Nghiên cứu các bộ khởi động sử dụng các module thiết kế theo chuẩn cho động cơ kđb xoay chiều ba pha với các phương thức và mục đích khởi động khác nhau đi sâu thiết kế khởi động sao tam giác và bộ khởi động đi
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (824.84 KB, 69 trang )
LỜI NÓI ĐẦU
Ngày nay động cơ không đồng bộ (KĐB) được sử dụng một cách rộng
rãi và phổ biến trong công nghiệp, nông nghiệp cũng như trong đời sống hàng
ngày. Động cơ KĐB có những ưu điểm nổi bật là: Kết cấu đơn giản, làm việc
chắc chắn, hiệu suất cao, giá thành hạ. Tuy vậy, máy điện KĐB cũng có
những nhược điểm như : hệ số công suất của máy không cao , khó khăn trong
điều chỉnh tốc độ nếu không có các thiết bị phụ trợ và cũng giống như các loại
động cơ khác là dòng khởi động khá lớn, nếu lưới điện có công suất hữu hạn
thì khi khởi động sẽ gây ra quá tải máy biến áp, gây sụt áp làm tăng tổn thất
trên đường dây và có thể làm ảnh hưởng đến các thiết bị đang cùng hoạt động
trên lưới. Chính những lí do này mà việc nghiên cứu các phương pháp khởi
động cho động cơ KĐB là hết sức quan trọng. Ngày nay do sự phát triển của
khoa học kĩ thuật, điện tử công suất và vi xử lí đã cho ra đời những thiết bị
khởi động động cơ KĐB. Các thiết bị này đã hạn chế dần những nhược điểm
của động cơ KĐB về vấn đề khởi động, mang lại hiệu quả kinh tế cao.
Module thiết kế theo chuẩn là một trong những thiết bị đó, đây là đề tài đã và
đang được nghiên cứu ở trong nước cũng như nước ngoài và đang được áp
dụng tại Việt Nam. Những ưu điểm mà bộ khởi động dùng các module chuẩn
đem lại là : thiết bị nhỏ gọn, có thể sử dụng được ở những nơi có không gian
chật hẹp, đáp ứng được các yêu cầu về khởi động và có thể áp dụng cho nhiều
lọai khởi động khác nhau : Khởi động sao-tam giác, khởi động tuần tự, khởi
động theo mức, khởi động theo một chương trình định trước. Đề tài: “ Nghiên
cứu các bộ khởi động sử dụng các module thiết kế theo chuẩn cho động
cơ KĐB xoay chiều ba pha với các phương thức và mục đích khởi động
khác nhau. Đi sâu thiết kế khởi động sao-tam giác và bộ khởi động điều
khiển tuần tự.” bao gồm 4 chương:
Chương 1: Các phương pháp khởi động động cơ KĐB xoay chiều 3
pha
1
Chương 2: Hệ thống điện trên tàu thuỷ với các yêu cầu về khởi
động
Chương 3: Nghiên cứu các bộ khởi động sử dụng các module thiết
kế theo chuẩn cho động cơ KĐB 3 pha với các phương thức và mục đích khởi
động khác nhau.
Chương 4: Chế tạo bộ khởi động sao-tam giác và bộ khởi động tuần
tự với các module chuẩn.
Hải Phòng, tháng 8 năm
2008
2
Chương 1
CÁC PHƯƠNG PHÁP KHỞI ĐỘNG
ĐỘNG CƠ KĐB XOAY CHIỀU 3 PHA
1.1 ĐẶT VẤN ĐỀ.
Theo yêu cầu của sản suất, động cơ điện lúc làm việc thường phải khởi
động và dừng máy nhiều lần. Tuỳ theo tính chất của tải và tình hình lưới điện
mà yêu cầu về khởi động đối với động cơ điện cũng khác nhau. Có khi yêu
cầu moment khởi động lớn ,có khi cần hạn chế dòng điện khởi động và có
khi cần cả hai. Những yêu cầu trên đòi hỏi động cơ phải có tính năng khởi
động thích ứng.
Trong nhiều trường hợp do phương pháp khởi động hay do chọn động
cơ có tính năng khởi động không thích đáng nên thường gây nên những sự cố
không mong muốn.
Nói chung khi khởi động một động cơ cần xét đến các yêu cầu cơ bản
sau:
+ Phải có moment khởi động đủ lớn để thích ứng với đặc tính cơ của
tải.
+ Dòng điện khởi động càng nhỏ càng tốt.
+ Phương pháp khởi động và thiết bị cần dùng đơn giản,rẻ tiền,chắc
chắn.
+ Tổn hao công suất trong quá trình khởi động càng thấp càng tốt.
Những yêu cầu trên thường mâu thuẫn với nhau, khi yêu cầu dòng điện
khởi động nhỏ thì thường làm cho moment khởi động giảm theo hoặc cần các
thiết bị phụ trợ đắt tiền.Vì vậy, phải căn cứ vào điều kiện làm việc cụ thể mà
chọn phương án khởi động thích hợp .
Hiện nay có các phương pháp khởi động sau:
+ Khởi động trực tiếp.
3
+ Khởi động bằng phương pháp hạ điện áp đặt vào stator động cơ KĐB
xoay chiều 3 pha.
