Giáo trình phân tích quy trình nghiên cứu phần mềm ứng dụng lập trình chăm sóc cây trồng p8 doc
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (558.72 KB, 11 trang )
Đồ án tốt nghiệp Nguyễn Thái Học - Lớp TĐH 46
Khoa Cơ Điện Trờng ĐHNN I - H Nội
- 78 -
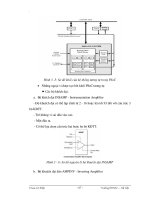
Khi thiết lập thông số cho chip ta phải căn cứ vào tính năng của chip mà
bạn đang dùng và yêu cầu điều khiển mà điền thông số vào cột Value của
Global Resource
Hình 3-18: Cửa sổ kết nối chân và thông số cho chip.
4. Kết nối các User Module
Việc kết nối các User Module đợc thực hiện thông qua các đầu vào ra
của các khối chức năng nắm giữ các User Module và thông qua một đờng
bus chung.
5. Xuất thiết kế thành file
Khi cấu hình xong ta tiến hành xuất thiết kế thành file bằng cách:
- Chọn Menu Config>>Export Design.
- Trong trờng Designed Name điền tên của file định xuất ra.
- Trong trờng Description điền thông tin miêu tả về thiết kế.
- Trong trờng Version điền phiên bản của thiết kế.
.
Đồ án tốt nghiệp Nguyễn Thái Học - Lớp TĐH 46
Khoa Cơ Điện Trờng ĐHNN I - H Nội
- 79 -
Sau đó nhấn OK là bạn đã hoàn tất việc cấu hình chip.
3.4.5. Trình soạn thảo ứng dụng - Application Editor
Để vào trình soạn thảo(Viết code gọi lệnh điều khiển các khối chức năng)
ta nhấn nút
. Sau đó bạn nhấn vào Source files kích đúp vào main.c để viết
lệnh sau dòng // Insert your main routine code here.
Hình 3-19: Cửa sổ lập chơng trình
Sau khi viết code xong ta nhấn F7 để dịch chơng trình. Nếu không có lỗi
thì ta tiến hành dịch chơng trình sang file.hex để phục vụ cho việc nạp chip.
Ta vào menu Program>>Write Hex file. Sau đó đặt tên file, định vị file và
nhấn OK là ta đã có file.hex.
3.5. Bộ điều khiển PID số
3.5.1. Thiết kế luật điều khiển PID số
1. Luật điều khiển tỷ lệ : Proportional (P)
.
Đồ án tốt nghiệp Nguyễn Thái Học - Lớp TĐH 46
Khoa Cơ Điện Trờng ĐHNN I - H Nội
- 80 -
Hình 3 - 20 : Hệ kín với luật điều khiển tỷ lệ
r(t): Tín hiệu đầu vào của hệ thống.
y(t): Tín hiệu đầu ra của hệ thống.
u(t): Tín hiệu điều khiển tác động lên đối tợng.
e(t): Tín hiệu sai lệch điều khiển.
Khi đó sai lệch e(t) = r(t) - y(t) là đầu vào của bộ điều khiển và u(t) là đầu
ra của bộ điều khiển thì quan hệ giữa đầu vào và đầu ra của luật điều khiển
đợc biểu diễn theo phơng trình sau.
u(t) = k
P
.e(t) (3 - 1)
Trong đó K
P
là tham số của luật điều khiển. Hỗn hợp các đối tợng công
nghiệp đều đợc điều khiển theo luật này. Bởi luật điều khiển tơng đối đơn
giản nhng lại có thể thay đổi cả chất lợng động và chất lợng tĩnh của hệ
thống. Khi ta thay đổi giá trị k
P
dẫn đến sự thay đổi hệ số khuyếch đại của hệ
hở, điều đó dẫn đến sự thay đổi vị trí của điểm cực và điểm không của hệ. Khi
k
P
thay đổi cũng làm chất lợng của hệ thống ở chế độ xác lập thay đổi:
=)(t
lim
t
s.E(s) =
lim
t
)(.1
)(.
swK
sRs
dtP
+
(3 - 2)
1. Luật điều khiển tích phân: Integral(I)
u(t)
Kp
e(t)
r(t)
_
Đối tợng
điều khiển
y(t)
u(t)
9
u(t)
sT
I
.
1
e(t)
r(t)
_
Đối tợng
điều khiển
y(t)
u(t)
9
.
