Bài giảng: Kỹ thuật cảm biến potx
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (4.24 MB, 185 trang )
Kỹ thuật cảm biến
TS. Nguyễn Thị Lan Hương
Bộ môn Kỹ thuật ño và Tin học Công nghiệp
2
Tài liệu tham khảo
[1] Các bộ cảm biến trong kỹ thuật ño lường và ñiều khiển,
Nhà XB Khoa học Kỹ thuật (2001), Chủ biên tập PGS.TS.
Lê Văn Doanh
[2]Cảm biến, Nhà XB Khoa học kỹ thuật (2000), Phan Quốc
Phô, Nguyễn Đức Chiến
[3] Process/Industrial Instruments and Controls Handbook,
Mc GRAW-Hill (1999), Gregory K.McMillan; Douglas M.
Considine,
3
Nội dung giảng dạy
• Khái niệm cảm biến và xu hướng phát triển
• Đặc tính kỹ thuật của cảm biến
• Các kỹ thuật cảm biến cơ bản dùng trong công nghiệp
– Nguyên lý và hiệu ứng vật lý của các chuyển ñổi sơ cấp
• Ứng dụng các chuyển ñổi sơ cấp cho việc ño các ñại
lượng vật lý- thiết bị và cảm biến ño
– Đo nhiệt ñộ
– Đo áp suất, ño lưu lượng
– Đo tải trọng
– Đo mức
– Đo tốc ñộ ñộng cơ
– Đo gia tốc chuyển ñộng
4
Chương 1. Khái niệm và các ñặc tính kỹ thuật
của cảm biến
• Sơ ñồ các cảm biến trong công nghiệp
5
Phân loại Cảm biến
• Theo nguyên lý hoạt ñộng
– Chuyển ñổi ñiện trở
– Chuyển ñổi ñiện từ
– Chuyển ñổi nhiệt ñiện
– Chuyển ñổi ñiện tử và ion
– Chuyển ñổi hóa ñiện
– Chuyển ñổi tĩnh ñiện
– Chuyển ñổi lượng tử
• Theo kích thích: quang, cơ học, âm học…
• Theo tính năng
• Theo ứng dụng
• Theo mô hình thay thế: Tích cực và thụ ñộng
6
ại lợng Thông số biến đổi Vật liệu làm cảm biến
Nhiệt độ
Nhiệt độ rất thấp
iện trở suất
Hằng số điện môi
Kim loại : platine, nickel,
đồng, chất bán dẫn
Thuỷ tinh
Biến dạng
iện trở suất
ộ từ thẩm
Hợp kim niken và silic mạ
Hợp kim sắt từ
Vị trí iện trở suất Từ trở
Từ thông của bức xạ
quang
iện trở suất Bán dẫn
ộ ẩm iện trở suất
Hằng số điện môi
Chlorure de lithium
Hợp kim polymere
Mức Hằng số điện môi Cách điện lỏng
Ví dụ về cảm biến thụ động
7
Ví dụ về cảm biến tích cực
ại lợng vật lý cần đo Hiệu ứng sử dụng Tín hiệu ra
Lực
áp suất
Gia tốc
áp điện
iện tích
Nhiệt độ Nhiệt điện iện áp
Tốc độ (vận tốc) Cm ứng điện từ iện áp
Vị trí Hiệu ứng Hall iện áp
Từ thông bức xạ quang
Hoa quang
Phát xạ quang
Hiệu ứng quang áp
Hiệu ứng quang điện từ
iện tích
Dòng điện
iện áp
iện áp
8
c ủim ca cỏc phng phỏp ủo cỏc ủi lng khụng
ủin
c. Các loại cảm biến hay đợc sử dụng trong công
nghiệp và dân dụng
Cảm biến đo nhiệt độ (37,29%*)
Cảm biến đo vị trí (27,12%*)
Cảm biến đo di chuyển (16,27%*)
Cảm biến đo áp suất (12,88%*)
Cảm biến đo lu lợng (1,36%*)