- Phương pháp sử dụng cuộn kháng,
- Phương pháy sử dụng máy biến áp tự ngẫu,
- Phương pháp khởi động sao -tam giác.
- Khởi động động cơ roto dây quấn bằng phương pháp dùng điện trở
đưa vào mạch roto.
+ Khởi động mềm.
+ Khởi động bằng phương pháp biến tần.
1.2 KHỞI ĐỘNG TRỰC TIẾP.
R
S
T
CB
F
M
Hình 1. 1. Khởi động trực tiếp động cơ KĐB
Hình 1.1 trình bày sơ đồ khởi động trực tiếp động cơ xoay chiều ba
pha. Đây là phương pháp khởi động đơn giản nhất, thao tác chỉ cần đóng trực
tiếp động cơ điện vào lưới điện. Việc cấp một điện áp định mức cho động cơ
dị bộ roto lồng sóc, khi roto chưa kịp quay thực chất động cơ làm việc ở chế
độ ngắn mạch . Dòng điện khởi động trong động cơ lúc đó rất lớn, có thể gấp
dòng định mức từ 4 đến 8 lần . Tuy dòng khởi động lớn như vậy nhưng
moment khởi động lại nhỏ do hệ số công suất cos0 lúc đó rất nhỏ (cos0=0,10,2) mặt khác, khi khởi động từ thông cũng bị giảm do điện áp giảm làm cho
momemt khởi động càng nhỏ.
4
Dòng điện khởi động lớn gây ra hai hậu quả sau:
+ Nhiệt độ máy tăng vì tổn hao lớn ,nhiệt lượng toả ra ở máy nhiều (đặt
biệt là máy có công suất lớn hoặc thường xuyên phải khởi dộng). Vì thế trong
sổ tay sử dụng máy bao giờ cũng cho số lần khởi động tối đa và điều kiện
khởi động.
+ Dòng điện khởi động lớn làm cho sụt áp lưới điện lớn, gây trở ngại
cho các phụ tải cùng làm việc tronglưới điện.
Vì những lí do trên mà khởi động trực tiếp chỉ áp dụng cho động cơ
có công suất nhỏ và khởi động với tải nhẹ (moment cản trên trục động cơ
nhỏ). Khi khởi động nặng người ta không dùng phương pháp này.
1.3 KHỞI ĐỘNG BẰNG PHƯƠNG PHÁP HẠ ĐIỆN ÁP ĐẶT
VÀO STATOR ĐỘNG CƠ KĐB XOAY CHIỀU 3 PHA.
1.3.1 Phương pháp sử dụng cuộn kháng..
R
S
T
D1
CK
D2
I'
U'
M
Hình 1.2. Khởi động động cơ KĐB bằng cuộn kháng
Khi khởi động trong mạch điện stator đặt nối tiếp một điện kháng . Sau
khi khởi động song bằng cách đóng cầu dao D2 thì điện kháng này bị nối
ngắn mạch. Điều chỉnh trị số của điện kháng được dòng điện khởi động cần
5
thiết . Do có điện áp giáng trên điện kháng nên điện áp khởi động trên đầu
cực động cơ điện U’ sẽ nhỏ hơn điện áp lưới U1. Gọi dòng điện khởi động và
moment khởi động khi khởi động trực tiếp là I k và Mk , sau khi thêm điện
kháng vào dòng điện khởi động còn lại I’ k= k.Ik trong đó k < 1. Nếu cho rằng
khi hạ điện áp khởi động, tham số của máy điện vẫn giữ không đổi thì dòng
điện khởi động nhỏ đi, điện áp đầu cực động cơ điện sẽ là U’= k.U 1.Vì
moment khởi động tỉ lệ với bình phương của điện áp nên lúc đó moment khởi
động sẽ bằng M’k =k2.Mk
Ưu điểm: ưu điểm của phương pháp này là thiết bị đơn giản
Nhược điểm: Khi giảm dòng điện khởi động thì moment khởi động
cũng giảm xuống bình phương lần.
1.3.2 Dùng biến áp tự ngẫu để hạ điện áp khởi động.
R
S
T
D1
IL
T
D2
I'k
D3
U'k
M
Hình 1.3. Khởi động động cơ bằng biến áp tự ngẫu
Sơ đồ lúc khởi động như hình 1. 3 , trong đó T là biến áp tự ngẫu, bên
cao áp nối với lưới điện, bên hạ áp nối với động cơ điện, sau khi khởi động
xong thì cắt T ra (bằng cách đóng cầu dao D2 và mở cầu dao D3 ra). Gọi tỉ số
biến đổi của máy biến áp tự ngẫu là k T (kT<1) thì U’K= kT*U1, do đó dòng
6
điện khởi động và moment khởi động của động cơ điện sẽ là : I’ K=KT*IK và
M’K=KT2*MK , gọi dòng điện lấy từ lưới vào là I 1 (dòng điện sơ cấp của máy
biến áp tự ngẫu) thì dòng điện đó bằng I1=KT*IK=K2T*I’K
Ưu điểm: So với phương pháp trên ta thấy, khi chọn K T = 0,6 thì
moment mở máy vẫn bằng M’K= 0,36MK nhưng dòng điện khởi động lấy từ
lưới điện vào nhỏ hơn nhiều :I1= 0,36 IK, ngược lại khi lấy từ lưới vào một
dòng điện khởi động bằng dòng điện khởi động của phương pháp trên thì
phương pháp này ta co moment khởi động lớn hơn. Đó là ưu điểm của
phương pháp dùng biến áp tự ngẫu hạ thấp điện áp khởi động.
