Giáo trình phân tích quy trình nghiên cứu phần mềm ứng dụng lập trình chăm sóc cây trồng p10 ppsx
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (330.7 KB, 9 trang )
Đồ án tốt nghiệp Nguyễn Thái Học - Lớp TĐH 46
Khoa Cơ Điện Trờng ĐHNN I - H Nội
- 100 -
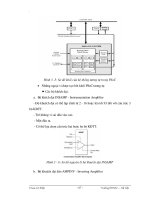
Module Timer: Là bộ định thời độ rộng 16 bit
dùng để tạo ra chu kỳ trích mẫu.
Clock: VC3 Đầu vào xung nhịp là VC3
Capture: High Chế độ băt điểm luôn ở trạng thái
cao
TerminalCountOut: None Đầu ra giá trị đếm cuối
là khoá
CompareOut: None Đầu ra so sánh là khoá.
Period: 249 Giá trị đặt trớc là 249.
CompareValue: 0 Giá trị so sánh là 0.
CompareType: Less Than Or Equal Kiểu so sánh
là nhỏ hơn hoặc bằng.
InterruptType: Terminal Count Kiểu sinh ngắt là
giá trị đếm cuối.
ClockSync: Sync to SynCK Đồng bộ xung nhịp
với xung nhịp của hệ thống.
TC_PulseWidth: Full Clock Lựa chọn độ rộng
xung đầu ra của giá trị đếm cuối là đủ một xung
nhịp.
IterruptAPI: Enable Mở ngắt cho lập trình ứng
dụng.
InvertEnable : Nomal Cho phép đầu ra đảo.
Clock: VC2 Đầu vào xung nhịp là VC2.
RX Input: Row_2_Input_1 Khai báo đầu vào
nhận dữ liệu là Row_2_Input_1.
TX Output: Row2_Output_1 Khai báo đầu ra
dữ liệu là Row2_Output_1
TX Interrupt Mode: TXComplete Ngắt xảy ra
khi truyền xong dữ liệu.
RxCmBuffer: 16 bytes Dung lợng bộ đệm
nhận là 16 bytes.
Command Terminator: 13 Ký tự kết thúc
lệnh.
Param_Delimiter: 32 Ký tự giới hạn lệnh.
IgnoreCharsBelow: 32 Bỏ qua ký tự nhỏ hơn
32.
InterruptAPI: Enable mở ngắt cho lập trình
ứng dụng.
.
Đồ án tốt nghiệp Nguyễn Thái Học - Lớp TĐH 46
Khoa Cơ Điện Trờng ĐHNN I - H Nội
- 101 -
4.7. Kết quả thử nghiệm mô hình
Sau khi thiết kế phần cứng ta tiến hành chạy thực nghiệm mô hình theo
các chơng trình điều khiển với các bộ điều khiển khác nhau ta thu đợc kết quả:
a). Bộ thông số thực nghiệm khi thiết kế hệ thống đờng ống
Trên cơ sở kết quả thu đợc trên các bảng 2 - 3, 2 - 4, 2 - 5 ta nhận thấy
mặc dù các vòi phun có cùng đờng kính lỗ vòi phun có kết cấu tơng tự thì ta
thấy với góc của vòi phun so với phơng quỹ đạo chuyển động của dòng tia
phun. = 64 thì chịu ảnh hởng bởi gió là ít nhất và có bán kính phun xa
nhất do đó các thông số kỹ thuật tối u đợc lấy theo trờng hợp này.
Bảng 2 - 3 Kết quả thử nghiệm vòi phun với các thông số kỹ thuật:
( d= 4mm, = 60, = 5)
Thông số
Số TT
áp lực ở đầu vòi
phun P
(Kg/cm
2
)
Bỏn kớnh tia
phun R
(m)
Chiều cao tia
phun H
(mH
2
0)
Lu lợng nớc
qua vòi phun
(l/ph)
1 1,1 5,20 2,22 17,2
2 1,4 5,80 2,34 16,5
3 1,8 5,95 2,55 15,95
4 2,2 6,2 2,60 14,37
5 2,4 6,48 2,70 12,41
6 2,6 6,62 2,80 11,27
7 2,8 6,90 2,90 10,1
.
