Thiết kế cơ cấu đàn hồi tạo chuyển động thẳng độ phân giải micron
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (844.66 KB, 69 trang )
LUẬN VĂN TỐT NGHIỆP
GVHD : TS. PHẠM HUY HÒANG
LỜI MỞ ĐẦU
Hiện nay , khoa học kỹ thuật phất triển ngày càng mạnh mẽ . Bên cạnh
những ngành khoa học truyền thống được củng cố và phát triển nhằm phục vụ đời
sống và sản xuất ngày một tốt hơn , một ngành khoa học mà hiện nay đang được
thế giới nghiên cứu và phát triển nhằm đem lại những lợi ích thiết thực cho con
người , đó là CÔNG NGHỆ CHÍNH XÁC . Thực chất , ngành khoa học này đã
xuất hiện từ lâu , tuy nhiên việc tìm tòi và nghiên cứu vẫn không ngừng phát triển
nhằm tìm ra những giải pháp kinh tế hơn . Với đề tài THIẾT KẾ CƠ CẤU ĐÀN
HỒI TẠO CHUYỂN ĐỘNG THẲNG CÓ ĐỘ PHÂN GIẢI MICRON sẽ giúp em
hiểu thêm về Công nghệ chính xác hiện nay .
Do hạn chế về thời gian cũng như kiến thức và tầm nhìn của một sinh viên,
luận văn này không thể tránh khỏi những thiếu sót nhất đònh. Kính mong sự chỉ
dẫn và những lời khuyên quý báu của Thầy hướng dẫn và Hội đồng. Em xin chân
thành cám ơn .
SVTH : NGUYỄN HỒNG TÂM
1
LUẬN VĂN TỐT NGHIỆP
GVHD : TS. PHẠM HUY HÒANG
MỤC LỤC
CHƯƠNG I :
GIỚI THIỆU CƠ CẤU ĐÀN HỒI VÀ ỨNG DỤNG
I – Giới thiệu sự đàn hồi
II – Ưu và nhược điểm của đàn hồi
III – Ứng dụng của đàn hồi .
IV – Đại diện cho đàn hồi .
CHƯƠNG II :
THIẾT KẾ ĐỘNG HỌC : PHÂN TÍCH VÀ CHỌN LỰA CƠ
CẤU KHÂU CỨNG GIẢ LẬP- LỰA CHỌN DẠNG TỰ DO
I – Phân tích một vài cơ cấu phẳng có khả năng tạo .
chuyển động thẳng ở đầu ra .
II – Lựa chọn cơ cấu đặt Piezo .
CHƯƠNG III :
PHÂN TÍCH VÀ THIẾT KẾ CƠ CẤU THEO ĐỘ CỨNG
VỮNG
I – Ma trận Jacobi các bản lề .
II – Ma trận mềm các bản lề .
III – Mô phỏng bằng Ansys .
CHƯƠNG IV : HOÀN THIỆN VIỆC THIẾT KẾ
I – Những bộ phận phụ trợ nhằm tăng cường độ cứng .
II – Bố trò vò trí đặt Piezo .
CHƯƠNG V :
HƯỚNG PHÁT TRIỂN ĐỀ TÀI .
I – Kết luận .
II – Hướng phát triển đề tài .
SVTH : NGUYỄN HỒNG TÂM
2
LUẬN VĂN TỐT NGHIỆP
GVHD : TS. PHẠM HUY HÒANG
CHƯƠNG I : GIỚI THIỆU CƠ CẤU ĐÀN HỒI
VÀ ỨNG DỤNG
I) Giới thiệu :
Đàn hồi đại diện cho rộng rãi các phần tử mềm dẻo dùng cho việc nối các
phần tử rắn . Cơ cấu đàn hồi được sản xuất liên tục cho việc nối số lượng lớn các
vật rắn, hay các thanh , và phần tử đàn hồi hay các khớp , trong một vài trường
hợp , chúng thích hợp cho việc đặt lực , ở đó sẽ xác đònh được chuyển động của
các thanh liên kết hay với các phần khác liên quan . Do vậy , ích lợi của cơ cấu
đàn hồi là duy trì độ chính xác quan hệ hình học giữa các khâu trong khi đồng thời
cung cấp độ mềm thích hợp theo những hướng đặc biệt . Độ chính xác quan hệ
hình học có thể đạt được nhờ việc đặt các ràng buộc một cách hợp lý , trong khi
mối quan hệ chuyển động đòi hỏi phải được tự do . Bởi vì việc đòi hỏi các ràng
buộc và tự do là khác nhau theo hứơng , do đó việc đòi hỏi trong nhiều trường hợp
luôn được thực hiện sẵn sàng . Vì vậy các hướng có thể được xấp xỉ bằng cách sử
dụng các phần tử đàn hồi , độ mềm dẻo hình học của chúng cao hay thấp phụ
thuộc theo hứơng yêu cầu .
