Đồ án môn học lý thuyết điều khiển hiện đại
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (809.94 KB, 18 trang )
ĐỒ ÁN MƠN HỌC LÝ THUYẾT ĐIỀU KHIỂN HIỆN ĐẠI
I. TỔNG QUAN
1.1 Đặt vấn đề:
Có nhiều loại động cơ một chiều sử dụng trong cơng nghiệp. động cơ
một chiều sử dụng trong hệ thống điều chỉnh được gọi là động cơ servo một
chiều. Trong động cơ servo một chiều qn roto rất nhỏ, kết quả là động cơ
với tỉ số chuyển đổi momen-qn tính cao có giá thành thấp. Một vài động cơ
servo một chiều có hằng số thời gian rất nhỏ. Động cơ servo một chiều cơng
suất nhỏ được sử dụng trong ác thiết bị và máy tính như động cơ qy đĩa,
động cơ qy ru-lơ máy in,…Động cơ servo một chiều cơng suất trung bình và
lớn được sử dụng trong hệ thống tay máy, hệ thống điều khiển máy tiện,…
Trong đồ án này này sẽ sử dụng phương pháp thiết kế bộ điều khiển
được gọi là kỹ thuật đặt cực hay kỹ thuật gán cực( pole placement or pole
assignnent technique). Chúng ta giả sử rằng tất cả các biến trạng thái là đo
được và có thể lấy tín hiệu phản hồi. Kỹ thuật thiết kế này bắt đầu với việc xác
định các cực vòng kín mong muốn dưa trên đáp ứng q độ hoặc các u cầu
đáp ứng tần số như tốc độ.
1.2 Nội dung thực hiện:
Nội dung của tiểu luận này gồm những phần sau:
• I: Tổng quan, nội dung thực hiện của tiểu luận.
1. Đặt vấn đề
2. Nội dung thực hiện.
3. u cầu thiết kế và biện pháp giải quyết vấn đề
• II: Mô hình toán học mô tả hệ thống
• III: Điều khiển PD
• IV: Thiết kế bộ điều khiển
1. Khi chưa có bộ điều khiển
2. Thiết kế bộ điều khiển dùng phương pháp PD
• V:Kết luận
• VI: Tai liệu tham khảo
1.3 u cầu thiết kế và biện pháp giải quyết vấn đề:
u cầu: Thiết kế một bộ điều khiển sao cho:
Thời gian ổn định = 2sec.
Độ vọt lố Mp= 5%.
Sai số tĩnh là 2%.
Biện pháp giải quyết vấn đề:
Thiết lập mơ hình khơng gian trạng thái cho hệ thống
Thiết kế được bộ điều khiển hệ thống theo u cầu là
dùng phương pháp đặt cực.
Trang 1
ĐỒ ÁN MÔN HỌC LÝ THUYẾT ĐIỀU KHIỂN HIỆN ĐẠI
II. MÔ HÌNH TOÁN HỌC CỦA HỆ THỐNG ĐỘNG CƠ SERVO MỘT CHIỀU
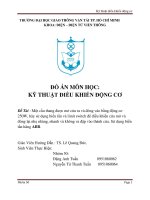
Xét động cơ Servo một chiều được điều khiền phần ứng trong đó dòng
kích từ được giữ không đổi.
Hình1: Sơ đồ động cơ một chiều điều khiển phần ứng
Thông số:
R a : điện trở phần ứng Ra=1Ω
La: điện cảm phần ứng (H)
Ia= dòng điện phần ứng(A)
If= dòng điện kích từ( A)
ea=điện áp đưa vào phần ứng(V)
eb= sức phản điện động (V).
θ= góc quây của trục động cơ (rad)
T= momen điện từ tạo ra bởi động cơ(Nm)
J: Moment quán tính J=0.01Kgm2/s2
B= hệ số ma sát nhớt tương đương của động cơ và tải qui về trục động cơ
b=0.1Nms
k= hằng số moment của động cơ K=0.01Nm/Amp
Moment J tạo ra bởi động cơ tỉ lệ với tích của dòng phần ứng Ia với từ
thông khe khí hay tỉ lệ với dòng kích từ.
T=KfIfKIIG
Với một dòng kích từ không đổi thì từ thông là không đổi cho nên momen T
tỉ lệ trực tiếp với dòng phần ứng.
T=KiG
Nếu dấu của ia thay đổi thì dấu của của momen T cũng đổi kết quả là chiều
quây của động cơ sẽ đổi.