Nhược điểm:
- Moment có các bước nhảy do sự chuyển đổi giữa các điện áp.
- Chỉ có thể chọn một số lượng các điện áp do đó dẫn đến sự chọn lựa
các dòng điện không tối ưu.
- Không có khả năng cung cấp một điện áp khởi động có hiệu quả đối
với tải trọng thay đổi .
- Trong một số điều kiện khởi động đặc biệt giá thành của bộ khởi động
thường rất cao.
1.3.3 Khởi động bằng phương pháp đổi nối sao-tam giác(S-D).
Phương pháp khởi động (S/D) thích ứng với những máy khi làm việc
bình thường đấu tam giác. Khi khởi động ta đổi thành Y, như vậy điện áp đưa
vào mỗi pha chỉ còn U 1 3 .
Sau khi máy đã chạy, đổi lại thành cách đấu . Sơ đồ cách đấu dây như
ở hình 1. 4, khi khởi động thì đóng cầu dao D 1 , còn cầu dao D2 thì đóng về
phía dưới , như vậy máy đấu Y, khi máy đã chạy rồi thì đóng cầu dao D 2 về
phía trên, máy đấu theo . Theo phương pháp (S/D) thì khi dây quấn đấu Y
điện áp pha trên dây quấn là:
Ukf =
1
3
U 1 .Ta có :
7
I’kf =
1
3
Ik và M’k =
1
Mk
3
Khi đấu Y → If = Id (khi ấy Ukf = U1 và Ik =
động đấu Y thì dòng điện bằng I1 = I’kf =
3 Ikf ) cho nên khi khởi
1
1
Ikf = Ik nghĩa là dòng điện và
3
3
1
momen khởi động trực tiếp .Trên thực tế
3
moment khởi động đều bằng
trường hợp này tương tự như dùng một máy biến áp tự ngẫu để khởi động mà
tỉ số biến đổi điện áp là : KT=
1
3
.
Trong các phương pháp hạ điện áp khởi động nói trên ,phương pháp
khởi động Y- tương đối đơn giản nên được dùng rộng rãi đối với các động cơ
điện khi làm việc đấu tam giác.
Hình 1.4 ta thấy dòng khởi động bằng 1,4 đến 2,6 lần dòng định mức
Ưu điểm : Tương đối đơn giản nên được sử dụng rộng rãi với những
động cơ điện đấu tam giác.
Nhược điểm :
- Mức độ giảm của cường độ và moment không thể điều khiển được và
tương đối cố định bằng
1
giá trị định mức.
3
- Có bước nhảy lớn về cường độ và moment khi bộ khởi động chuyển
đổi sao sang tam giác. Chính các bước nhảy này tạo ra các ứng suất cơ khí và
đột biến về điện làm cho hệ thống dễ bị hư hỏng .Bước nhảy này xuất hiện do
khi động cơ đang hoạt động nguồn điện bị ngắt ,động cơ sẽ chuyển sang chế
độ máy phát với nguồn điện được tạo ra có giá trị tương đương với nguồn
cung cấp .
8
R
S
T
D1
Lµm ViÖc
D2
M
Y
Më M¸y
a)
I/I®m
M/M®m
6
3
5
2.5
4
2
3
1.5
2
1
1
0.5
0
0 0.25 0.5 0.75
n/n®m
0
b)
n/n®m
0
0.25 0.5 0.75
1
c)
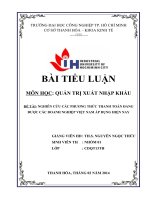
Hình 1.4.a. Khởi động Y/ ; b. Dòng Khởi Động; c. Moment khởi động
9
Giá trị điện áp này vẫn được duy trì khi động cơ nối lại với nguồn ở
chế độ đấu sao,tại đây xảy ra hiện tượng xung pha .Kết quả là tạo ra một dòng
điện có cường độ lên đến 2 lần giá trị dòng khởi động và moment lên đến 4
lần giá trị moment khởi động .Hình 1.5 trình bày quá trình này.
OFF
ĐẤU TAM GIÁC
ĐIỆN ÁP
15 x flc (tull load curent)
DÒNG ĐIỆN
50ms
+4 X FLt (tull load torque)
momen
-6 x flt
Hình.1.5.Điện áp,cường độ dòng điện
khi chuyển từ sao sang tam giác
10
1.4 KHỞI ĐỘNG ĐỘNG CƠ KĐB RÔTO DÂY QUẤN DÙNG
ĐIỆN TRỞ MỞ MÁY Ở MẠCH RÔTO.
Phương pháp này chỉ sử dụng cho động cơ rôto dây quấn vì điện trở ở
mạch ngoài mắc nối tiếp với cuộn dây rôto.
Hình 1.6 trình bày một sơ đồ mở máy qua 3 cấp điện trở phụ R 1, R2 và
R3 ở cả ba pha của rôto .Đây là sơ đồ mở máy với các điện trở rôto đối xứng.