Đồ án tốt nghiệp Nguyễn Thái Học - Lớp TĐH 46
Khoa Cơ Điện Trờng ĐHNN I - H Nội
- 81 -
Hình 3 - 21: Hệ kín với luật điều khiển tích phân
Với tín hệu đầu vào của bộ điều khiển là sai lệch e(t) và tín hiệu đầu ra
u(t) ta có thể biểu diễn luật điều khiển tích phân bằng phơng trình sau:
u(t) =
t
I
de
T
0
).(
1
(3 - 3)
hoặc u(t) = k
I
t
de
0
).(
(3 - 4)
Tham số của luật điều khiển là T
I
đợc gọi là hằng số thời gian tích
phân hay K
I
là hệ số tích phân. Khi sử dụng luật điều khiển tích phân độ dự
trữ ổn định của hệ kín sẽ giảm đi, theo tiêu chuẩn ổn định của Nyquist sai
lệch tĩnh sẽ giảm vì hàm truyền của hệ hở lúc đó là:
w
0
= w
DK
(s) - w
dt
=
sT
I
1
w
dt
(s) (3 - 5)
và sai lệch của hệ là:
=)(t
lim
t
)(
1
1
)(.
swsT
sRs
dtI
+
=
lim
t
)(
).(.
2
swT
ssRT
dtI
I
+
(3 - 6)
Điều khiển tích phân hay còn gọi là phơng pháp điều khiển theo tích
luỹ sai lệch điều khiển chậm sau. Phơng pháp điều khiển này có u điểm
là ít chịu ảnh hởng của nhiễu và làm tăng độ chính xác của hệ hở ở chế độ
xác lập.
3. Luật điều khiển vi phân : Derivative(D)
Hình 3 - 22:Hệ kín với luật điều khiển vi phân
Luật vi phân đợc biểu diễn theo phơng trình sau:
u(t)
T
D
S
e(t)
r(t)
_
Đối tợng
điều khiển
y(t)
u(t)
9
.
Đồ án tốt nghiệp Nguyễn Thái Học - Lớp TĐH 46
Khoa Cơ Điện Trờng ĐHNN I - H Nội
- 82 -
u(t) = T
D
dt
tde
)(
(3 - 7)
Trong đó T
D
là hằng số thời gian vi phân. Luật điều khiển vi phân có
tác dụng làm giảm thời gian quá độ của hệ. Do đó ngời ta gọi đây là luật
điều khiển vợt trớc. Quyết định điều khiển đợc đa ra trên cơ sở đạo
hàm của sai lệch. Nhợc điểm của luật này là ở phơng pháp lấy thông tin
này vì nếu đối tợng chịu ảnh hởng của nhiễu biến thiên thì luật sẽ ra
quyết định theo nhiễu do đó luật điều khiển với các đối tợng có nhiễu là
hằng số hoặc ít bị nhiễu.
4. Luật điều khiển PID
Đây là bộ điều khiển tích hợp của ba luật điều khiển trên vì thế nó sẽ
tích luỹ đợc tất cả điểm mạnh của các luật trên và khắc phục những hạn chế
của từng luật cụ thể.
Thành phần khuyếch đại (P) có tốc xử lý tín hiệu nhanh, có độ ổn
định cao, thời gian điều khiển ngắn. Nhng hạn chế của quy luật này
là khi hệ thống ở trạng thái xác lập luôn tồn tại sai lệch tĩnh.
Thành phần tích phân (I) có u điểm là triệt tiêu đợc sai lệch tĩnh
nhng tốc độ xử lý tín hiệu còn chậm.
Thành phần vi phân (D) có tác dụng làm tăng nhanh tốc độ tác động
của tín hiệu điều khiển nhng bên cạnh đó luật điều khiển này có độ
quá điều chỉnh lớn.
Sơ đồ cấu trúc của luật điều khiển:
.
Đồ án tốt nghiệp Nguyễn Thái Học - Lớp TĐH 46
Khoa Cơ Điện Trờng ĐHNN I - H Nội
- 83 -
Hình 3 - 22: Hệ kín với luật điều khiển PID.
Luật điều khiển PID đã đa sai lệch e(t) của hệ thống về 0 sao cho quá
trình quá độ thoả mãn các yêu cầu cơ bản về chất lợng:
Nếu sai lệch e(t) càng lớn thì thông qua thành phần tỷ lệ, tín hiệu
điều chỉnh u(t) càng lớn( Vai trò khuyếch đại).