Trong nhiều ứng dụng và trong khoảng giới hạn , sự đàn hồi cung cấp
những giải pháp kinh tế để giải quyết những chuyển động hay lực siêu chính xác
mà với những trường hợp khác sẽ không cho các kết quả như ý muốn (có thể thực
hiện được nhưng khá tốn kém) .
Sự biến dạng đàn hồi đã được sử dụng trong có thiết bò cực bé và máy móc
chính xác có độ ổn đònh cao cách đây hơn 300 năm .
1.
2.
3.
4.
5.
II) Ưu – Nhược điểm của sự đàn hồi :
1)Ưu điểm của sự đàn hồi :
Như chúng ta được biết , mọi sự truyền động trong cơ khí đều có một nhược
điểm là luôn luôn có khe hở giữa khớp nối hai khâu , điều này dẫn đến việc
truyền động không chính xác . Cơ cấu đàn hồi sẽ khắc phục điều này (Vì sự
truyền động trong cơ cấu đàn hồi hòan tòan không có khe hở) , điều này đã
giúp cho ta có thể thực hiện những chuyển động nhỏ hơn hay bằng micron .
Chúng đơn giản và không đắt để sản xuất và lắp ráp .
Sử dụng cho đến khi vết nứt mỏi phát triển (do cơ cấu đàn hồi chòu sự tác
động lặp đi lặp lại ).
Cơ cấu hoàn chỉnh có thể được chế tạo từ một khối .
Cơ cấu đòn bẩy được thực hiện một cách dễ dàng .
SVTH : NGUYỄN HỒNG TÂM
3
LUẬN VĂN TỐT NGHIỆP
GVHD : TS. PHẠM HUY HÒANG
6. Sự dòch chuyển mềm mại và thẳng . Cho đến những ứng dụng đòi hỏi sự
dòch chuyển cỡ nguyên tử . Sự đàn hồi được chỉ ra có thể sẵn sàng chế tạo
và lặp lại những chuyển động .
7. Cơ cấu lỗi như sự mỏi có thể dễ dàng nhận biết .
8. Chúng được thiết kế mà không nhạy với sự thay đổi nhiệt độ và sự ảnh
hưởng của môi trường . Thiết kế đối xứng có thuộc tính cố hữu là bù trừ và
cân bằng .
9. Có quan hệ tuyến tính giữa lực tác dụng và dòch chuyển đối với sự chuyển
động nhỏ giữa hai khâu .
2)Nhược điểm của sự đàn hồi :
1. Khó khăn trong việc dự đóan độ chính xác giữa lực và chuyển vò , vì điều
này đòi hỏi sự hiểu biết chính xác về mun đàn hồi và tỷ số hình học / kích
thước . Mặc dù dung sai chế tạo không cao nhưng cũng sẽ dẫn đến sự không
ổn đònh giữa sự biến dạng thực tế và dự đoán .
2. Một loại ứng suất quan trọng là có hiện tượng trễ trong đặc điểm kéo nén
của hầu hết các vật liệu .
3. Độ đàn hồi bò hạn chế trong sự kéo dài do kích thước và độ cứng .
4. Độ cứng ra có giá trò tương đối thấp và độ cứng cao theo hướng cắt ngược lại
5. Chúng không thể chòu đựng những tải trọng lớn .
6. Khi bò quá tải có thể gây hậu quả nghiêm trọng hay làm giảm tuổi thọ .
7. Khi tải trọng lớn , có nhiều hơn một trạng thái thăng bằng , có thể kể đến sự
không ổn đònh khi uốn …
Mục tiêu của việc thiết kế cơ cấu đàn hồi :
1. Cung cấp những đọan dòch chuyển nhỏ và chính xác .
2. Cung cấp sự dòch chuyển chính xác nhằm vào những ứng dụng những trường
hợp đặt biệt đặt lực .
3. Ngược lại trên .
1.
2.
3.
4.
Sự cân nhắc khi thiết kế :
Nhận ra nhu cầu .
Thiết lập những đòi hỏi của bản thiết kế .
Nhận thức và sáng tạo .
Ứơc đònh khả năng thực hiện (tính tiện lợi )
SVTH : NGUYỄN HỒNG TÂM
4
LUẬN VĂN TỐT NGHIỆP
GVHD : TS. PHẠM HUY HÒANG
III) Ứng dụng của cơ cấu đàn hồi :
- Dùng để nối các sợi quang (fiber optic) có kích thước rất nhỏ từ : 8-9
micron : nếu mối nối không chính xác sẽ làm cho cường độ băng thông
giảm đi .