~3
A
f
d
K3
f
d
R3
K2
b
R2
g
e 0
c
3
b
2
K1
R1
a
0
Mc M2
a)
b)
Hình 1.6 Sơ đồ khởi động động cơ KĐB qua
ba cấp điện trở (a) và đặc tính khởi động (b).
11
M1 Mth M
1
Lúc bắt đầu khởi động ,các tiếp điểm của côngtắctơ K1,K2,K3 đều
mở,cuộn dây rôto được nối vào cả 3 điện trở phụ(R 1+R2+R3) nên đường đặc
tính cơ là đường 1,động cơ được khởi động với moment khởi động là M mn=M1
và bắt đầu tăng tốc từ điểm a trên đường đặc tính 1.Tới điểm b tốc độ động cơ
đạt b và moment giảm còn M2 ,các tiếp điểm K1 đóng lại cắt các điện trở phụ
R1 ra khỏi mạch rôto .Động cơ được tếp tục khởi động với các điện trở phụ
(R2+R3) trong mạch rôto và chuyển ngang sang làm việc tại điểm c trên đặc
tính 2 ít dốc hơn,moment tăng từ M2 lên M1 và tốc độ động cơ lại tiếp tục tăng
.Động cơ làm việc trên đường đặc tính 2 từ c đến d.Lúc này các tiếp điểm K 2
đóng lại ,nối tắt các điện trở R 2 .Động cơ chuyển sang khởi động với điện trở
R3 trong mạch rôto trên đặc tính 3 tại điểm e và tiếp tục tăng tốc tới điểm f.
Lúc này các tiếp điểm K3 đóng lại,điện trở R3 trong mạch rôto bị loại ,động cơ
chuyển sang làm việc trên đường đặc tính cơ tự nhiên tại g và tăng tốc tới
điểm làm việc A ứng với moment cản Mc .Quá trình khởi động kết thúc.
Để đảm bảo cho quá trình khởi động như đã xét sao cho các điểm
chuyển đặc tính ứng với cùng 1 moment M2 ,M1 thì các điện trở phụ tham gia
vào mạch rôto lúc khởi động phải được tính chọn cẩn thận theo các phương
pháp riêng.
Ngoài sơ đồ khởi động với điện trở đối xứng ở mạch rôto ,trong thực tế
còn dùng sơ đồ khởi động với điện trở không đối xứng ở mạch rôto ,nghĩa là
điện trở khởi động được cắt giảm không đều trong các pha rôto khi khởi động.
Giả sử động cơ được khởi động với 4 cấp điện trở như H.7 với các điện
trở khởi động R1,R2,R3...R5 bố trí không đối xứng trong mạch rôto.
12
R5
R3
R5
K3
R3
K2
K3
R5
K5
R3
K5
K4
K2
K1
K4
K1
a)
K5
K1
R1 R2 R4
R1 R2 R4
K3
R1
b)
c)
R5
R3
K3
d)
K5
e)
f)
Hình 1.7 Sơ đồ khởi động với bốn cấp điện trở không đối xứng ở mạch rôto.
Lúc mới đóng điện toàn bộ các điện trở được đưa vào mạch rôto
(h.a) .Điện trở không đối xứng trong các pha tạo ra dòng điện ba pha không
đối xứng trong mạch rôto.Dòng điện này có thể phân tích thành 2 hệ thống
đối xứng thứ tự thuận và thứ tự ngược .Dòng điện 3 pha thứ tự thuận tạo ra từ
trường thuận quay cùng chiều với rôto,còn dòng điện 3 pha thứ tự ngược tạo
13
ra từ trường quay ngược chiều với rôto .Tốc độ của từ trường thuận th và từ
trường ngược ng so với rôto là :
(0-r) và - (0-r)
Vậy : th = r + (0-r) = 0
ng = r - (0-r) = -0 + 2r
= -0 + 2[(1-s) 0] = 0(1-2s)
Trong đó :
0
-tốc độ đồng bộ
r
-tốc độ rôto
tn , ng -tốc độ từ trường quay thứ tự thuận và thứ tự ngược trong không
gian.
Từ trường thuận quay trong không gian với tốc độ đồng bộ cùng chiều
quay với rôto nên so với từ trường quay của stator thì coi như đứng yên (hai
từ trường cùng quay với một tốc độ thì coi như không chuyển động với
nhau ).Do đó ,từ trường thuận tạo ra một moment quay giống như trường hợp
nối các điện trở đối xứng như ở mạch rôto,(đường đặc tính 1 trên hình 1.8).
14
s
1
0
2
LV
3
Mlõm
0,5
0
1
B
0/2
Mc
M
M’c A
Hình1.8.Các đặc tính cơ khi mở máy với điện
trở không đối xứng ở mạch rôto
Từ trường ngược quay với stator một tốc độ là 0(1-2s) sẽ sinh ra một
sức điện động tần số :
fng = f1 (1-2s)
Trong đó : f1 -Tần số điện lưới .
Dòng điện cảm ứng trong rôto do thành phần từ trường ngược tạo ra sẽ
bị chính từ trường tác dụng một từ lực và tạo ra moment phụ ngược lại
(đường 2 hình 1.8).Moment ngược bằng 0 tại s=1/2 vì khi s=2 ,tốc độ từ
trường ngược ng =0 và không thể có s.đ.đ .Đường moment tạo ra bởi từ
trường ngược có vùng M<0 (1>s>0.5) và vùng M>0 (0.5>s>0) nên đường
moment tổng (đường 3 hình 8) có vùng lõm.