Đồ án tốt nghiệp Nguyễn Thái Học - Lớp TĐH 46
Khoa Cơ Điện Trờng ĐHNN I - H Nội
- 102 -
Bảng 2 - 4 Kết quả thử nghiệm vòi phun với các thông số kỹ thuật:
( d= 4mm, = 64, = 5)
Thông số
Số TT
áp lực ở đầu vòi
phun P
(Kg/cm
2
)
Bán kính tia
phun R
(m)
Chiều cao tia
phun H
(mH
2
0)
Lu lợng nớc
qua vòi phun
(l/ph)
1 1,1 5,40 2,43 17,5
2 1,3 5,47 2,50 16,7
3 1,6 5,91 2,63 15,9
4 1,8 6,12 2,72 15,2
5 2,2 6,43 2,80 14,1
6 2,5 6,72 2,90 12,3
7 2,7 7,00 3,01 11,0
Bảng 2 - 5 Kết quả thử nghiệm vòi phun với các thông số kỹ thuật:
( d= 4mm, = 68, = 5)
Thông số
Số TT
áp lực ở đầu
vòi phun P
(Kg/cm
2
)
Bán kính tia
phun R
(m)
Chiều cao tia
phun H
(mH
2
0)
Lu lợng nớc
qua vòi phun
(l/ph)
1 1,10 5,10 2,33 17,6
2 1,30 5,35 2,45 16,8
3 1,65 5,65 2,66 16,2
4 2,00 5,90 2,71 15,7
5 2,20 6,26 2,79 14,85
6 2,40 6,50 2,85 13,2
7 2,60 6,80 2,90 12,1
.
Đồ án tốt nghiệp Nguyễn Thái Học - Lớp TĐH 46
Khoa Cơ Điện Trờng ĐHNN I - H Nội
- 103 -
b). Kết quả thực nghiệm khi chạy mô hình
- Luật điều chỉnh PID với các tham số lựa chọn Kp = 1.5, Ti = 5, Td = 0.1;
Stt
Nhiệt độ (
C)
Độ ẩm (%) áp suất (at) Thời gian (s)
1 25.7 85 1.2 360
2 26.2 78 1.2 382
3 26.8 65 1.3 390
4 27.1 58 1.2 410
5 28.0 59 1.25 420
6 28.3 55 1.3 425
7 28.8 48 1.2 456
8 29.4 43 1.2 467
9 29.8 40 1.2 489
4.8. Kết luận chơng IV
Thông qua chơng 4 ta tiến hành thực nghiệm làm mạch điều khiển
thông qua điều kiện và yêu cầu bài toán đã đặt ra ở các chơng trớc.
Mạch thiết kế ra đơn giản và dễ sử dụng với nhiều tính năng lựa chọn
thông qua việc nhập tham số qua bàn phím và từ các cảm biến và đã đợc
kiểm nghiệm thực tế là chạy tốt.
Từ đó tiến hành thiết lập thuật toán điều khiển và lập trình các ứng dụng
theo yêu cầu bài toán.
Hạn chế trong quá trình thiết kế mạch điều khiển là do điều kiện không
cho phép cho nên không thiết kế đợc các cảm biến độ ẩm, cảm biến áp suất và
cảm biến bức xạ năng lợng mặt trời mà thay vào đó là ta đa tín hiệu tơng tự
vào cho nên nó không phản ánh đợc các trạng thái điều khiển thực tế.
.
Đồ án tốt nghiệp Nguyễn Thái Học - Lớp TĐH 46
Khoa Cơ Điện Trờng ĐHNN I - H Nội
- 104 -
Kết luận và đề nghị
1. Kết luận
Sau một thời gian nghiên cứu đề tài, mặc dù gặp nhiều khó khăn nhng
với nỗ lực của bản thân cùng với sự hớng dẫn tận tình của thầy giáo ThS.