- Dùng để đo lường và tạo những di chuyển có độ dòch chuyển 1m
- Dùng trong các thiết bò sản xuất chất bán dẫn , kính hiển vi điện tử và
quang
IV) Những yếu tố ảnh hưởng đến độ phân giải micron trong cơ cấu đàn
hồi :
- Cơ cấu .
- Độ cứng vững .
- Bộ phận tác động .
- Cảm biến .
Đối với hai yếu tố : cơ cấu và độ cứng vững sẽ phân tích ở các phần sau .
Sau đây ta chỉ nghiên cứu sơ bộ về sự phụ thuộc của bộ phận tác động và cảm
biến đến độ phân giải micron trong cơ cấu đàn hồi .
*Đối với bộ phận tác động : Như ta đã biết , cơ cấu đàn hồi do không có khe
hở nên có thể truyền dẫn những chuyển động có độ phân giải micron . Tuy nhiên ,
nếu chúng ta không có bộ phận tác động có độ phân giải cao hơn hoặc bằng thì
việc nghiên cứu cũng sẽ trở nên vô nghóa . Hiện nay trên thế giới có một bộ phận
có thể đáp ứng được yêu cầu trên , đó là Piezo Electric . Sau đây , em xin trình bày
sơ bộ về bộ phận tác động này :
TÌM HIỂU VỀ PIEZO
A) Ưu điểm :
1) PZT có thể tạo ra những sự thay đổi vò trí cực kỳ chính xác với
khoảng dòch chuyển nanomet . Sự thay đổi điện áp ở mức nhỏ nhất sẽ biến
đổi thành những chuyển động cực nhỏ . Sự di chuyển này không bò ảnh
hưởng bởi sự ma sát và điện áp ban đầu .
2) Cung cấp lực lớn :
- PZT có thể cung cấp lực rất lớn , khoảng 10.000 N với đoạn dòch
chuyển khoảng 10m .
3) Độ co giãn nhanh chóng :
4) Không bò ảnh hưởng bởi từ trường :
Tuy PZT có liên quan đến điện trường nhưng nó không tạo ra từ trường .
Đặc biệt thích hợp khi dùng vào những ứng dụng mà đòi hỏi từ trường không bò
thay đổi .
SVTH : NGUYỄN HỒNG TÂM
5
LUẬN VĂN TỐT NGHIỆP
GVHD : TS. PHẠM HUY HÒANG
5) Tiêu hao năng lượng thấp :
Tác động của PZT là do sự biến đổi điện năng thàn chuyển động , do đó nó
chỉ phụ thuộc vào điện năng trong suốt quá trình chuyển động . Nó có thể duy trì
trạng thái tónh tại khi giữ vật nặng mà không làm tiêu hao năng lượng (có thể tìm
một vài cơ cấu khác mà tiêu tốn năng lượng trong suốt quá trình giữ vật : thuỷ lực ,
khí nén chẳng hạn …)
B) Ứng dụng :
1) Trong kỹ thuật quang học và đo lường :
- n đònh trong quá trình chụp ảnh
- Quan sát bằng kính hiển vi
- Nối các sợi quang
2) Trong cơ khí chính xác và kỹ thuật chính xác :
- Điều chỉnh dụng cụ .
- Điều khiển đường cắt ra vào của dụng cụ .
- Sử dụng trong bước cuối cùng cho các phương pháp gia công : khoan , tiện
, mài .
C) Piezo vò trí :
1)Tác dụng :
Trong phạm vi giới hạn cho phép , ta chỉ có thể nghiên cứu Piezo vò trí
Tác dụng của PZT thường được sử dụng trong đời sống hàng ngày . Ví dụ :
trong bộ phận đánh lửa của hột quẹt , dưới áp suất thấp tạo ra năng lượng điện đủ
lớn để đốt cháy gas . Xa hơn nữa là các thiết bò báo động dùng phần tử Piezo . Khi
dòng điện AC tác dụng thì vật liệu Piezo di chuyển với tần số dòng điện và tạo ra
âm thanh đủ lớn để báo thức mọi người .
Piezo cũng được sử dụng trong lónh vực như trong tàu ngầm trong Thế chiến
thứ nhất .
PZT đem lại những lợi ích trong chuyển động :
- Khả năng lặp lại với bước dòch chuyển nanomet và thấp hơn nanomet với
tần số cao chỉ có ở PZT .
- PZT có thể được thiết kế để di chuyển các rải trọng lớn và có thể di chuyển
với tần số khoảng 10kHz .
- PZT không đòi hỏi duy trì tác động vì chúng ở trạng thái rắn và sự di chuyển
của chúng dựa trên tác dụng của các phân tử .