Nếu sai lệch e(t) cha bằng 0 thì thông qua thành phần tích phân, bộ
điều khiển PID vẫn còn tín hiệu điều chỉnh(vai trò của bộ tích phân).
Nếu có sự thay đổi của sai lệch e(t) càng lớn thì thông qua thành
phần vi phân phản ứng thích hợp của tín hiệu điều chỉnh u(t) sẽ càng
nhanh(vai trò của vi phân).
Luật điều khiển PID đợc biểu diễn bằng phơng trình sau:
U(t)= k
P
[ e(t) +
t
I
de
T
0
)(
1
T
D
.e(t)] (3 - 8)
Trong đó e(t) là tín hiệu đầu vào, u(t) là tín hiệu đầu ra k
P
đợc gọi là hệ
số khuếch đại, T
I
là hằng số thời gian tích phân và T
D
là hằng số thời gian vi
phân. Chất lợng của hệ thống phụ thuộc vào các tham số k
P
, T
I
, T
D
. Muốn hệ
thống làm việc ổn định thì ta phải chọn các bộ tham số trên sao cho phù hợp.
Hàm truyền của luật điều khiển PID đợc biểu diễn dới dạng cộng có dạng
nh sau:
W
PID
+
(s) = k
P
[1+
sT
I
.
1
+T
D
.s] (3 - 9)
Hoặc dới dạng nhân nh sau:
W
PID
(s) =
sT
sTsTk
I
DIP
.
).1)(.1(
*
***
++
(3 - 10)
Trong đó: k
P
=
I
DIP
T
TTk
*
***
)1)(1( ++
(3 - 11)
T
I
= T
I
*
+ T
D
*
(3- 12)
T
D
=
**
**
.
D
I
DI
TT
TT
+
(3 - 13)
.
Đồ án tốt nghiệp Nguyễn Thái Học - Lớp TĐH 46
Khoa Cơ Điện Trờng ĐHNN I - H Nội
- 84 -
5. Thiết kế luật điều khiển PID số.
Yêu cầu của thiết kế đợc dặt ra là bộ PID số phải có tính linh
hoạt cao, có giao diện thân thiện, ngời sử dụng có thể dễ dàng lựa chọn ra bộ
PID phù hợp với đối tợng điều khiển của mình, thời gian xử lý nhanh để làm
tăng tính thời gian thực cho thiết bị điều khiển.
a). Luật điều khiển tỷ lệ số
Đây là luật điều khiển đơn giản trong đó dãy u(k) đợc tính từ dãy e(k)
theo công thức:
u(k) = k
P
e(k) k = 0, 1, 2, (3 - 14)
b). Luật điều khiển tích phân số
Từ công thức số 3 ta có phơng trình sai phân:
u(k) =
I
T
T
e(k) + u(k-1) (3 - 15)
Trong đó T là thời gian trích mẫu (Sample Time)
c.) Luật điều khiển vi phân số
K
p
e(t) u(k)
H
ình 3
23 Cấu trúc luật P số
u
(
k-1
)
e(k)
T
/
Ti
H
ình 3
24 Cấu trúc luật I số
+
+
D
u(k)
e(k)
e
(k
-1
)
u(k)
T
D
/T
H
ình 3
25 Cấu trúc luật D số
+
-
D
.
Đồ án tốt nghiệp Nguyễn Thái Học - Lớp TĐH 46
Khoa Cơ Điện Trờng ĐHNN I - H Nội
- 85 -
Thờng các bộ điều khiển theo luật vi phân số đợc cài đặt theo các
phơng trình sai phân sau:
u(k) =
D
T
T
[e(k) + u(k-1)] (3 - 16)
d). Luật điều khiển PID số
Từ cấu trúc PID số trên ta có:
{
[]
}
() () ( 1) () ( 1)
D
pI
T
uk k ek u k ek ek
T
=++ (3 - 17)
{ }
() (1 )() ( 1) () ( 1)
DD
pI
I
TT T
uk k ek ek ek u k
TT T
=+ ++
(3 - 18)
{ }
() (1 )() ( 1) ( 1)
DD
pI
I
TTT
uk k ek ek u k
TT T
=++ + (3 - 19)
Luật điều khiển PID số trong công thức trên đợc lựa chọn để cài đặt
cho bộ điều khiển của chip trên công nghệ PsoC.
6. Cách xác định thông số của bộ PID
a). Phơng pháp Ziegler Nichol(cho PID)
Kp = 1.2
1
2
T
T
(3 - 20)
Ti = 2T1 (3 - 21)
Td = 0.5T2 (3 - 22)
.