Cảm biến đo mức (1,2%*)
Cảm biến đo lực (1,2%*)
Cảm biến đo độ ẩm (0,81%*)
*: Xếp theo số lợng các loại cảm biến bán đợc tại Pháp năm
2002
9
c ủim ca cỏc phng phỏp ủo cỏc ủi lng khụng
ủin
d. Các lĩnh vực ứng dụng
Xe hơi : (38%*)
Sản xuất công nghiệp: (20%*)
Điện gia dụng : (11%*)
Văn phòng: (9%*)
Y tế: (8%*)
An toàn: (6%*)
Môi trờng: (4%*)
Nông nghiệp: (4%*)
*: Xếp theo số lợng các loại cảm biến bán đợc tại Pháp năm
2002
10
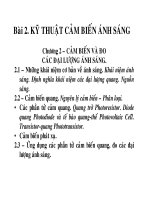
Sơ ñồ chuyển ñổi giữa các ñại lượng - các loại
cảm biến
E
n
c
o
d
e
r
B
i
Õ
n
t
r
ë
T
r
−
î
t
1
2
§
i
Ö
n
c
¶
m
3
5
§
i
Ö
n
t
r
ë
l
ù
c
c
¨
n
g
¸
p
®
i
Ö
n
4
7
¸
p
t
õ
6
Q
u
a
n
g
®
i
Ö
n
t
r
ë
N
h
i
Ö
t
®
i
Ö
n
t
r
ë
Q
u
a
n
g
®
i
Ö
n
1
1
1
0
N
h
i
Ö
t
®
i
Ö
n
8
9
T
(
M
,
Φ
)
T
(
L
,
Φ
)
T
(
t
,
Φ
)
T
(
L
s
,
t
)
T
(
M
,
t
)
T
(
L
,
Μ
)
T
(
L
,
U
)
T
(
C
,
U
)
T
(
R
,
U
)
T
(
L
,
U
)
T
(
L
,
C
)
T
(
M
,
U
)
T
(
M
,
R
)
T
(
M
,
L
)
T
(
t
,
U
)
T
(
t
,
R
)
T
(
Φ
,
U
)
T
(
Φ
,
R
)
Q
u
a
n
g
N
h
i
Ö
t
®
é
D
i
c
h
u
y
Ó
n
k
Ý
c
h
t
h
−
í
c
(
L
)
K
h
è
i
l
−
î
n
g
l
ù
c
(
M
)
U
,
I
R
L
C
T ( δ, L)
§
i
Ö
n
d
u
n
g
11
Biến ñổi giữa các ñại lượng (ñiện) của tín
hiệu- Biến ñổi thống nhất hóa
12
Hoà hợp tải giữa cảm biến và mạch đo
Cấp nguồn cho cảm biến thụ đông
Tuyến tính hoá đặc tính phi tuyến của cảm biến
Tuyến tính hoá tín hiệu ra của mạnh đo (VD cầu
Wheastone)
Khuyếch đại tín hiệu ra của cảm biến
Lọc nhiễu tác động lên tín hiệu ra của cảm biến
Khuyếch đại đo lờng để triệt tiêu hoặc làm giảm các
nhiễu tác động (điện áp ký sinh và dòng điện rò trên đờng
truyền)
4. Các dạng biến đổi chuẩn hoá thờng gặp
13
Vấn ñề của bộ thống nhất hoá
Cảm biên
Cảm biên
Chuẩn hoá tín
hiệu
Signal
Cảm biến
Cảm biến
Thống nhất hoá
cảm biến
thụ ñộng
Signal
Tín hiệu
Đã thống nhất
hoá
Thích ứng về trở kháng
tuyến tính hoá
Khuếch ñại
Thống nhất
Hoá cảm biến
thụ ñộng
14
Vớ d
Chuyển đổi /tín hiệu
Cặp nhiệt ngẫu
Nhiệt điện trở RTD
Cảm biến điện trở
lực căng
Đất chung
hoặc địên áp cao
Các tảI yêu cầu chuyển
mạch xoay chiều hoặc
dòng điện lớn
Các tín hiệu với
nhiễu tần số cao
Khuếch đại, tuyến tính hoá
và bù đầu tự do
Thống nhất hóa tín hiệu
Nguồn nuôI, cấu hình 4 dây
và 3 dây, tuyến tính hóa
Nguồn điện áp cung cấp
cho cầu, cấu hình và
tuyến tính hoá
Khuếch đại cách ly
(cách ly quang)
Rơle điện cơ hoặc rơle
bán dẫn
Lọc thông thấp
Thiết bị DAQ
15
Hoà hợp trở kháng
V
O
= V
i
.
R
2
R
1
+R
2
V
i
R
1
R
2
0
Một chuỗi ño có thể coi là một
phân áp
V
O
= V
i
.