Khi phần ứng đang quây, một điện áp tỉ lệ với tích của từ thông và góc
quây xuất hiện trong phần ứng. Với một từ thông không đổi thì điện áp e b này
dθ
tỉ lệ trực tiếp với tốc độ góc
.
dt
eb = K b
dθ
(1)
dt
Kb=hằng số phản điện động
Tốc độ của động cơ servo một chiều điều khiển phần ứng được điều khiển
bằng điện áp phần ứng ea. Điện áp phần ứng ea là tín hiệu ra của bộ khuếch
đại công suất.
Phương trình vi phân của mạch phần ứng là:
Trang 2
ĐỒ ÁN MÔN HỌC LÝ THUYẾT ĐIỀU KHIỂN HIỆN ĐẠI
di
La a + Ra ia + eb = ea
(2)
dt
Dòng phần ứng tạo ra một momen cân bằng với quán tính và ma sát.
d 2θ
dθ
J 2 +b
= T = Kia
(3)
dt
dt
Đây chính là mô hình toán học của hệ thống
III. XÁC ĐỊNH HÀM TRUYỀN CỦA HỆ THỐNG:
Giả thuyết là tất cả các điều kiện đầu là bằng 0
Lấy ảnh Laplace của (1),(2), (3) chúng ta có phương trình vi phân sau:
K b Sθ ( S ) = E b ( S ) (4)
( La S + Ra ) I a ( S ) + E b ( S ) = E a ( S ) (5)
( JS 2 + bS )θ ( S ) = T ( S ) = KI a ( S )
(6)
θ
(S
)
Xét Ea(S) là tín hiệu vào ,
là tín hiệu ra ta biểu diễn phương trình (4), (5),
(6) qua sơ đồ khối sau:
Ea(s)
+
-
Eb(s)
1
La S + Ra
Ia(s)
T(s)
K
1
S ( JS + b)
(s)
KS
Hình 2: Sơ đồ khối của hệ thống
Động cơ Servo một chiều điều khiển phần ứng tự bản thân nó là một hệ
thống phản hồi ảnh hưởng của sức phản điện động vì thế tăng hiệu quả hãm
của hệ thống
Hàm truyền của động cơ Servo một chiều là:
θ (S )
K
=
E a ( S ) S [( JS + b)( La S + Ra ) + KK b ]
θ (S )
K
(7)
=
⇒
2
E a ( S ) S [ La JS + ( La b + Ra J ) S + Ra b + KK b ]
Điện cảm La trong mạch phần ứng thường nhỏ và có thể bỏ qua khi đó ta có:
Km
θ (S )
=
(8)
E a ( S ) S (Tm S + 1)
K
Km=
: hằng số khuếch đại động cơ
Ra b + KK b
Ra J
Tm =
: hằng số thời gian động cơ
Ra b + KK b
Từ phương trình (7), (8) có thể thấy hàm truyền liên quan đến 1/s. Tức là hệ
thống có thuộc tính tích phân. Trong phương trình (8) để ý rằng hằng số thời
gian của động cơ nhỏ hơn nếu Ra nhỏ và J nhỏ. Với J nhỏ khi điện trở Ra giảm
Trang 3
ĐỒ ÁN MÔN HỌC LÝ THUYẾT ĐIỀU KHIỂN HIỆN ĐẠI
thì hằng số thời gian của động cơ giảm về 0 và điều kiện tác động như một
khâu tích phân lý tưởng.
Sơ đồ khối đơn giản:
Ea(s)
In put
1
s(Tm s + 1)
φ
Out put
Trong đó tốc độ xoay là ngỏ ra và điện áp là ngỏ vào.