15
Thực nghiệm chứng tỏ ,khoảng lõm moment càng lớn khi điện trở rôto
các pha khác nhau khác nhau càng nhiều .
Nếu moment cản MC
Nếu moment cản M’C >Mlõm thì động cơ khởi động từ điểm A theo
đường 3 tới điểm B thì moment động cơ cân bằng với moment cản (M Đ=MC)
nên động cơ sẽ làm việc tại điểm B với tốc độ =0/2 .Muốn động cơ tiếp tục
tăng lên 0 thì phải đưa các điện trở về đối xứng và cuối cùng loại bỏ tất cả ra
khỏi mạch rôto.
Phương pháp giảm rồi giữ động cơ chạy ở tốc độ thấp ( # 0/2 ) được
dùng trong trường hợp điện trở không đối xứng ở mạch rôto để tiến hành
dừng chính xác động cơ
Phương pháp khởi động và thay đổi nhờ nối điện trở không đối xứng ở
mạch rôto thường dùng với các bộ khống chế có thể tạo ra nhiều cấp tốc độ
với số điện trở không nhiều .
Như trường hợp khởi động với bốn cấp điện trở ở hình hình 1.8f trong
khi dùng phương pháp điện trở không đối xứng chỉ cần tối thiểu 4 điện trở .Sơ
đồ h.1.8 dùng 5 điện trở và khi khởi động ,lần lượt các điện trở được cắt khỏi
mạch rôto là R2 ,R4 ,R1 và R3 ,R5 .Hai điện trở R3 ,R5 được cắt khỏi mạch rôto
cùng một lúc là thuộc cùng một cấp điện trở mở máy .Cắt các điện trở là nhờ
các tiếp điểm K1... K5 đóng lại .
Việc tính toán các điện trở ta không đề cập ở đây.
Ưu điểm: Dùng động cơ rôto dây quấn có thể đạt được moment khởi
động lớn ,đồng thời có dòng điện khởi động nhỏ nên những nơi nào khởi
động khó khăn thì dùng loại này .
Nhược điểm : Động cơ điện rôto dây quấn là rôto dây quấn chế tạo
phức tạp hơn rôto lồng sóc nên đắt hơn ,bảo quản cũng khó khăn hơn ,hiệu
suất của máy cũng thấp hơn.
16
1.5 KHỞI ĐỘNG MỀM.
Khởi động mềm được sử dụng rộng rãi theo nhiều thiết kế và công
nghệ khác nhau .Các công nghệ này đều có đặc điểm chung là khởi động
động cơ ,tuy nhiên chúng có đặc điểm khác nhau rất lớn ở phương pháp sử
dụng và như vậy các phương pháp sẽ có ưu ,nhược điểm khác nhau .Khởi
động mềm có thể chia thành các loại sau:
- Các bộ điều khiển moment.
- Các bộ điều khiển điện áp vòng lặp kín .
- Các bộ điều khiển điện áp vòng lặp hở.
- Các bộ điều khiển dòng điện vòng lặp kín.
Các bộ điều khiển moment tạo ra moment khởi động thấp . Tuỳ thuộc
vào thiết kế mà chúng chỉ điều khiển 1 pha hay 2 pha . Do đó nó không có
khả năng điều khiển dòng khởi động như thường thấy trong các bộ điều khiển
hiện đại.
Các bộ điều khiển moment một pha phải được thiết kế sử dụng thông
qua hệ thống tiếp điểm và bộ điều khiển hạn chế quá tải động cơ . Chúng
thích hợp cho các ứng dụng nhẹ với tần số khởi động thấp và trung bình.Khởi
động ba pha cần được sử dụng cho các khởi động lặp lại hoặc đối với các tải
trọng có quán tính lớn vì bộ điều khiển một pha sẽ tạo ra hiện tượng tăng
nhiệt độ của động cơ trong quá trình khởi động . Quá trình xảy ra do dòng
điện trong cuộn dây động cơ không được bộ điều khiển một pha kiểm soát.
Các bộ điều khiển moment hai pha chỉ được sử dụng với bộ bảo vệ quá
tải động cơ nhưng có thể khởi động và dừng động cơ không qua côngtắctơ.
Tuy nhiên điện áp vẫn còn tác động lên động cơ ngay cả khi động cơ không
hoạt động.
Bộ điều khiển điện áp hở điều khiển tất cả ba pha và có tất cả các ưu
điểm về mặt điện và cơ khí . Các hệ thống này điều khiển điện áp đưa vào
17
động cơ dưới dạng các thông số đã được xác lập trứơc và không có tín hiệu
phản hồi của dòng khởi động . Hệ thống có khả năng điều khiển các tính năng
khởi động cung cấp bằng cách thiết kế các điện áp khởi động ,thời gian tăng
tốc ,thời gian giảm tốc.Dừng mềm cung cấp cho người thiết kế khả năng mở
rộng việc dừng động cơ.
Các bộ điều khiển vòng lặp hở phải được dùng chung với các bảo vệ
quá tải động cơ và nếu cần thiết phải sử dụng công tắc tơ để tạo thành bộ tích
hợp khởi động động cơ .