2)Phân lọai :
Có 2 loại : PZT điện áp thấp và cao
PZT điện áp thấp đòi hỏi khoảng 100V , ngược lại điện áp cao đòi hỏi khoảng
1000V cho sự giãn tối đa . . Hiện nay , loại Piezo sử dụng vật liệu gốm sứ
SVTH : NGUYỄN HỒNG TÂM
6
LUẬN VĂN TỐT NGHIỆP
GVHD : TS. PHẠM HUY HÒANG
thường được dùng . Điện áp lớn nhất mà có thể chòu đựng khoảng 1 đến 2
KV/mm . Để giữ điện áp trong giới hạn thực tế , PZT bao gồm các lá mỏng
được liên kết với nhau . Độ dòch chuyển của Piezo là tổng độ dòch chuyển của
các lá . Đối với các Piezo điện áp cao thì các lá có độ dày từ 0.5 đến 1 mm
.Trong khi các Piezo điện áp thấp thì độ dày các tấm là 20 đến 100 m .
3)Sử dụng Piezo : dùng cho mạch kín và mạch hở :
Đối với mạch hở : độ chính xác về vò trí không đòi hỏi quá cao , khi vò trí được
điều khiển bới cảm biến bên ngoài . Trong mạch hở xuất hiện hiện tượng trễ .
Đối với mạch kín được dùng cho những ứng dụng đòi hỏi độ thẳng cao , độ bền
dọc theo hướng di chuyển , độ lặp lại và chính xác cao . Mạch kín được trang bò
cho các hệ thống đo lường nhằm cung cấp những giải pháp nanomet
4)Những thuộc tính cơ học quan trọng :
Độ cứng vữnng : Piezo được xem như hệ lò xo , độ cứng là hằng số và phụ
thuộc vào môđun đàn hồi , diện tích mặt cắt ngang và chiều dài vật liệu .
Chòu tải trọng cao : Piezo có thể chòu được lực nén lớn và di chuyển tải trọng
đến vài tấn .
Bảo vệ từ những ảnh hưởng cơ học :
Vì Piezo gốm có độ dòn , không thể chòu được lực kéo và cắt , vì vậy phải thiết
kế để tránh xảy ra trường hợp này .
*Đối với bộ phận cảm biến : Tuy có thể đạt được độ chính xác khá cao
nhưng trong cơ cấu đàn hồi nhất thiết phải có bộ phận cảm biến , có thể là cảm
biến lực , vò trí … nhằm dễ dàng theo dõi kết quả và ổn đònh trong quá trình họat
động . Khi sử dụng cảm biến có thể sử dụng mạch hở hay mạch kín tùy theo độ
chính xác yêu cầu .
IV) Đại diện cho sự đàn hồi : “Phần tử bản lề đàn hồi”
Bản lề đàn hồi là một phần tử mỏng , cung cấp chuyển động quay cho hai
phần tử rắn được liên kết với nhau trong quá trình bò uốn , những nơi mà cơ cấu
thường là những khớp quay . Trong chức năng quay này , bản lề đàn hồi bò giới
hạn góc quay và phụ thuộc vào cấu trúc vật liệu .
SVTH : NGUYỄN HỒNG TÂM
7
LUẬN VĂN TỐT NGHIỆP
GVHD : TS. PHẠM HUY HÒANG
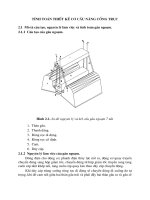
Hình 1 : Những khớp có khả năng tạo chuyển động quay trong cơ khí
a) Khớp quay truyền thống - b) Bản lề đàn hồi
Hình 2 : Chức năng tương tự của khớp quay và bản lề đàn hồi
Bản lề đàn hồi bao gồm những khu vực có thể uốn đàn hồi hay những nơi
mỏng giữa hai phần tử nối với nhau mà nó phải chòu đựng trong giới hạn quay của
cơ cấu đó (có thể gọi là độ mềm của phần tử đàn hồi) .
Bản lề đàn hồi đem lại những lợi ích sau :
+ Không khe hở .
+ Không ma sát .
SVTH : NGUYỄN HỒNG TÂM
8
LUẬN VĂN TỐT NGHIỆP
GVHD : TS. PHẠM HUY HÒANG
+ Không cần bôi trơn .
+ Không xảy ra hiện tượng trễ .
+ Cứng vững .
+ Dễ dàng chế tạo .
+ Hầu như không cần bảo quản .
+ Có khả năng ứng dụng trong các lónh vực đòi hỏi kích thước cực
nhỏ.
Vì bản lề cứng vững nên chúng không đòi hỏi sửa chữa , dử dụng cho đến
khi hư hỏng .
Tuy nhiên , bản lề đàn hồi có một vài giới hạn , ví dụ như một vài trờ ngại
sau :
+ Bản lề đàn hồi cung cấp những chuyển động quay ở mức thấp .
+ Chuyển động quay không thuần túy , bởi vì sự biến dạng đàn hồi là
phức tạp khi nó được tạo ra bởi tải trọng cắt , xoắn và uốn .