R
2
R
1
+R
2
V
i
R
1
R
2
Z1 << Z2
Nguồn áp
Nguồn dòng
bộ biến ñổi
dòng - áp
kiểu mạch lặp lại
Nguồn
Tại ño lường
Nguồn
tại ño
lường
16
Hoà hợp trở kháng
Nguồn ñiện tích
khuếch ñại ñiện tích
Điện tích ñược ñưa vào một tụ ñiện không ñổi Cr, khi tích luỹ vào tụ tạo ra một ñiện áp trên
cực của tụ ñiện tỉ lệ với ñiện tích nạp vào
Khuếch ñại ño lường
Mạch vào vi sai
Mạch vào vi sai
17
Thụng s k thut ca cm bin
Di ủo, ngỡng nhạy và ủ phân gii khả năng phân
ly
Độ nhạy và Tính tuyến tính của thiết bị
Sai số hay độ chính xác
Đặc tính động
Một số thông số khác nh: công suất tiêu thụ, tr
kháng, kích thớc, trọng lợng của thiết bị
18
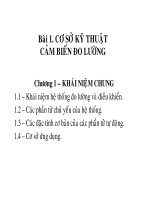
4.2.1. nhy
Phng trinh c bn
Y= F(X,a,b,c )
F/X - ộ nhạy với x (Sensibility)
F/a - ộ nhạy của yếu tố anh hởng a hay nhiễu
F/X = K
Xt
- ộ nhạy theo X ở X
t
hay ngời ta còn ký hiệu là S
Khi K=const -> X,Y là tuyến tính.
K=f(X) -> X, Y là không tuyến tính - > sai số phi tuyến.
Việc xác định K bằng thực nghiệm gọi là khắc độ thiết bị đo. Với một giá trị
của X có thể có các giá trị Y khác nhau, hay K khác nhau.
dK
Xt
/K
Xt
(Repeatability)Thể hiện tính ổn định của thiết bị đo hay tính lặp lại
của thiết bị đo .
dK
Xt
/K
Xt
= dS/S=
s
- Sai số độ nhạy của thiết bị đo -> nhân tính.
(Hysteresis)
19
Độ nhạy
20
Trễ hay trơ của thiết bị (Hysteresis)
21
Tính lặp lại
22
4.2.2. H s phi tuyn ca thit b
ể đánh giá tính phi tuyến của thiết bị đo ta xác định hệ số
phi tuyến của nó.
Hệ số phi tuyến xác định theo công thức sau:
. X
max
- là sai lệch lớn nhất
Ta thờng dùng khâu bù phi tuyến
S
cb
.S
b
= K
(Nonlinearity Error)
n
max
pt
X
X
K
=
X
Y
X
Y
23
Khong ủo, ngng nhy
v kh nng phõn ly
Khoảng đo (Span/Full Scal/Range): D
x
= X
max
X
min
Ngỡng nhạy, khả năng phân ly (Resolution):
Khi gim X mà Y cũng gim theo, nhng với X
X
khi
đó không thể phân biệt đợc Y,
X
đợc gọi là
ngỡng nhạy của thiết bị đo.
Kh nng phân ly của cm bin
-Thiết bị tơng tự
-Thiết bị số:
X
x
X
D
R
=
n
g
X
X
N
D
R =
=
24
4.2.6. Đặc tính động của thiết bị (1)
Hàm truyền cơ bản : Y(p)=K(p).X(p)
Đặc tính động:
+ Đặc tính quá độ
+ Đặc tính tần
+ Đặc tính xung
Khi đại lợng X biến thiên theo thời gian ta sẽ có quan hệ
(t)=S
t
[X(t)]
Quan hệ đợc biểu diễn bằng một phơng trình vi phân. Phơng trình
vi phân ấy đợc viết dới dạng toán tử.
(p)=S(p).X(p)
S(p)- Gọi là độ nhạy của thiết bị đo trong quá trình đo đại lợng động
X
4
X
3
X
2
X
1
X
25
Đặc tính động của cảm biến (2)
Khi đại lợng X biến thiên theo thời gian ta sẽ có quan hệ
(t)=S
t
[X(t)]
Quan hệ đợc biểu diễn bằng một phơng trình vi phân. Phơng trình vi phân ấy
đợc viết dới dạng toán tử.
(p)=S(p).X(p)
S(p)- Gọi là độ nhạy của thiết bị đo trong quá trình đo đại lợng động