Biểu diễn hàm truyền trong Matlap ta thực hiện bằng cách viết m-file như sau:
J=0.01;
b=0.1;
K=0.01;
Kp=0.01;
Ra=1;
den=(Ra*b)+(K*Kp);
num=K/den;
Tm=(Ra*J)/den;
Den=[Tm 1 0];
hamtruyen=tf(num,Den)
Transfer function:
0.0999
-------------0.0999 s^2 + s
Ta có kết quả hàm truyền như sau :
θ (S )
0.0999
=
E a ( S ) 0.0999S 2 + 1
* Đáp ứng bước vòng hở :
Sơ đồ khối vòng hở :
Đáp ứng của động cơ khi ngõ vào được đặt bằng 1 :
Trang 4
ĐỒ ÁN MÔN HỌC LÝ THUYẾT ĐIỀU KHIỂN HIỆN ĐẠI
IV. THIẾT KẾ BỘ ĐIỀU KHIỂN PID KINH ĐIỂN:
Kết hợp 3 tác động điều khiển tỷ lệ, tích phân, vi phân, ta có bộ điều khiển PID
có ưu điểm của cả 3 tác động trên. Phương trình của bộ điều khiển có dạng:
t
K
de(t )
u (t ) = K P e(t ) + P ∫ e(t ) dt + K pTd
TI 0
dt
U (s)
1
= K p [1 +
+ Td s ]
E (s)
Ti s
Với : Td được gọi là hằng số vi phân( thời gian vi phân).
Ti được gọi là hằng số tích phân( thời gian tích phân)
K P được gọi là hệ số khuếch đại tỷ lệ.
w(t )
e(t )
W (s )
E (s )
PID
u (t )
Đối tượng
điều khiển
1
K p [1 +
+ Td s]
Ti s
y (t )
U (s )
1
+ Td s ](1)
Ti s
Các hằng sồ Td , Ti , K P là các thông số của bộ điều khiển. Phương trình (1) có
thể được viết dưới dạng:
K
GC ( s) = K p + i + K d s
s
GC ( s) = K p [1 +
Trang 5
ĐỒ ÁN MÔN HỌC LÝ THUYẾT ĐIỀU KHIỂN HIỆN ĐẠI
K P được gọi là hệ số khuếch đại tỷ lệ.
K i được gọi là hệ số khuếch đại tích phân.
K d được gọi là hệ số khuếch đại vi phân.
Trong trường hợp này K P , K i , K d là các thông số của bộ điều khiển.
Viết lại phương trình chuyển đổi của bộ điều khiển PID:
K
K s 2 + K P s + Ki
GC ( s) = K p + i + K d s = d
s
s
Việc hiệu chỉnh 3 thông số K P , K I và K D sẽ làm tăng chất lượng điều
khiển. Ảnh hưởng 3 thông số này lên hệ thống như sau:
Đ.ứng vòng
kín
(C.L.response)
T.gian tăng
trưởng
(Rise time)
Vọt lố
(Overshoot)
Sai số xác lập
(Steady-State
err.)
Tăng
T.gian quá
độ
(Setting
time)
Ít thay đổi
KP
Giảm
KI
Giảm
Tăng
Tăng
Không xác định
KD
Ít thay đổi
Giảm
Giảm
Thay đổi ít
Ta định nghĩa các thông số trên theo hình vẽ 4:
Trang 6
Giảm
ĐỒ ÁN MÔN HỌC LÝ THUYẾT ĐIỀU KHIỂN HIỆN ĐẠI
• Bộ điều khiển vi tích phân tỉ lệ (PID) khi có hồi tiếp :
Tín hi?u vào
+
•
thông
Nichols.
?
PID
-
Km
Tm S 2 + S
Tín hi?u ra
Hiệu chỉnh thông số của bộ điều khiển PID.
Một phương pháp cổ điển nhưng đơn giản và hiệu qủa để chỉnh định
số K P , K I và K D của bộ điều khiển PID là phương pháp Ziegler-
Đường cong chữ S có thể được đặc tính hoá bởi hai hằng số thời gian,
thời gian trễ L, và hằng số thời gian T, thời gian trễ và hằng số thời gian được
xác định bằng cách vẽ tiếp tuyến tại điểm uốn của đường cong S. Xác định
giao điểm của tiếp tuyến với trục thời gian c(t)=K
Ziegler- Nichols đưa ra qui tắc chỉnh định dựa trên đáp ứng bước của
đối tượng theo bảng:
Trang 7
ĐỒ ÁN MÔN HỌC LÝ THUYẾT ĐIỀU KHIỂN HIỆN ĐẠI
Bộ điều
KP
Ti
khiển
∞
P
T
Td
0
L
PI
PID
T
L
T
1.2
L
0.9
0
2L
0.5L
KP
Ki
K
K d =K P *Td hay Td = d
KP
Thiết kế bộ điều khiển PID theo phương pháp NicholsZiegler.