Các bộ điều khiển điện áp vòng lặp kín là một cải tiến của vòng lặp
hở ,hệ thống nhận tín hiệu phản hồi từ dòng khởi động và sử dụng tín hiệu
này để giảm điện áp khi người sử dụng xác định giá trị tới hạn của dòng
điện .Các thông số về cường độ dòng điện được hệ thống sử dụng cho nhiều
mụch đích khởi động khác nhau .Các chức năng này bao gồm cả khả năng
bảo vệ: quá tải động cơ các pha không cân bằng,dòng điện yếu … và khi đó
hệ thống cung cấp cả hai chức năng khởi động/ngừng và bảo vệ động cơ.
Điều khiển cường độ dòng điện vòng lặp kín là phương pháp hiện đại
nhất cho các loại khởi động mền .Không giống như các bộ điều khiển trên cơ
sở điện áp ,điều khiển cường độ vòng lặp kín sử dụng cường độ dòng điện
như là một giá trị tham số sơ cấp .Các ưu điểm của phương pháp này là khả
năng điều khiển chính xác dòng khởi động và dễ điều chỉnh.Nhiều chế độ do
người sử dụng xác lập trong hệ thống điều khiển điện áp vòng lặp kín có thể
sử dụng cho các hệ thống điều khiển dựa trên cường độ dòng điện.
Khởi động mềm là phương pháp hiệu quả nhất đối với các bộ khởi
động giảm điện áp .Phương pháp này cung cấp tính năng điều khiển tối ưu
cho cả hai đại lượng cường độ dòng điện và điện áp cũng như khả năng bảo
vệ động cơ và giao diện . Say đây em xin giới thiệu qua về bộ khởi động mền
MCD 3000 của hãng DANSFOSS.
18
Khi ng mm MCD 3000 iu khin ba pha cung cp cho ng
c.õy l dng iu khin cng dũng in vũng lp kớn nhm to kh
nng iu khin tt nht.
B khi ng mm MCD 3000 ca DANSFOSS.
K1M
F
T1
L1
B1
nguồn
3 pha
T2
L2
T3
Hỡnh 1.9 S ca MCD 3000
L3
M
B3
Điện áp điều
khiển
cảm biến ngiệt
động cơ
400V
230V
+10
-15
+10
-15
A1
A2
A3
05
E
Đầu vào cảm
biến nhiệt
06
B khi ng mm v dng mm MCD 3000 l b iu khin vi
6 Tiristor,c cp ngun t hai in ỏp ba pha: (200 525)V hoc (200690)V,tn s 50/60Hz v c s dng trong cỏc ng dng tiờu chun v cho
cỏc loi ti nng n .B khi ng cú chc nng iu khin moment khi
ng v dng mm ng c KB ba pha rụto lng súc cú cụng sut t (7.5800)kW cựng vi cỏc chc nng bo v b khi ng ,ng c, giao tip vi
h thng iu khin .Nhng chc nng ny c thit k s dng trong cỏc
ng dng nh : mỏy li tõm,bm ,qut giú,mỏy nộn ,bng ti m ch yu c
s dng trong xõy dng ,thc phm v cụng nghip ung v hoỏ cht .B
iu khin MCD 3000 thc hin thut gii ti u to ra kh nng iu khin
19
linh hoạt mà việc cài đặt lại dễ dàng.Những ưu điểm chính của bộ khởi động
MCD 3000:
- Điều khiển điện áp và cường độ dòng điện mịn không có bước nhảy.
- Điều khiển cường độ và moment đơn giản linh hoạt.
- Có khả năng khởi động liên tục.
- Có khả năng đáp ứng các điều kiện khởi động thay đổi.
- Điều khiển khả năng làm giảm thời gian giảm tốc của động cơ.
- Giảm bớt giá thành vận hành máy do giảm được va đập cơ khí và cải
thiện tính năng khởi động.
- Giảm bớt sự cố trên hệ thống phân phối điện do giảm dòng khởi động
và sụt áp trong thời gian khởi dộng động cơ.
Bộ khởi động MCD 3000 được chỉnh định trước phù hợp với đa số các
ứng dụng tiêu chuẩn sử dụng với mức có thể sử dụng 10 bảo vệ quá tải nhiệt
động cơ ,có thể sử dụng trực tiếp mà không cần chỉnh định thêm trong các
ứng dụng .Các chức năng mặc định như sau: dòng định mức động cơ phụ
thuộc vào giá trị danh định của bộ khởi động ,giới hạn dòng điện : 400%I định
mức
,thời gian gia tốc :15s, moment khởi động ban đầu : 20%M mômen, lựa chọn
kiểu dừng tự do ,bảo vệ nhiệt động cơ: mức 10, thời gian trước khi khởi động
lại : 2s, ngưỡng mất pha động cơ :10%,tần số nguồn : tự động , các đầu vào
logic “run” và “stop” :điều khiển hai dây hoặc ba dây.Tuy nhiên có khả năng
chỉnh định nhờ hiển thị điều chỉnh tuỳ chọn hoặc nối với máy PC ,thay đổi
cấu hình điều chỉnh và giám sát .