Ngô Trí Dơng các Thầy Cô trong Khoa Cơ Điện và các phòng ban chức năng
cùng toàn thể các bạn đồng nghiệp đến nay đề tài tốt nghiệp của tôi đã cơ bản
hoàn thành. Từ kết quả nghiên cứu dợc trong đề tài "Nghiên cứu thiết kế mô
hình điều khiển tới phun ma phục vụ sản xuất rau an toàn". Chúng tôi
đa ra một số kết luận và đề nghị sau:
Mặt tích cực
- Đề tài đã nêu đợc quá trình phát triển của ngành tự động hoá quá
trình sản xuất trong nớc cũng nh trên thế giới, phân tích vai trò, ý nghĩa ứng
dụng cũng nh hạn chế của nó trong sản xuất.
- Nghiên cứu về thiết bị phần cứng của chip vi xử lý trên công nghệ
PSoC và các linh kiện điện tử phụ trợ để tiến hành thiết kế mạch điều khiển.
- Nghiên cứu phần mềm PSoC Deisigner Version 4.2 và tiến hành thiết
kế, lập trình điều khiển hệ thống với sơ đồ công nghệ thực tiễn.
- Xây dựng mô hình thực, chạy thử kiểm nghiệm lại lý thuyết.
Mặt hạn chế
- Do còn hạn chế về khả năng cũng nh về mặt tài chính nên các cảm
biến áp suất, cảm biến độ ẩm và cảm biến bức xạ vẫn cha làm thực mà phải
dùng tín hiệu tơng tự thay thế cho nên kết quả kiểm nghiệm vẫn cha phản
ánh chính xác độ biến thiên của hệ thống thực.
Mặt nhận thức
- Qua quá trình nghiên cứu, tìm hiểu các tài liệu để thực hiện đề tài
ngoài những hiểu biết vô cung quan trọng về sự phát triển của công nghệ tự
động hoá, việc ứng dụng của tự động hoá vào sản xuất Đề tài còn giúp tôi
.
Đồ án tốt nghiệp Nguyễn Thái Học - Lớp TĐH 46
Khoa Cơ Điện Trờng ĐHNN I - H Nội
- 105 -
tiếp cận với những kiến thức về điều khiển vi xử lý và các phần mềm lập trình
đang đợc ứng dụng rộng rãi trong các hệ thống điều khiển tự động hiện nay
nh: Visual Basic, Multisim, Matlab, Orcad.
- Hơn thế nữa đề tài còn giúp tôi có thêm kiến thức thực tế về áp dụng
tự động hoá trong nông nghiệp một lĩnh vực vô cùng quan trọng và cũng là
nhiệm vụ của một kỹ s tự động hoá nông nghiệp.
2. Đề nghị
Trong quá trình thiết kế mô hình điều khiển do thời gian, điều kiện kinh tế và
nhận thức còn hạn chế nên việc tìm hiểu xây dựng mô hình, viết chơng trình điều
khiển cha hợp lý, các thông số còn sai số lớn. Kính mong bộ môn cùng khoa Cơ
Điện tạo điều kiện tốt hơn nữa về thời gian cũng nh thiết bị để đề tài có thể hoàn
thành tốt hơn và có tính ứng dụng thực tế cao.
.