+ Tâm quay không được cố đònh trong suốt quá trình chuyển động .
+ Bản lề đàn hồi thường rất nhạy với sự thay đổi nhiệt độ . Vì vậy
kích thùc của chúng sẽ tahy đổi khi có sự tăng hay giảm nhiệt .
Dựa vào hình dạng của bản lề chia ra làm ba dạng , đó là : một trục , hai
trục và nhiều trục mềm . Đối với bản lề một trục : cho những ứng dụng hai chiều
như những chuyển động phẳng , hai trục hay nhiều trục cho những ứng dụng ba
chiều như chuyển động không gian .
Hình 3 : Mối quan hệ giữa hình dạng bản lề đàn hồi và những ứng dụng
SVTH : NGUYỄN HỒNG TÂM
9
LUẬN VĂN TỐT NGHIỆP
GVHD : TS. PHẠM HUY HÒANG
Hình 4 : Phân lọai bản lề đàn hồi dựa trên hình dạng : a)Một trục mềm –
b)Nhiều trục mềm – c)Hai trục mềm .
SVTH : NGUYỄN HỒNG TÂM
10
LUẬN VĂN TỐT NGHIỆP
GVHD : TS. PHẠM HUY HÒANG
CHƯƠNG II : THIẾT KẾ ĐỘNG HỌC :
PHÂN TÍCH VÀ CHỌN LỰA CƠ CẤU KHÂU
CỨNG GIẢ LẬP- LỰA CHỌN DẠNG TỰ DO
Công việc của chương này là tìm ra cơ cấu phẳng tạo chuyển động thẳng .
Từ cơ cấu phẳng này ta sẽ thay các khớp xoay thành các bản lề đàn hồi (như đã
trình bày ở chương I . Như vậy , mục đích của chương này là tìm ra các cơ cấu
phẳng tòan khớp thấp với góc quay có thể tạo ra độ khuyếch đại cao nhất . Sau
khi có các cơ cấu phẳng này , ta sẽ so sánh và lựa chọn theo các chỉ tiêu sẽ đề cập
sau đây để chọn ra cơ cấu tối ưu nhất để tạo thành cơ cấu họat động dựa trên
nguyên tắc đàn hồi mà ta đã đề cập ở chương I . Các chỉ tiêu đánh giá để lựa chọn
cơ cấu là :
+ Có độ khuếch đại cao .
+ Có độ cứng vững cao (có thể tạo thành cơ cấu đối xứng từ cơ cấu đã cho).
+ Đơn giản .
Sau đây là một vài cơ cấu phẳng truyền thống , ta sẽ phân tích và so sánh ưu
nhược điểm của từng cơ cấu này :
I) Phân tích một vài cơ cấu phẳng có khả năng tạo chuyển động thẳng ở
đầu ra :
SƠ ĐỒ 1 : CƠ CẤU TAY QUAY CON TRƯT
SVTH : NGUYỄN HỒNG TÂM
11
LUẬN VĂN TỐT NGHIỆP
GVHD : TS. PHẠM HUY HÒANG
Ta có thể biểu diễn cơ cấu trên bởi các vectơ vò trí :
Theo sơ đồ trên ta thấy :
AB BC AC
a.e X1.i ka.e X 2.i S
(1)
Đạo hàm phương trình (1) theo thời gian :
a.(1 .i).e X1i ka .( 2 .i).e X 2i V3
(2)
Với :
e Xi cos X i sin X
Tách phương trình (2) thành phần thực và phần ảo , ta đựơc hệ phương trình
sau :
a .1 . sin X1 ka . 2 . sin X 2 V3
a.1 cos X1 ka . 2 . cos X 2 0
a.1 . sin X1 a.1 . cos X1. tan gX 2 V3
1 . cos X1
2 k. cos X 2
(3)
Vậy :
V3 1 .a . sin X1 1 .a. cos X1. tan gX 2
Với :
X 2 arcsin(1 / k. sin X1)
Lập tỷ số giữa V3 và 1 .a , ta được :
V3
1 .a
sin X1 cos X1. tan g(arcsin(1 / k. sin X1))) f (X1, k )
SVTH : NGUYỄN HỒNG TÂM
12
LUẬN VĂN TỐT NGHIỆP
GVHD : TS. PHẠM HUY HÒANG
Ta thấy hàm số trên phụ thuộc vào 2 giá trò X1 và k
Ta có đồ thò biểu diễn mối quan hệ giữa X1 và f(X1,k)
