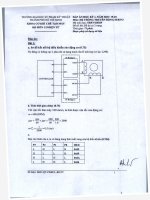
Question 1: Each group has to choose the load parameters including soft-coupling stiffness (K ), inertia moment (J ), and viscous damping (D ) to satisfy the condition: <small>LLL</small>
<b>3 ≤ </b>𝑁𝑁<small>𝐿𝐿𝐿𝐿𝐿</small><b>≤ 10 and 0 ≤ ≤ 0.02 (at least 2 different loads in this range)</b>𝜉𝜉𝜉𝜉𝜉
<b>*Để thể hiện rõ ràng các cấp vận tốc, chúng em chọn position là 400 rad để đồ thị thể hiện rõ các đáp ứng với từng cấp vận tốc và thời gian mô phỏng là 20 giây</b>
- Theo datasheet của động cơ MT-2240-A, ta có thể tóm tắt các thơng số chính sau: - Vậy chọn độ cứng của khớp nối mềm K<small>L</small> = 58 N.m
- Để hệ servo đáp ứng nhanh và không b ị dao động, ta c n ch n các thông s N và theo ầ ọ ố <small>L</small> 𝜉 điều kiện sau:
</div><span class="text_page_counter">Trang 8</span><div class="page_container" data-page="8">7
<b>*Đáp ứng ngõ ra của vị trí: </b>
<b>*Đáp ứng ngõ ra của vận tốc: </b>
</div><span class="text_page_counter">Trang 10</span><div class="page_container" data-page="10">9
<b>*Sơ đồ khối mô phỏng trong matlab simulink: </b>
<b>*Đáp ứng ngõ ra của vị trí: </b>
</div><span class="text_page_counter">Trang 13</span><div class="page_container" data-page="13">12
<b>*Đáp ứng ngõ ra của vị trí: </b>
<b>*Đáp ứng ngõ ra của vận tốc: </b>
</div><span class="text_page_counter">Trang 15</span><div class="page_container" data-page="15">14
<b>*Sơ đồ khối mô phỏng trong matlab simulink: </b>
<b>*Đáp ứng ngõ ra của vị trí: </b>
</div><span class="text_page_counter">Trang 18</span><div class="page_container" data-page="18">17
<b>*Đáp ứng ngõ ra của vị trí: </b>
<b>*Đáp ứng ngõ ra của vận tốc: </b>
</div><span class="text_page_counter">Trang 19</span><div class="page_container" data-page="19">- Tốc độ trong 3 trường hợp ứng với từng cấp độ: “Thấp, trung bình, cao” là 25, 70, 105 rad/s. Tốc độ càng cao thì vị trí mong muốn là 400 rad càng nhanh đạt được. rong cả 3 cấp tốc độ T chúng ta có thể thấy rằng hệ bậc 2 và bậc 4 ổn định, xác lập nhanh chóng, dao động bé, hệ bậc 1 do khơng có vòng điều khiển vận tốc nên khiến cho tốc độ dao động rất nhiều và đáp ứng chậm hơn so với hệ bậc 2 và bậc 4 Nhưng chung quy. lại đáp ứng về vị trí và vận tốc của cả 3 hệ đều bám sát được tín hiệu cài đặt đầu vào và vẫn đảm bảo được chạy đúng
- Đối với tải N = 4 và N = <small>L L </small> 7 chúng ta có thể thấy được khơng có sự khác biệt đối với 3 cấp tốc độ: “Thấp, trung bình, cao”. Rõ ràng thơng số của động cơ có thể đáp ứng được trong trường hợp 3 ≤ N<small>L</small>≤ 10 . Thỏa mãn cơ sở lý thuyết mà chúng ta đã được học.
</div><span class="text_page_counter">Trang 20</span><div class="page_container" data-page="20">19
Question 2: Write the PID algorithm using m-file of Matlab to simulate to velocity and position control of the motor. The algorithm has to include the derivative filter for D-term and anti-windup for I-term. Illustrate the effect of anti-windup in your results ?
<b>Bảng thông số cần thiết cho câu 2 </b>
- Chọn input speed mô phỏng trong simulink là 200 rad/s và input position là 400 rad
<b>*Tính tốn các thông số cần thiết: </b>
- Hệ số K của hàm truyền động cơ DC servo:
</div><span class="text_page_counter">Trang 21</span><div class="page_container" data-page="21">20
<b>1. Điều khiển vận tốc: </b>
<b>*Sơ đồ khối mô phỏng trong matlab simulink: </b>
<b>*Khối DC servo motor: </b>
<b>*Khối Desired Speed: </b>
<b>*Khối Disturbance: </b>
</div><span class="text_page_counter">Trang 22</span><div class="page_container" data-page="22">21
<b>*Kết quả mô phỏng: </b>
<b>*Chương trình điều khiển: </b>
</div><span class="text_page_counter">Trang 23</span><div class="page_container" data-page="23">yd_f = (1 - alpha)*yd_fp + alpha*yd; ek_reset = Ki*ek + Kb*e_sat;
</div><span class="text_page_counter">Trang 24</span><div class="page_container" data-page="24">23
<b>2. Điều khiển vị trí: </b>
*<b>Chọ</b>n thông s b <b>ố ộ điề</b>u khi n PID cho vi<b>ểệc điều khiể</b>n v í: <b>ị tr</b>
- Ở đây nhóm em ã th nhiđ ử ều tr ng h p vườ ợ à đã ch n rọ a được nh ng thông s phù h p cho viữ ố ợ ệc điều khi n vị í ể tr áp ứng nhanh, không v t l : đ ọ ố
+ K = 2 <small>p</small>
+ K 10 <small>i </small>= + K = 0 <small>d</small>
<b>*Sơ đồ khối mô phỏng trong matlab simulink: </b>
<b>*Khối DC servo motor: </b>
<b>*Khối Desired Position: </b>
</div><span class="text_page_counter">Trang 25</span><div class="page_container" data-page="25">24
<b>*Khối Disturbance: </b>
<b>*Kết quả mơ phỏng: </b>
<b>*Chương trình điều khiển: </b>
</div><span class="text_page_counter">Trang 26</span><div class="page_container" data-page="26">yd_f = (1 - alpha)*yd_fp + alpha*yd; ek_reset = Ki*ek + Kb*e_sat;
</div><span class="text_page_counter">Trang 27</span><div class="page_container" data-page="27">26 3. Nh n xét: <b>ậ</b>
- Từ đồ thị đáp ứng ngõ ra của điều khiển vận tốc chúng ta có thể dễ dàng thấy được việc sử dụng bộ điều khiển PID và Anti windup đã giúp cho hệ thống đáp ứng tốt vận tốc đã định trước -là 200 rad/s. Đồ thị bám sát theo tín hiệu ngõ vào, khơng vọt lố, thời gian xác lập nhỏ, khi có nhiễu tác động, động cơ có thể nhanh chóng ổn định lại vận tốc đã đặt ra.
- Từ đồ thị đáp ứng ngõ ra của điều khiển vị trí chúng ta có thể dễ dàng thấy được ệc sử dụng vi bộ điều khiển PID và Anti-windup ã giúp cho hđ ệ thống đáp ứng tốt v rị t í đã định trước là 400 rad. Đồ thị bám sát theo tín hiệu ngõ vào, khơng vọt lố, thời gian xác lập không áng k . đ ể
</div>