Đồ án tốt nghiệp Nguyễn Thái Học - Lớp TĐH 46
Khoa Cơ Điện Trờng ĐHNN I - H Nội
- 106 -
Mục lục
Mở đầu - 1 -
1. Đặt vấn đề - 1 -
2. Mục đích của đề tài - 3 -
3. Nội dung đề tài - 3 -
4. Phơng pháp nghiên cứu - 3 -
Chơng 1:
Tổng quan - 5 -
1.1. Tình hình sản xuất rau sạch trong nớc và trên thế giới - 5 -
1.1.1. Khái niệm rau sạch - 5 -
1.1.2. Tình hình sản xuất rau sạch trong nớc - 6 -
1.1.3. Tình hình sản xuất rau sạch trên thế giới - 9 -
1.2. Các phơng pháp tới - 9 -
1.2.1. Phơng pháp tới - 9 -
1.2.2. Lựa chọn phơng pháp tới - 14 -
1.3. Vai trò của tự động hoá trong quá trình sản xuất - 17 -
1.4. ứng dụng của tự động hoá trong nông nghiệp - 18 -
1.5. Mục đích và ý nghĩa việc thiết kế mô hình tới phun ma - 18 -
1.6. Kết luận chơng I - 19 -
Chơng 2:
Nghên cứu tính toán các thông số kỹ thuật của hệ
thống t-ới phun m-a trồng rau sạch
- 20 -
2.1. Chế độ tới nớc cho rau sạch - 20 -
2.1.1. Đất, nớc và cây trồng - 20 -
2.1.2. Tính toán mức tới - 20 -
2.2. Bố trí sơ đồ hệ thống tới phun ma và các thông số kỹ thuật - 22 -
2.2.1. Cờng độ phun ma - 22 -
2.2.2. Kích thớc hạt ma - 23 -
2.2.3. Độ đồng đều khi tới - 24 -
2.2.4. Năng suất tới phun ma - 25 -
2.2.5. Tầm xa lý thuyết của dòng tia - 26 -
.
Đồ án tốt nghiệp Nguyễn Thái Học - Lớp TĐH 46
Khoa Cơ Điện Trờng ĐHNN I - H Nội
- 107 -
2.2.6 Phân loại, lựa chọn vòi phun và đờng ống phục vụ sản xuất rau an toàn
30 -
2.2.7. Các thông số cơ bản lựa chọn máy bơm - 36 -
2.3. Thiết kế hệ thống tới phun ma - 38 -
2.4. Kết quả thực nghiệm - 43 -
2.5. Thiết kế giao diện - 49 -
2.5.1. Phần mềm thiết kế giao diện - 49 -
2.6. Kết luận chơng II - 52 -
Chơng 3:
Nghiên cứu phần cứng và phần mềm của chip vi xử
lý trên công nghệ pSOc của hãng cypress
- 53 -
3.1. Lựa chọn thiết bị điều khiển - 53 -
3.2. Tổng quan cấu trúc và tính năng của PSoC - 54 -
3.3 Tìm hiểu cấu trúc phần cứng chip PSoC - 56 -
3.4. Phần mềm phát triển PSoC Designer 4.2 - 73 -
3.4.1. Cấu trúc của PSoC Designer - 73 -
3.4.2. Các kiểu file và đuôi mở rộng - 74 -
3.4.3. Tạo một dự án trong PSoC Deisigner - 74 -
3.4.4. Trình soạn thảo cấu hình chip - Device Editor - 76 -
3.4.5. Trình soạn thảo ứng dụng - Application Editor - 79 -
3.5. Bộ điều khiển PID số - 79 -
3.5.1. Thiết kế luật điều khiển PID số - 79 -
3.5.2. Tổng hợp hệ thống điều khiển - 87 -
3.6 Kết luận chơng III - 87 -
Chơng 4:
Thiết kế và thi công bộ điều khiển hệ thống
t-ới phun m-a trên công nghệ PSoC
- 88 -
4.1. Sơ đồ khối của bộ điều khiển - 88 -
4.2. Phân công tín hiệu điều khiển - 89 -
4.3. Thuật toán điều khiển - 89 -
4.4.Thuyết minh sơ đồ - 93 -
4.5. Lựa chọn thiết bị - 93 -
.
Đồ án tốt nghiệp Nguyễn Thái Học - Lớp TĐH 46
Khoa Cơ Điện Trờng ĐHNN I - H Nội
- 108 -
4.6.Cấu hình cho các User Module của chip CY8C27443 - 98 -
4.7. Kết quả thử nghiệm mô hình - 101 -
4.8. Kết luận chơng IV - 103 -
Kết luận và đề nghị - 104 -
1. Kết luận - 104 -
2. Đề nghị
- 105 -
.