AAE556 Lecture04Divergence2011
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (194.37 KB, 22 trang )
AAE 556
Aeroelasticity
Lecture 4
Reading: 2.8-2.12
4-1
Purdue Aeroelasticity
Agenda
i
Review static stability
– Concept of perturbations
– Distinguish stability from response
i
Learn how to do a stability analysis
i
Find the divergence dynamic pressure using a “perturbation” analysis
4-2
Purdue Aeroelasticity
Perturbed airfoil
i
In flight this airfoil is in static equilibrium at the fixed angle θ but what happens
if we disturb (perturb) it?
∆L = qSCLα ( ∆θ )
lif t + perturbation lif t
∆θ
αo+θ
MS=KT(θ+∆θ)
torsion spring
KT
V
i
There are three possibilities
4-3
Purdue Aeroelasticity
Example
i
Perturb the airfoil when it is in static equilibrium
i
To be neutrally stable in this new perturbed position this equation
must be an true
(K
T
) (
− qSeCL θ + KT − qSeCL
α
α
) ( ∆θ ) = qSeC
4-4
Purdue Aeroelasticity
Lα
αo
The 1 DOF divergence condition
i
( KT − qSeCLα ) ( ∆θ ) = 0
Neutral stability
KT = qD SeCLα
i
KT
qD =
SeCLα
or
4-5
Purdue Aeroelasticity
Observations
i
The equation for neutral stability is simply the usual static equilibrium equation with
right-hand-side (the input angle αo) set to zero.
i
The neutral stability equation describes a special case
–
–
only deformation dependent external (aero) and internal (structural) loads are present
these loads are “self-equilibrating” without any other action being taken
4-6
Purdue Aeroelasticity
Stability investigation
i
Take a system that we know is in static equilibrium (forces and moments sum to zero)
K h
0
i
Kh
0
i
i
0 h
− qSC Lα
K T θ
0
0
− 1 h
− 1
0
= qSC Lα α o + qScCMAC
e θ
e
1
Perturb the system to move it to a different, nearby position (that may or may not be in static equilibrium)
0 h + ∆h
− qSC Lα
KT θ + ∆θ
0
0
−1 h + ∆h (?)
−1
= qSCLα α o + qScCMAC
e θ + ∆θ
e
Is this new, nearby state also a static equilibrium point?
Kh
0
0
− qSCLα
KT
0
0
−1 ∆h (?) 0
=
e ∆θ 0
Static equilibrium equations for stability are those for a self-equilibrating system
7
Purdue Aeroelasticity
0
1
Neutral stability
i
Neutral stability is only possible if the system is “self-equilibrating.”
Kh
0
0
− qSCLα
KT
0
0
−1 ∆h 0
=
e ∆θ 0
i
The internal and external loads created by deformation just balance each other.
i
The system static stiffness is zero.
i
We’ll see that this requires that the system aeroelastic matrix become singular (the determinant is zero).
8
Purdue Aeroelasticity
The deformations at neutral stability are eigenvectors of the
problem
i
At neutral stability the deformation is not unique (∆θ is not zero - can be plus or
minus with indeterminate amplitude)
i
At neutral static stability the system has many choices (equilibrium states) near
its original equilibrium state.
– wing position is uncontrollable - it has no displacement preference when a
load is applied.
4-9
Purdue Aeroelasticity
For stability, only system stiffness is important. This graph shows where the equilibrium point for twist is located
M shear
center
M structure = KT θ
Structural
Aero overturning
resistance
M aero = qSeCLα ( α o + θ )
Slope depends on qSCLa
Equilibrium point
twist θ
4-10
Purdue Aeroelasticity
When we perturb the twist angle we move to a different position on the graph. One
of the moments will be larger than the other/
M structure = KT θ
M shear
∆θ
center
M aero = qSeCLα ( α o + θ )
Equilibrium point
twist θ
4-11
Purdue Aeroelasticity
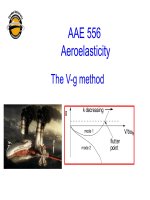
The slope of the aero line is a function of dynamic pressure so the line rotates as speed increases.
This is a plot of the lines right at divergence.
M aero = qDiv SeCLα ( α o + θ )
M shear
Lines are parallel
M structure = KT θ
center
The equilibrium point lies at infinity
twist θ
4-12
Purdue Aeroelasticity
When the dynamic pressure is larger than the divergence dynamic pressure the crossing point is
negative. This is mathematics way of telling you that you are in trouble.
M shear
M aero = qSeCLα ( α o + θ )
center
M structure = KT θ
twist θ
4-13
Purdue Aeroelasticity
Let’s examine how aeroelastic stiffness changes with increased dynamic pressure
(K
T
)
− qSeCLα θ = Le + M AC = M SC
The standard definition of stiffness is as follows
∆M SC ∂ M SC
=
= K effective = K e
∆θ
∂θ
M sc
K effective = KT − qSeCL
α
twist θ
Aeroelastic stiffness decreases as q increases
4-14
Purdue Aeroelasticity
As we approach aeroelastic divergence we get twist amplification
i
Consider the single degree of freedom typical section and the expression for
twist angle with the initial load due to αo
i
neglect wing camber
qSeCL α o
qα o
θ=
=
KT ( 1 − q ) 1 − q
α
4-15
Purdue Aeroelasticity
Write this expression in terms of an infinite series
qαo
θ=
1− q
∞
1
2
3
n
qα o
÷ = qα o 1 + q + q + q + ... = 1 + ∑ q ÷
n =1
1− q
4-16
Purdue Aeroelasticity
The first term is the uncorrected value of twist angle with no aeroelasticity
θ = qα o ( 1 + q + q + ...)
2
Plot the relative sizes of terms
1
with qbar=0.5
0.75
q bar = 0.5
0.5
the sum of the infinite series is 2
0.25
0
1
2
3
4
5
4-17
Purdue Aeroelasticity
6
7
Let’s take a look at the series and explain it as an aeroelastic feedback
process
θ = qα o ( 1 + q + q + ...)
2
θo is the twist angle with no aero
load/structural response "feedback"
θo =
qSeC L α o
α
KT
4-18
Purdue Aeroelasticity
Write the series slightly differently
θo =
qSeC L α o
α
KT
θ = θ o ( 1 + q + q + ...)
2
θ = θ o + qθ o + q θ o + ...
2
4-19
Purdue Aeroelasticity
The second term is the response to the first term
θ1 = q θ o =
qSeC L θ o
α
KT
This is the response to angle of attack θo instead of αo
…and, the third term
θ 2 = q θ o = q θ1
2
4-20
Purdue Aeroelasticity
Conclusion
Each term in the series represents a feedback "correction" to the twist created
by load interaction
∞
θ = θ 0 + ∑θ n
n =1
n
θ = θ o 1 + ∑ q
n =1
∞
Series convergence
q <1
Series divergence
q ≥1
4-21
Purdue Aeroelasticity
Summary
i
Divergence condition is a neutral stability condition
i
Divergence condition can be found using the original equilibrium
conditions
i
Stability does not depend on the value of the applied loads
4-22
Purdue Aeroelasticity