Bộ MCS 3000 có các chức năng thực hiện sau:
- Hệ thống điều khiển moment loại trừ (được cấp bằng sáng chế bởi
TRANFOSS
- Điều khiển không thay đổi moment cung cấp tới động cơ trong thời
gian gia tốc và giảm tốc độ.
20
-Bộ khởi động có thể sử dụng côngtắctơ đường vào thời điểm cuối
cùng của quá trình khởi động trong khi duy trì bảo vệ qua tải điện tử .
- Bộ khởi động có thể được nối tới động cơ có cuộn dây đấu tam giác.
- Các chức năng bảo vệ động cơ gồm có: chức năng bảo vệ quá tải
nhiệt động cơ ,xử lí thông tin từ thiết bị cảm biến nhiệt PTC ,theo dõi thời
gian khởi động ,bảo vệ non tải và quá tải trong thời gian vận hành liên tục.
- Các chức năng hợp nhất cảu khối MCD 3000 trong hệ điều khiển
,MCD 3000 có thể được nối trực tiếp với Modbus sử dụng đầu nối RJ45 và
truyền thông sử dụng liên kết nối tiếp RS485 (2 dây) và Modbus RTU
protocol.Chức năng truyền thông cung cấp sự truy cập tới cấu hình ,sự điều
chỉnh điều khiển và báo hiệu các chức năng của bộ khởi động.
1.5.1 Những thuận lợi của khởi động mền so với khởi động sao/tam
giác và khởi động bằng biến áp tự động.
Khởi động mền có lợi hơn so với khởi động Y/ và khởi động bằng
biến áp tự ngẫu.Khởi động Y/ thì hạn chế được dòng khởi động nhưng phát
sinh một moment có hại ,hay xung dòng tức thời khi chuyển từ chế độ Y → .
Hơn thế nữa khởi động Y/ không cho phép kựa chọn giá trị dòng khởi động
tốt nhất.Do đó khi có tải không thể đạt đến giá trị tốc độ định mức trong quá
trình khởi động Y ,do vậy khởi động Y- nhìn chung không hiệu quả.Bộ khởi
động Y- không tác động nên quá trình dừng động cơ ,không điều khiển được
sườn điện áp xuống.
Khởi động bằng biến áp tự ngẫu có khả năng hạn chế dòng khởi động
nhưng đôi khi cho phép một số sự điều khiển vượt quá mức độ dòng khởi
động . Khởi động bằng biến áp tự ngẫu không loại trừ nguy cơ dao động
moment khi tăng dần điện áp.
1.6 KHỞI ĐỘNG BẰNG BIẾN TẦN.
*Sơ đồ khởi động động cơ bằng biến tần.
21
Hình 1.10 Sơ đồ điều khiển động cơ xoay chiều 3 pha
điều khiển bừng biến tần PWM và PLC
Hiện nay biến tần được sử dụng rất rộng rãi trong điều khiển truyền
động điện .Một trong những chức năng của biến tần là khởi động động cơ
bằng nguyên tắc tần số.Khi thực hiện khởi động động cơ bằng biến tần thì
người ta nâng dần tần số nên từ 0 → fđm (f là tần số) làm như vậy tốc độ động
cơ sẽ tăng dần ,đảm bảo đáp ứng về moment trong suốt quá trình khởi động
nhưng lại giữ được dòng khởi động nằm trong giới hạn cho phép ,không gây
nhẩy bậc về dòng điện cũng như về tốc độ . Khi khởi động động cơ bằng tần
số ,người ta phải duy trì tỉ số U/F = const,có nghĩa là phải phụ thuộc vào loại
tải để lựa chọn tỷ số U/F cho thích hợp.Như vậy khởi động bằng phương
pháp thay đổi tần số cũng chính là thay đổi điện áp đặt lên stator của động cơ
theo qui luật như đã trình bày ở trên.
Hình 2.1 trình bày sơ đồ điều khiển động cơ xoay chiều ba pha điều
khiển bằng biến tần PWM và PLC. Tín hiệu từ tay điều khiển được đưa vào
bộ phận mã hoá trạng thái tốc độ rồi được chuyển đến PLC, PLC nhận tín
hiệu đầu vào là DI (Digital Input), qua CPU xử lí thành tín hiệu đầu ra
DO( Digital Output). Tín hiệu đầu ra này được chuyển đến bộ biến tần và
được đưa đến máy cắt MC để có thể dừng động cơ. Mặt khác tín hiệu đầu ra
DO này cũng được đưa đến làm tín hiệu đầu vào DI CPU của bộ biến tần .
Tốc độ của động cơ được đưa qua bộ phận nhận biết tốc độ để đưa vao đầu
vào DI của CPU biến tần, CPU xử lí tín hiệu rồi đưa đến bộ điều khiển dòng
ACR, tín hiệu được đưa đến PWM rồi chuyển đến bộ IGBT để đưa dòng điện
22
và điện áp đến động cơ, ở đây có bộ phận đo dòng điện và đo điện áp rồi
chuyển tới bộ phận tính toán từ thông chuyển đến tín hiệu đầu vào DI.