Đồ án tốt nghiệp Nguyễn Thái Học - Lớp TĐH 46
Khoa Cơ Điện Trờng ĐHNN I - H Nội
- 86 -
Với T1 và T2 đợc xác định từ hàm truyền hở của động cơ.
Hình 3 - 27 : Đặc tính tốc độ hàm truyền hở của động cơ
b). Phơng pháp Jassen và Offerein
Thực nghiệm đợc tiến hành theo các bớc sau:
* Cho hệ thống làm việc ở biên giới ổn định
- Điều khiển đối tợng theo luật P (T ặ 0 và Ti ặ
)
- Xác định hệ số k
pth
* Cho hệ thống làm việc với luật PI
- Cho hệ làm việc với luật PI và với hệ số k
p
= 0,45 k
pth
, Ti tuỳ
chọn.
- Giảm hàm số thời gian tích phânTi cho đến khi hệ thống làm việc
ở biên giới ổn định. Xác định hằng số Ti ở chế độ này Ti = T
ith
.
* Chọn luật điều khiển PID
- Cho hệ thống làm việc theo luật PID với k
p
= k
pth
- ( đủ nhỏ),
Td và Ti tuỳ chọn.
- Tăng hằng số thời gian vi phân cho đến khi hệ thống đạt đợc
quá điều chỉnh cực đại lớn nhất
max
= max. Xác định Td max.
Chọn
TD =
3
1
TDMAX và Ti = 4,5TD.
.
Đồ án tốt nghiệp Nguyễn Thái Học - Lớp TĐH 46
Khoa Cơ Điện Trờng ĐHNN I - H Nội
- 87 -
- Giảm k
p
cho đến khi hệ thống đạt đợc đặc tính động học mong
muốn.
3.5.2. Tổng hợp hệ thống điều khiển
1. Để tổng hợp hệ thống điều khiển trớc tiên ta phải nắm đợc mô hình
toán học của hệ thống điều khiển bằng cách mô hình hoá đối tợng đó lên.
Trong thực tế có hai phơng pháp mô hình hoá:
- Phơng pháp lý thuyết.
- Phơng pháp thực nghiệm.
Phơng pháp lý thuyết là phơng pháp thiết lập mô hình dựa trên các
định luật có sẵn về quan hệ vật lý bên trong và quan hệ giao tiếp với hệ thống
bên ngoài của đối tợng. Các mối quan hệ này đợc biểu diễn bằng các
phơng trình toán hoc.
Trong trờng hợp các thông số của đối tợng không đủ đảm bảo cho
chúng ta tiến hành tổng hợp thành một hệ thống hoàn chỉnh thì chúng ta phải
áp dụng phơng pháp thực nghiệm bằng cách tiến hành thử hệ thống với một
loạt các tín hiệu đầu vào và ghi nhận các thông số đầu ra sao cho kết quả thử
nghiệm phải phù hợp với yêu cầu của phơng pháp lý thuyết đề ra.
Trong điều kiện của đề tài chúng tôi tiến hành tổng hợp hệ thống bằng
phơng pháp thực nghiệm với tín hiệu đầu vào x(t) là nhiệt độ không khí còn
tín hiệu đầu ra là thời gian vận hành máy bơm. Qua đó ta tiến hành làm mạch
và cho chạy thử với các bộ thông số PID từ đó chọn ra bộ PID phù hợp với đối
tợng điều khiển.
3.6 Kết luận chơng III
Thông qua chơng III đã lựa chọn và giới thiệu chơng trình điều khiển
chip trên công nghệ PsoC và so sánh hiệu quả, tính tiện dụng và kinh tế khi sử
dụng chip trên công nghệ PsoC với các loại chip thông thờng và các phơng
pháp điều khiển khác.Tiến hành lựa chọn thuật điều khiển hệ thống sao cho
hợp lý và hiệu quả phù hợp với từng đối tợng điều khiển.
.
§å ¸n tèt nghiÖp NguyÔn Th¸i Häc - Líp T§H 46
Khoa C¬ §iÖn Tr−êng §HNN I - Hμ Néi
- 88 -
Ch−¬ng 4
ThiÕt kÕ vµ thi c«ng bé ®iÒu khiÓn hÖ thèng
t-íi phun m-a trªn c«ng nghÖ PSoC
4.1. S¬ ®å khèi cña bé ®iÒu khiÓn
.