Trong đó : K P = K i * Ti
•
L
0.3
hay Ti =
III. BIỂU DIỄN KHÔNG GIAN TRẠNG THÁI CỦA HỆ THỐNG:
Trang 8
ĐỒ ÁN MÔN HỌC LÝ THUYẾT ĐIỀU KHIỂN HIỆN ĐẠI
Mô hình không gian trạng thái của hệ thống động cơ một chiều điều khiển
phần ứng có thể thành lập như sau:
1 .
Km
..
θ =
ea
+
θ
Tm
Tm
Đặt biến : x1= θ
.
Trạng thái: x2= θ
Biến vào: u=ea
Biến ra: y= θ =x1
Biểu diễn không gian trạng thái của động cơ điện một chiều:
.
x =A x +Bu
y= Cx
Ta có:
x.1 0 1
x1 0
.
− 1 + Km u
x = . = 0
x2
x 2 Tm Tm
x1
y = [1 0] x 2
Tính toán :
0.01
≈0.1
1 * 0.1 + 0.01 * 0.01
1 * 0.01
Tm =
≈0.1
1 * 0.1 + 0.01 * 0.01
A22=-1/Tm=-10
B2=Km/Tm=1
Hay chương trình m_file xác định ma trận hệ số:
J=0.01;
b=0.1;
K=0.01;
Kp=0.01;
Ra=1;
den=(Ra*b)+(K*Kp);
Km=K/den;
Tm=(Ra*J)/den;
A22=-1/Tm;
B2=Km/Tm;
A=[0 1;0 -1/Tm]
A=
0 1.0000
0 -10.0100
Km=
>> B=[0 Km/Tm]
B=
0
Trang 9
1
ĐỒ ÁN MÔN HỌC LÝ THUYẾT ĐIỀU KHIỂN HIỆN ĐẠI
Vậy ta xác định được:
x.1
1 x1 0
0
.
x = . = 0 − 10 x 2 + 1 u
x 2
x1
[
]
1
0
=
x 2
y
IV. Thiết kế bộ điều khiển kinh điển PID theo phương pháp Nichols-Zigler:
Kết hợp 3 tác động điều khiển tỷ lệ, tích phân, vi phân, ta có bộ điều khiển PID
có ưu điểm của cả 3 tác động trên. Phương trình của bộ điều khiển có dạng:
t
K
de(t )
u (t ) = K P e(t ) + P ∫ e(t ) dt + K pTd
TI 0
dt
U (s)
1
= K p [1 +
+ Td s ]
E (s)
Ti s
Với : Td được gọi là hằng số vi phân( thời gian vi phân).
Ti được gọi là hằng số tích phân( thời gian tích phân)
K P được gọi là hệ số khuếch đại tỷ lệ.
w(t )
e(t )
W (s )
E (s )
PID
u (t )
Đối tượng
điều khiển
1
K p [1 +
+ Td s]
Ti s
y (t )
U (s )
1
+ Td s ](1)
Ti s
Các hằng sồ Td , Ti , K P là các thông số của bộ điều khiển. Phương trình (1) có
thể được viết dưới dạng:
K
GC ( s) = K p + i + K d s
s
K P được gọi là hệ số khuếch đại tỷ lệ.
K i được gọi là hệ số khuếch đại tích phân.
K d được gọi là hệ số khuếch đại vi phân.
Trong trường hợp này K P , K i , K d là các thông số của bộ điều khiển.
Viết lại phương trình chuyển đổi của bộ điều khiển PID:
Ki
K d s 2 + K P s + Ki
GC ( s) = K p +
+ Kd s =
s
s
GC ( s) = K p [1 +
Trang 10
ĐỒ ÁN MÔN HỌC LÝ THUYẾT ĐIỀU KHIỂN HIỆN ĐẠI
Viết chương trình M-file mô phỏng:
J=0.01;
b=0.1;
k=0.01;
kp=0.01;
Ra=1;
num=k;
dd=(Ra*b)+(k*kp);
Km=k/dd;
Tm=(Ra*J)/dd;
den=[Tm 1 0];
Kp=700;
Ki=10;
Kd=20;
numc=[Kd, Kp, Ki];
denc=[1 0];
numa=conv(num,numc);
dena=conv(den,denc);
[numac,denac]=cloop(numa,dena);
step(numac,denac)
title('PID Control with small Ki and Kd')
Kết quả mô phỏng:
Thõa mãn điều kiện đặt ra với Kp=700, Ki=10, Kd=20;
IV. THIẾT KẾ BỘ ĐIỀU KHIỂN
1. Khi chưa có bộ điều khiển:
Dùng Matlab m-file mô phỏng đặc tính của hệ thống :
J=0.01;
b=0.1;
k=0.01;
kp=0.01;
Trang 11
ĐỒ ÁN MÔN HỌC LÝ THUYẾT ĐIỀU KHIỂN HIỆN ĐẠI
Ra=1;
den=(Ra*b)+(k*kp);
Km=k/den;
Tm=(Ra*J)/den;
A22=-1/Tm;
B2=Km/Tm;
A=[0 1;0 -1/Tm]
A=
0 1.0000
0 -10.0100
B=[0;Km/Tm]
B=
0
1
C=[1 0];
D=0;
step(A,B,C,D)
title('Step Response for the Open Loop System')