Chương2
HỆ THỐNG ĐIỆN TRÊN TÀU THUỶ
VỚI CÁC YÊU CẦU VỀ KHỞI ĐỘNG
2.1 LƯỚI ĐIỆN TÀU THUỶ LÀ LƯỚI ĐIỆN "MỀM"
2.1.1 Lưới điện “cứng” trong cung cấp điện
23
Trong cung cấp điện, lưới điện có công suất nguồn vô cùng lớn so với
công suất tiêu thụ của phụ tải như lưới điện của một quốc gia thì khả năng
cung cấp điện luôn giữ được giá trị điện áp và tần số không đổi. Một lưới điện
có điện áp và tần số không đổi thì được gọi là lưới cứng. Với một lưới điện
cứng thì bất cứ một máy phát có giá trị công suất nào cũng có thể tham gia
phát năng lượng lên lưới khi đảm bảo đủ các yêu cầu về làm việc song song.
Khi xét hai máy làm việc song song với nhau thì năng lượng của mỗi máy sẽ
phụ thuộc vào công suất của mỗi máy. Như vậy, với một máy phát công suất
hữu hạn khi làm việc song song với một máy phát có công suất tương đương
rất lớn thì việc phân chia công suất được thực hiện theo tỉ lệ công suất của
mỗi máy.
Nếu kí hiệu :
PNX - là công suất của máy điện đang nghiên cứu
P NZ - là tổng công suất địng mức của các máy còn lại cung
cấp cho tải. Nếu máy phát có P NX rất nhỏ so với máy phát tương đương các
máy phát khác PNZ thì tính chất năng lượng (điện áp và tần số) quyết định bởi
máy phát tương đương có công suất lớn . Tần số và điện áp quyết định bởi
máy phát có công suất lớn, mọi sự thay đổi của máy phát x (kích từ thay đổi
hoặc công suất máy lai thay đổi) không làm thay đổi điện áp và tần số của nó
khi làm việc đồng bộ .Lúc này máy x làm việc ở lưới cứng.
Khi một máy phát công suất nhỏ làm việc song song với lưới cứng mà
thay đổi dòng kích từ nhưng không thay đổi công suất của máy lai, ta chỉ thay
đổi được thành phần phản kháng của dòng điện nghĩa là thay đổi công suất
phản kháng và kết quả là thay đổi hệ số cos.
Tóm lại: Khi máy phát làm việc với lưới cứng nếu chỉ thay đổi kích từ
thì ta chỉ thay đổi được công suất kháng . Nếu chỉ thay đổi công suất máy lai
ta chỉ thay đổi được công suất tác dụng phát ra và điện áp trên cực máy phát
không thay đổi. Như vậy, khi một máy phát làm việc song song với lưới cứng,
tần số và điện áp hoàn toàn phụ thuộc vào lưới, điều chỉnh dòng kích từ cũng
24
như điều chỉnh tốc độ động cơ lai cũng chỉ điều chỉnh khả năng phát công
suất tác dụng cũng như phản kháng của máy phát ra lưới ma thôi.
2.1.2. Lưới điện “mềm” trên tàu thủy
2.1.2.1. đặt vấn đề.
Trên tàu thủy, lưới điện có số lượng hộ tiêu thụ là hữu hạn, phân bố
phụ tải cũng khá đều, trong phạm vi hẹp, các phụ tải đã được tính toán lựa
chọn sẵn và rất ít phát sinh trong quá trình khai thác vì thế phân bố tải trên
các pha được coi là đối xứng hoàn toàn. Phụ tải trên tàu thủy cũng khá đa
dạng, từ phụ tải tĩnh, phụ tải động đến các phụ tải có tính chuyên ngành, tính
hệ thống cao. Tuy vậy, phụ tải tiêu biểu và nặng nề nhất của trạm phát điện là
các động cơ không đồng bộ công suất lớn.Trạm phát của tàu thủy bao gồm
hai hoặc vài hệ diesel – generator làm việc song song với nhau, trạm phát tàu
thủy được thiết kế làm việc độc lập, công suất của trạm không lớn và thậm
chí là không lớn hơn bao nhiêu so với tổng công suất của các phụ tải . Chính
vì lí do này mà điện áp và tần số của lưới điện tàu thủy luôn bị thay đổi đặc
biệt là khi có các động cơ không đồng bộ công suất lớn khởi động. Lưới điện
có u, f = var được gọi là lưới “mềm”. Lưới mềm có các đại lượng u và f luôn
thay đổi nên thường phải có các hệ thống tự động giữ ổn định trong quá trình
làm việc.
2.1.2.2. Lưới điện tàu thuỷ.
Hệ thống điện tàu thuỷ bao gồm trạm phát, lưới điện và các thiết bị tiêu
thụ điện liên kết với nhau thành một hệ thống thực hiện quá trình sản suất
điện năng ,truyền tải điện năng và tiêu thụ điện năng . Lưới điện dùng để
truyền tải và phân phối điện năng từ trạm phát tới các hộ tiêu thụ . Đường dây
truyền tải trên tàu thuỷ thường dùng mức điện áp khá phổ thông : 400 ÷ 500 V
ngoại trừ một vài trường hợp đặc biệt người ta phải sử dụng điện áp cao hơn
nhằm vào mụch đích cụ thể nào đó . Điện áp cao mà tàu thuỷ có thể sử dụng
không quá 1000V và cũng vì lí do an toàn nên trên tàu thuỷ đòi hỏi người
25