ĐỒ THỊ BIỂ U DIỄN MỐ I QUAN HỆ GIỮ A X1 VÀ V3/V1
1.5
1
V3/V1
0.5
0
-0.5
-1
-1.5
0
1
2
3
4
5
6
7
X1
Với
1/k = 0.5 : đường liền
1/k = 0.6 : đường ‘+’
1/k = 0.7 : đường ‘o’
1/k = 0.8 : đường ‘*’
1/k = 0.9 : đường ‘ - - ‘
Từ bảng số liệu trên , ta thấy tỷ số V3/V1 đạt cực trò tại hai vò trí : X1=700 (X2=57.750) và X1=2900 với giá trò 1/k = 0,9
SVTH : NGUYỄN HỒNG TÂM
13
LUẬN VĂN TỐT NGHIỆP
X1
X2
.f(x1)
0
0
0
10
4.9
-0.26
20
9.8
-0.5
GVHD : TS. PHẠM HUY HÒANG
30
14.5
-0.7
40
18.7
-0.9
50
22.5
-1.03
60
25.7
-1.1
70
28
-1.12
80
29.5
-1.08
90
30
-1
100
29.5
-0.88
110
28
-0.76
120
25.7
-0.62
130
22.5
-0.5
140
18.7
-0.38
150
14.5
-0.27
160
9.8
-0.17
170
4.9
-0.08
180
0
0
190
-4.9
0.08
200
-9.8
0.17
210
-14.5
0.27
220
-18.7
0.38
230
-22.5
0.5
240
-25.7
0.62
250
-28
0.76
260
-29.5
0.88
270
-30
1
280
-29.5
1.08
290
-28
1.12
300
-25.7
1.1
310
-22.5
1.03
320
-18.7
0.9
330
-14.5
0.7
340
-9.8
0.5
350
-4.9
0.26
360
0
0
SƠ ĐỒ 2
Tương tự như sơ đồ (1), nếu ta tạo vận tốc V1 tại B thì vận tốc tạo tại D chỉ
bằng VD V1 / 5 nên tỷ số sẽ tăng lên 5 lần so với Cơ cấu ở Sơ đồ 1
V3
V1 / 5
V3
V1
( sin X1 cos X1. tan g(arcsin(1 / k. sin X1))) f (X1, k )
5.( sin X1 cos X1. tan g(arcsin(1/ k. sin X1))) f1 (X1, k )
SVTH : NGUYỄN HỒNG TÂM
14
LUẬN VĂN TỐT NGHIỆP
GVHD : TS. PHẠM HUY HÒANG
Ta có đồ thò biểu diễn mối quan hệ giữa X1 và f(X1,k)
ĐỒ THỊ BIỂ U DIỄN MỐ I QUAN HỆ GIỮ A X1 VÀ V3/V1
8
6
4
V3/V1
2
0
-2
-4
-6
-8
0
1
2
3
4
5
6
7
X1
Với
1/k = 0.5 : đường liền
1/k = 0.6 : đường ‘+’
1/k = 0.7 : đường ‘o’
1/k = 0.8 : đường ‘*’
1/k = 0.9 : đường ‘ - - ‘
Tương tự như sơ đồ (2) , ta có thể tăng tỷ số giữa V3 và 1 .a bằng sơ đồ số 3
như sau :
SVTH : NGUYỄN HỒNG TÂM
15
LUẬN VĂN TỐT NGHIỆP
GVHD : TS. PHẠM HUY HÒANG
SƠ ĐỒ 3
Đặt AB = a ; BC = ka ; AD = EF = 0.5AB ; FG = 0.5EF
Tương tự như cách tính sơ đồ đầu tiên , ta có :
V3 1 .a sin X1 1 .a. cos X1. tan gX 2)
Tương tự , nếu đặt PZT tại điểm G thì để tạo một vận tốc góc 1 ta chỉ cần
1
4
tạo ta một vận tốc góc 1, 1 . Vậy tỷ số tăng lên 4lần . Từ phương trình có thể
viết lại :
Lập tỷ số V3 .a , ta có:
1
V3
V1 / 4
V3
V1
sin X1 cos X1. tan g(arcsin(1 / k. sin X1))) f 2 (X1, k )
4.( sin X1 cos X1. tan g(arcsin(1 / k. sin X1))) f 2 (X1, k )
SVTH : NGUYỄN HỒNG TÂM
16
LUẬN VĂN TỐT NGHIỆP
GVHD : TS. PHẠM HUY HÒANG
SƠ ĐỒ 4
Nếu ta tác dụng vào khâu 1 một vận tốc V1 thì khâu 2 sẽ quay với vận tốc
V1
V
, khâu 3 cũng quay với vận tốc góc 3 2 1 .
a
a
V
Vậy vận tốc dài V3 3 .ka 1 .ka k.V1
a
V3
k
Lập tỷ số giữa V1 và V3 :
V1
góc 2
Vậy tuỳ theo hệ số k mà ta thu được giá trò tỷ số V3/V1 cao hay thấp .
Tuy nhiên, k không nên chọn quá lớn vì như thế sẽ làm cho hệ thống kém cứng
vững .