2. Sử dụng phương pháp đặt cực thiết kế bộ điều khiển cho hệ thống.
Yêu cầu bài toán cần thiết kế:
o Thời gian ổn định = 2sec.
o Độ vọt lố 5%.
o Sai số tĩnh là 2%.
Trang 12
ĐỒ ÁN MÔN HỌC LÝ THUYẾT ĐIỀU KHIỂN HIỆN ĐẠI
Từ các dữ kiện bài toán cho, ta xác định các cực vòng kín mong muốn phù
hợp. (Ta sẽ chọn một cặp cực vòng kín liên hợp phức trội có ξ và
tương
ứng yêu cầu, nên các yêu cầu về tốc độ ổn định sẽ được thoả mãn).
Theo yêu cầu ta có được các tham số tương ứng như sau:
o Thời gian ổn định dưới 2sec.
o Độ vọt lố 5%.
o Sai số tĩnh là 2%.
Biểu thức xác định các thông số trong đáp ứng quá độ hệ thống bậc 2:
Ta có:
⇔
− ln( M pθ ) − ln(0,05)
ξ
=
=
= 0,9522
π
3,1416
1−ξ 2
⇔ ξ 2 = 0,9522(1 − ς 2 )
0,9522 2
⇔ξ =
= 0,477
1 + 0,9522 2
⇒ ωn =
4
= 4,19(rad / sec 2 )
0,477 * 2
Cực phức hệ thống mong muốn được xác định theo biểu thức:
µ1, 2 = −ξωn ± jωn 1 − ξ 2 = −1,999 ± j 3,68
Thiết kế bộ điều khiển với luật điều khiển là
Bước 1: Lập ma trận điều khiển M = [B : AB]
Trang 13
.
ĐỒ ÁN MÔN HỌC LÝ THUYẾT ĐIỀU KHIỂN HIỆN ĐẠI
0
1
1
0
A=
0 −10
với ma trận B=
Suy ra:
1
0
1 −10
M=
Ta có: Det (M)= -1 ≠ 0 Hạng của ma trận n=2, cho nên hệ thống điều khiển
được hoàn toàn trạng thái.
Bước 2: Phương trình đặc tính của hệ thống là:
−1
1 0 0 1 S
2
2
SI − A = S
−
=
0 − 10 0 S + 10 =S(S+10)=S +10S=S +a1S+a2
0
1
⇒ a1=10
a2=0
Bước 3: Xác định ma trận chuyển T chuyển phương trình trạng thái của hệ
thống thành dạng chuẩn tắc điều khiển được.
