Nghiên cứu thiết kế hệ thống tự động kiểm soát hàm lượng sản phẩm dầu mỏ trong nước thải lacanh tàu cá, chương 8 pdf
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (143.98 KB, 5 trang )
Chương 8:
Độ lớn của tín hiệu vào
Độ lớn của tín hiệu vào là giá trò lớn nhất của tín hiệu đặt
vào bộ cảm biến mà sai số không vượt quá ngưỡng cho phép.
Đối với các bộ cảm biến có đáp ứng phi tuyến ngưỡng động của
kích thích thường được biểu diễn bằng dexibel, bằng logarit của
tỷ số công suất hoặc điện áp của tín hiệu ra và tín hiệu vào:
1
2
1
2
lg20lg101
u
u
P
P
dB
2.3.4. Sai số và độ chính xác
Các bộ cảm biến cũng giống như là các dụng cụ đo lường
khác, ngoài đại lượng cần đo còn chòu tác động của nhiều đại
lượng vật lý khác gây nên sai số giữa giá trò đo được và giá trò
đo và giá trò thực x, sai số tương đối của bộ cảm biến được tính
bằng:
100.%
x
x
x là sai số tuyệt đối.
Khi đánh giá sai số của cảm biến ta thường phân chúng
thành hai loại: sai số hệ thống và sai số ngẫu nhiên.
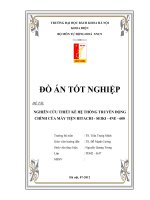
Hình 2.7. Xác đònh sai số và hàm truyền của bộ cảm biến
Sai số hệ thống là sai số không phụ thuộc vào số lần đo, có
giá trò không đổi hoặc thay đổi chậm theo thời gian đo và thêm
vào một độ lệch không đổi giữa giá trò thực và giá trò đo được.
Sai số hệ thống thường do sự thiếu hiểu biết về hệ đo, do điều
kiện sử dụng không tốt.
Các nguyên nhân gây ra sai số hệ thống có thể là:
Do nguyên lý của cảm biến
Giá trò đại lượng chuẩn không đúng,
Do đặc tính của bộ cảm biến,
y
y'
100%
Kích thích x
Đường cong hàm
truyền thực tế
Hàm truyền lý
tưởng
Đường giới hạn
chính xác
100%
Đáp ứng y
Do điều kiện và chế độ sử dụng.
Sai số ngẫu nhiên là sai số xuất hiện có độ lớn và chiều
không xác đònh. Có thể dự đoán được một số nguyên nhân của
sai số ngẫu nhiên nhưng không thể dự đoán độ lớn và dấu của
nó. Những nguyên nhân gây sai số ngẫu nhiên có thể là:
Do sự thay đổi đặc tính của thiết bò,
Do tín hiệu nhiễu ngẫu nhiên,
Do các đại lượng ảnh hưởng như các thông số môi trường
(nhiệt độ, độ ẩm, điện từ trường, độ rung….) không được tính đến
trong khi chuẩn cảm biến. Có thể giảm thiểu sai số ngẫu nhiên
bằng số biện pháp thực nghiệm thích hợp như bảo vệ các mạch
đo tránh ảnh hưởng của nhiễu, tự động điều chỉnh điện áp nguồn
nuôi, bù các ảnh hưởng nhiệt độ, tần số, vận hành sử dụng đúng
chế độ.
2.3.5. Chuẩn bộ cảm biến
Chuẩn bộ cảm biến nhằm xác đònh dưới dạng đồ thò, giải
tích mối liên hệ giữa đáp ứng và kích thích của bộ cảm biến có
tính đến tất cả các yếu tố ảnh hưởng.
Các thông số ảnh hưởng có thể là các đại lượng vật lý liên
quan đến đáp ứng như độ lớn, chiều và tốc độ biến thiên của các
kích thích. Ngoài ra chúng cũng có thể là các đại lượng vật lý
không liên quan đến kích thích nhưng tác động đến bộ cảm biến
khi sử dụng và làm thay đổi hồi đáp. Thông thường các đại
lượng vật lý này là các thông số môi trường như nhiệt độ, áp
suất, độ ẩm… và các thông số của nguồn như biên độ, tần số,
điện áp làm việc của bộ cảm biến.
2.3.6. Độ tuyến tính của cảm biến
Bộ cảm biến được gọi là tuyến tính trong dải kích thích
nếu trong dải đó độ nhạy không phụ thuộc vào giá trò của kích
thích tức là độ nhạy là một hằng số.
Trong chế độ tónh, độ tuyến tính thể hiện bằng các đoạn
thẳng trên đặc tuyến tính và hoạt động của bộ cảm biến là tuyến
tính khi các kích thích tác động còn nằm trong vùng này.
Trong chế độ động, độ tuyến tính bao gồm sự không đổi
của độ nhạy tónh, đồng thời các thông số quyết đònh hồi đáp như
tần số dao động riêng, hệ số suy giảm cũng không phụ thuộc
vào kích thích.
2.3.7. Nhiễu trong bộ cảm biến và mạch
Nhiễu trong bộ cảm biến và mạch là nguồn gốc của sai số
mà ta phải tìm các biện pháp khắc phục. Giống như bệnh tật
nhiễu không thể loại trừ hoàn toàn mà chỉ có thể phòng ngừa,
làm giảm ảnh hưởng của chúng và việc khắc phục nhiễu đòi hỏi
nhiều biện pháp tổng hợp. Ta có thể phân nhiễu làm hai loại:
nhiễu nội bộ và nhiễu tác động trên mạch truyễn dẫn tín hiệu.
Nhiễu nội tại phát sinh do sự không hoàn thiện trong việc
thiết kế, công nghệ chế tạo, tính chất vật liệu của bộ cảm biến…,
do đó đáp ứng có thể bò méo so với dạng lý tưởng. Sự méo của
tín hiệu ra có thể có tính hệ thống hoặc ngẫu nhiên. Dạng tín
hiệu ra liên quan chặt chẽ đến hàm truyền, đặc tính tuyến tính
và đặc tính động của cảm biến.
Từ bộ cảm biến đến tín hiệu được khuếch đại và chuyển
đổi thành dạng số không biểu thò bằng độ lớn và đặc tính phổ
mà theo độ phân giải số.
Điện áp lệch đầu vào và dòng điện phân cực có thể bò trôi. Tín
hiệu nhiễu (điện áp và dòng điện) do cơ chế vật lý xảy ra trong
các điện trở và tranzito sử dụng để chế tạo mạch.