SVTH : NGUYỄN HỒNG TÂM
17
LUẬN VĂN TỐT NGHIỆP
GVHD : TS. PHẠM HUY HÒANG
SƠ ĐỒ SỐ 5 :
Từ sơ đồ trên , ta có phương trình vectơ như sau :
Với :
AE EB AB
R 0 R1.e iX1 R 2.e iX 2
Ro k
R1
2
(1)
(2)
2
R 2 R 0 R1 2.R 0.R1cos X1
X2=arcsin(R1.sinX1/R2)
Đạo hàm phương trình (1) theo thời gian t , ta có :
(3)
Tách phương trình (11) làm hai phần : phần thực và phần ảo , ta có hệ
phương trình sau :
i1R1.e ix1 i 2 R 2.e ix 2 V12 .e ix 2
1 .R1sin X1 2 .R 2 sin X 2 V12 . cos X 2
1R1. cos X1 2 .R 2 cos X 2 V12 .sin X 2
(4)
Từ hệ phương trình (12) ta có :
2
1 . cos(X1 X 2)
R2
(5)
Ta tính vận tốc của con trượt C , tương tự như cách tính trong sơ đồ (1) , ta có
VC R 4.2 sin(X 2) R 4. 2 . cos(X 2) tan g(X3) (6)
SVTH : NGUYỄN HỒNG TÂM
18
LUẬN VĂN TỐT NGHIỆP
Với :
X3 arcsin(
GVHD : TS. PHẠM HUY HÒANG
R 4. sin(X 2)
)
R3
R4 = 3.R1
R4 = k.R3
Lập tỷ số giữa VC và 1 .R1
VC
1 .R1
[ R 4. sin(X 2) R 4. cos(X 2). tan g(X3)].[
2
] (7)
1 .R1
Từ phương trình (1) -> (7) , ta có thể lập hệ phương trình sau :
2
VC
1 .R1 [ R 4. sin X 2 R 4. cos X 2. tan gX3].[ .R1]
1
R 4 3R1 kR 3
R 2 R 0 2 R12 2.R 0.R1. cos X1
X 2 arcsin( R1. sin X1)
R2
X3 arcsin( R 4. sin X 2 )
R3
. cos(X1 X 2)
2 1
R2
(8)
Từ hệ phương trình (8) , ta thấy tỷ số trên cũng phụ thuộc vào 2 giá trò X1 và
k.
Tuy nhiên , chúng ta không đi sâu vào khảo sát vì kết cấu phức tạp , không
thích hợp với cơ cấu FLEXURE của chúng ta
SƠ ĐỒ 6 :
SVTH : NGUYỄN HỒNG TÂM
19
LUẬN VĂN TỐT NGHIỆP
GVHD : TS. PHẠM HUY HÒANG
Trong cơ cấu trên ta thấy :
V1 . cos X1 V3
Vậy tỷ số giữa V3 và V1 là :
V3/V1 = cosX1
Ta thấy , tỷ số trên cao nhất là 1
Từ các chỉ tiêu đưa ra , ta thấy cơ cấu ở Sơ đồ số 2 (Cơ cấu tay quay con
trượt có tác dụng dạng đòn bẩy)
II) Tính toán và thiết kế kích thước cơ cấu – Lựa chọn cơ cấu đặt Piezo :
1) Tính tóan và thiết kế kích thước cơ cấu
Sau khi phân tích , dựa trên độ khuyếch đại (tỷ số giữa Vvào và Vra) , độ phức
tạp của kết cấu cũng như độ cứng vững , ta chọn cơ cấu số 2 .
Theo phân tích như trên thì tỷ số V3/V1 đạt cực trò tại góc X1=700, X2=-57.750 , với
giá trò k = 0.9.
Ta chọn : AB = 100mm ; AD = 20mm ; BC = 110mm ; X1 = 700 , X2 = 580
Sau khi chọn cơ cấu tác động , ta có thể đưa vào công việc chính của ta là tạo
chuyển động thẳng :
SVTH : NGUYỄN HỒNG TÂM
20
LUẬN VĂN TỐT NGHIỆP
GVHD : TS. PHẠM HUY HÒANG
Như ta thấy , cơ cấu trên sử dụng 2 cơ cấu tay quay con trượt để tạo thành hệ
thống đối xứng nhằm tăng độ cứng vững cho hệ thống . Tuy nhiên khi ta đặt Piezo
tại vò trí D thì phải tốn 2 Piezo và đòi hỏi hai Piezo phải hoàn toàn giống nhau
(điều này rất khó đạt được) , tốn kém chi phí .