Ta có: T=MW
Với:
1
0
1 −10
M=
a1
W=
1
1 10
=
0 1
0
T=MW=
1
1
0
1 10 1 1 0
=
=I
− 10 1 0 0 1
Bước 4: Từ giá trị riêng mong muốn
µ1, 2 = −1,999 ± j 3,68
ta được phương
trình đặc tính mong muốn của hệ thống là:
Ta có :
(S-µ1)(S-µ2) = (S+1,999+j3,68)(S+1,999-j3,68)
= S2 + 3,998S + 17,538
= S2 + α 1 S + α 2
=> α1 = 3,998
α 2 =17,538
Bước 5: Ma trận hệ số phản hồi trạng thái yêu cầu K có thể được xác định như
sau:
−1
K= [α 2 − a 2 α1 − a1 ]T =[17,538-0: 3,998-10]I =[17,538 - 6,002]
Vậy K = [ 17,538 - 6,002]
Tín hiệu điều khiển u trong trường hợp này là:
u=-Kx=-17,538x1+6,002x2
Mô phỏng Matlab m-file của hệ thống vòng kín mà đã thiết kế bộ điều khiển:
J=0.01;
Trang 14
ĐỒ ÁN MÔN HỌC LÝ THUYẾT ĐIỀU KHIỂN HIỆN ĐẠI
b=0.1;
k=0.01;
kp=0.01;
Ra=1;
den=(Ra*b)+(k*kp);
Km=k/den;
Tm=(Ra*J)/den;
A22=-1/Tm;
B2=Km/Tm;
A=[0 1;0 -1/Tm]
B=[0;Km/Tm]
C=[1 0]
D=0;
p1 = -1.999 + 3.68i;
p2 = -1.999 - 3.68i;
K =place(A,B,[p1 p2])
t=0:0.01:3;
step(A-B*K,B,C,D,1,t)
title('Step Response with a K controller')
Từ mô phỏng trên ta nhận thấy rằng thời gian ổn định t s đã thõa mãn
yêu cầu đặt ra là 2s, tuy nhiên biên độ ra vẫn còn quá nhỏ để biên độ ra mong
muốn ổn định bằng 1 chúng ta cần đặt vào hệ thống một giá trị độ lợi Nbar
như hình sau:
Trang 15
ĐỒ ÁN MÔN HỌC LÝ THUYẾT ĐIỀU KHIỂN HIỆN ĐẠI
Chúng ta có thể tìm thừa số Nbar bằng cách dùng Matlab command rscale như
sau:
function[Nbar]=rscale(A,B,C,D,K)
% Given the single-input linear system:
%
.
%
x = Ax + Bu
%
y = Cx + Du
% and the feedback matrix K,
%
% the function rscale(A,B,C,D,K) finds the scale factor N which will
% eliminate the steady-state error to a step reference
% using the schematic below:
%
%
/---------\
%
R
+
u |.
|
%
---> N --->() ---->| X=Ax+Bu |--> y=Cx ---> y
%
-|
\---------/
%
|
|
%
|<---- K <----|
%
%8/21/96 Yanjie Sun of the University of Michigan
%
under the supervision of Prof. D. Tilbury
%
s = size(A,1);
Z = [zeros([1,s]) 1];
N = inv([A,B;C,D])*Z';
Nx = N(1:s);
Nu = N(1+s);
Nbar=Nu + K*Nx;
Mô phỏng Matlab m-file của hệ thống vòng kín có thêm giá trị Nbar vào bộ
điều khiển:
J=0.01;
b=0.1;
k=0.01;
kp=0.01;
Ra=1;
Trang 16
ĐỒ ÁN MÔN HỌC LÝ THUYẾT ĐIỀU KHIỂN HIỆN ĐẠI
den=(Ra*b)+(k*kp);
Km=k/den;
Tm=(Ra*J)/den;
A22=-1/Tm;
B2=Km/Tm;
A=[0 1;0 -1/Tm]
B=[0;Km/Tm]
C=[1 0]
D=0;
p1 = -1.999 + 3.68i;
p2 = -1.999 - 3.68i;
K =place(A,B,[p1 p2])
Nbar=rscale(A,B,C,D,K)
t=0:0.01:3;
step(A-B*K,B*Nbar,C,D,1,t)
title('Step Response with a K controller and Nbar')
V. KẾT LUẬN
Từ mô phỏng trên thì bộ điều khiển đạt được các yêu cầu đặt ra, tuy nhiên
để tối ưu hơn có thể dùng lý thuyết điều khiển hiện đại khác để thiết kế như
điều khiển mờ, điều khiển thích nghi, điều khiển nơron...để so sánh kết quả.
Do hạn chế kiến thức matlab nên đồ án này chỉ dùng m-file viết chương
trình và mô phỏng hệ thống, vì vậy để mô phỏng rỏ hơn chúng ta có thể dùng
simulink trong ngôn ngữ matlab.
Trang 17
ĐỒ ÁN MƠN HỌC LÝ THUYẾT ĐIỀU KHIỂN HIỆN ĐẠI
VI. TÀI LIỆU THAM KHẢO
1. Bài giảng lý thuết điều khiển tự động
Ts. Trần Hồi An, 1998
2. Matlab và ứng dụng trong điều khiển
Nguyễn Đức Thành, 2004
3. Lý thuyết điều khiển hiện đại,Ts. Nguyễn Thò Phương Hà, 1999.
4. Modern Control Engineering (Third Edition), Katsuhiko Ogata, Prentical
Hall, 1997.
Trang 18