2) Lựa chọn cơ cấu đặt Piezo :
Mục tiêu của việc lựa chọn cơ cấu đặt Piezo là không làm giảm đọan dòch
chuyển của Piezo , chỉ sử dụng một Piezo mà thôi . Sau đây là 3 phương án để đặt
Piezo :
PHƯƠNG ÁN 1
SVTH : NGUYỄN HỒNG TÂM
21
LUẬN VĂN TỐT NGHIỆP
GVHD : TS. PHẠM HUY HÒANG
PHƯƠNG ÁN 2
PHƯƠNG ÁN 3
SVTH : NGUYỄN HỒNG TÂM
22
LUẬN VĂN TỐT NGHIỆP
GVHD : TS. PHẠM HUY HÒANG
Với phương án 1 : cơ cấu tác động đơn giản , tuy nhiên sẽ làm giảm khoảng
dòch chuyển của Piezo khi nó tác động. Vì vậy phải bố trí cơ cấu sao cho không
ảnh hưởng đến khoảng dòch chuyển của Piezo .
Với phương án 2 (tương tự như phương án 1) nhờ cơ cấu đòn bẩy không
những không làm giảm mà còn khuyếch đại đoạn dòch chuyển của Piezo khi nó tác
động . Tuy nhiên , cơ cấu sẽ không được cứng vững (do bất đối xứng)
Đối với phương án 3 , tuy cũng có độ khuyếch đại tốt, cứng vững cao nhưng
kết cấu quá phức tạp .
Vậy ta chọn phương án số 1 làm cơ cấu đặt Piezo tác động vào hệ thống
chính . Ta phải lựa chọn kích thước các khâu để không ảnh hưởng đến khoảng dòch
chuyển của Piezo .
Cụm tác động vào hệ thống được tách ra như sau :
Cơ cấu trên ta dễ dàng thấy đây là cơ cấu tay quay con trượt nhưng vò trí tác
động không phải là tay quay mà là con trượt , ta phải chọn sao cho tỷ số Vvào và
Vra nhỏ hơn hay bằng 1 . Trong trường hợp tổng quát , ta xét cơ cấu tay quay con
trượt bò lệch tâm
SVTH : NGUYỄN HỒNG TÂM
23
LUẬN VĂN TỐT NGHIỆP
GVHD : TS. PHẠM HUY HÒANG
Tương tự cách tính toán trên, ta có :
(3.1)
V1 3 .AB.sin X3 3 .AB. cos X3. tan(X1)
AB sin X3 e
)
Với : X1 arcsin(
BC
Với e : độ lệch tâm của con trượt so với tay quay .
Thay vào (3.1) ta có :
AB sin X3 e
)) (3.2)
BC
V1
AB sin X3 e
(3.3)
sin X3 cos X3. tan(arcsin(
))
3 AB
BC
V1 3 .AB. sin X3 3 .AB. cos X3. tan(arcsin(
Vậy tỷ số
Vì góc X3 = 700 như ta đã biết , AB = 20 (mm) , vậy biểu thức (3.3) chỉ còn
phụ thuộc vào kích thước khâu BC và độ lệch tâm e . Chọn e = 12(mm), vậy biểu
thức (3.3) chỉ còn phụ thuộc vào kích thước khâu BC . Theo ta cho BC có độ dài từ
20(mm) -> 40(mm) .
Đồ thò biểu diễn mối quan hệ giữa BC và V1/V3 :
-0.99
-1
-1.01
V1/V3
-1.02
-1.03
-1.04
-1.05
-1.06
-1.07
20
22
24
26
28
30
BC
32
34
36
38
40
Như ta thấy ở đồ thò trên , tỷ số V1 / V3 1 khi BC = 40(mm)
Vậy X 1 arcsin((
e AB. sin( X 3)
12 20. sin 70
)) arcsin((
)) 10 0
BC
40
SVTH : NGUYỄN HỒNG TÂM
24
LUẬN VĂN TỐT NGHIỆP
GVHD : TS. PHẠM HUY HÒANG
Sau khi có kích thước sơ bộ của các khâu , ta bố trí sơ đồ hoạt động như sau :
Hình trên cho ta thấy được sơ bộ công việc chúng ta sẽ làm sau đây
Như trên hình trên ta thấy hệ thống trên gồm : các chân là cơ cấu tay quay
con trượt liên kết với một mặt phẳng phía trên . Mỗi chân xem là một chuỗi các
khâu nối tiếp với nhau , các chân được xem là song song với nhau .
Lý thuyết sơ bộ về biến dạng :
Đònh luật thuận nghòch : Ta chỉ nghiên cứu vật liệu có độ đàn hồi không đổi
và hệ thống có các thuộc tính sau :
+ Sự biến dạng (độ lệch và góc quay ) là rất nhỏ .
+ Vật thể có tính đàn hồi và vì vậy thuộc tính cố hữu của nó là sẽ bò biến
dạng khi có lực tác dụng .
+ Vật thể có tính đồng nhất và đẳng hướng .
SVTH : NGUYỄN HỒNG TÂM
25