SLIDE CHƯƠNG 2 LÝ THUYẾT ĐIỀU KHIỂN TỰ ĐỘNG :Mô hình toán học của hệ thống tuyến tính liên tục
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (1.31 MB, 65 trang )
Chương 2:
Mô hình toán học của hệ thống
tuyến tính liên tục
Automatic Control Systems
1
CHƯƠNG 2: MÔ HÌNH TOÁN HỌC CỦA CÁC HỆ THỐNG LIÊN TỤC
Khái niệm về mô tả toán học của một hệ thống
Mô hình toán học: hệ các phương trình toán học mô tả đặc
tính của hệ thống một gần chính xác nhất
Phương pháp xây dựng
Phương pháp lý thuyết
Phương pháp thực nghiệm
Các dạng mô hình toán học
Hàm truyền đạt (Transfert function)
Phương trình trạng thái (State space variable)
Sơ đồ khối (Block Diagram)
2
Automatic Control Systems
2
CHƯƠNG 2: MÔ HÌNH TOÁN HỌC CỦA CÁC HỆ THỐNG LIÊN TỤC
Hàm truyền đạt của hệ thống (Transfert function)
1.
Định nghĩa: tỉ số giữa tín hiệu và và tín hiệu vào biểu
diễn theo toán tử Laplace, kí hiệu G(s)
U(s)
G(s)
Y(s)
3
Automatic Control Systems
3
CHƯƠNG 2: MÔ HÌNH TOÁN HỌC CỦA CÁC HỆ THỐNG LIÊN TỤC
Hàm truyền đạt của hệ thống
2.
Xác định hàm truyền đạt
• Xét cho hệ SISO (Single input single output)
U(s)
G(s)
Y(s)
4
Automatic Control Systems
4
CHƯƠNG 2: MÔ HÌNH TOÁN HỌC CỦA CÁC HỆ THỐNG LIÊN TỤC
Hàm truyền đạt của hệ thống
2.
Xác định hàm truyền đạt
• Nguyên tắc chung:
• B1: Xây dựng phương trình vi phân mô tả đặc tính của đối tượng (hê thống)
thông qua mối quan hệ giữa tín hiệu vào và tín hiệu ra: áp dụng các định
luật vật lý
• B2: Biến đổi Laplace 2 vế của phương trình vi phân để đưa về dạng hàm
truyền đạt theo định nghĩa
5
Automatic Control Systems
5
CHƯƠNG 2: MÔ HÌNH TOÁN HỌC CỦA CÁC HỆ THỐNG LIÊN TỤC
Hàm truyền đạt của hệ thống
2.
Xác định hàm truyền đạt
• Biểu thức tổng quát
a n y ( n ) a n 1 y ( n 1) ... a1 y a 0 y bm u ( m ) bm 1u ( m 1) ... b1u b0 u
(n m).
Dạng tổng quát của hàm truyền
b m s m b m 1 s m 1 ... b1 s b 0
Y (s)
G (s)
U (s)
a n s n a n 1 s n 1 ... a 1 s a 0
6
Automatic Control Systems
6
CHƯƠNG 2: MÔ HÌNH TOÁN HỌC CỦA CÁC HỆ THỐNG LIÊN TỤC
Hàm truyền đạt của hệ thống
3. Một số tính chất quan trọng của hàm truyền đạt
b m s m b m 1 s m 1 ... b1 s b 0
Y (s)
G (s)
U (s)
a n s n a n 1 s n 1 ... a 1 s a 0
Important properties
G(s) chỉ xác định cho hệ thống tuyến tính bất biến theo thời gian
G(s) biểu diễn tỉ số biến đổi Laplace của tín hiệu ra và tín hiệu vào
Giả thiết các điều kiện ban đâu bằng 0.
G(s) không phụ thuộc tín hiệu vào của hệ thống
G(s) của một hệ thống liên tục là hàm đa thức theo biến phức s
7
Automatic Control Systems
7
CHƯƠNG 2: MÔ HÌNH TOÁN HỌC CỦA CÁC HỆ THỐNG LIÊN TỤC
Bài tập
• Tìm hàm truyền đạt của hệ thống có phương trình vi phân sau
Automatic Control Systems
8
CHƯƠNG 2: MÔ HÌNH TOÁN HỌC CỦA CÁC HỆ THỐNG LIÊN TỤC
Bài tập
• Tìm hàm truyền đạt của sơ đồ V0(s) / Vi(s)
Automatic Control Systems
9
CHƯƠNG 2: MÔ HÌNH TOÁN HỌC CỦA CÁC HỆ THỐNG LIÊN TỤC
Sơ đồ khối mô tả hệ thống
1. Khái niệm
10
Automatic Control Systems
10
CHƯƠNG 2: MÔ HÌNH TOÁN HỌC CỦA CÁC HỆ THỐNG LIÊN TỤC
Sơ đồ khối mô tả hệ thống
1. Khái niệm
Xây dựng cấu trúc sơ đồ khối của hệ thống
11
Automatic Control Systems
11
CHƯƠNG 2: MÔ HÌNH TOÁN HỌC CỦA CÁC HỆ THỐNG LIÊN TỤC
Sơ đồ khối mô tả hệ thống
1. Khái niệm
12
Automatic Control Systems
12
CHƯƠNG 2: MÔ HÌNH TOÁN HỌC CỦA CÁC HỆ THỐNG LIÊN TỤC
Sơ đồ khối mô tả hệ thống
1. Khái niệm
13
Automatic Control Systems
13
CHƯƠNG 2: MÔ HÌNH TOÁN HỌC CỦA CÁC HỆ THỐNG LIÊN TỤC
Sơ đồ khối mô tả hệ thống
2. Ý nghĩa:
Block Diagram
Giúp hiểu rõ hơn về vị trí và mối quan hệ giữa các thành phần bên
trong hệ thống
Mô tả quan hệ nguyên nhân – hệ quả thông qua hệ thống
Biểu diễn các phương trình của hệ thống trong miền thời gian
14
Automatic Control Systems
14
CHƯƠNG 2: MÔ HÌNH TOÁN HỌC CỦA CÁC HỆ THỐNG LIÊN TỤC
Sơ đồ khối mô tả hệ thống
3. Đại số sơ đồ khối
Mắc nối tiếp:
G (s)
Y (s)
G 1 ( s ) .G 2 ( s )
R (s)
Mắc song song
Y ( s)
G(s)
G1 ( s) G2 ( s )
R( s)
15
Automatic Control Systems
15
CHƯƠNG 2: MÔ HÌNH TOÁN HỌC CỦA CÁC HỆ THỐNG LIÊN TỤC
Sơ đồ khối mô tả hệ thống
3. Đại số sơ đồ khối
Mắc hồi tiếp:
Y (s)
G1 ( s )
G(s)
R ( s ) 1 G1 ( s )G2 ( s )
16
Automatic Control Systems
16
CHƯƠNG 2: MÔ HÌNH TOÁN HỌC CỦA CÁC HỆ THỐNG LIÊN TỤC
Bài tập
• Tìm hàm truyền đạt của hệ thống có sơ đồ
Automatic Control Systems
17
CHƯƠNG 2: MÔ HÌNH TOÁN HỌC CỦA CÁC HỆ THỐNG LIÊN TỤC
Bài tập
Rút gọn sơ đồ sau
Automatic Control Systems
18
CHƯƠNG 2: MÔ HÌNH TOÁN HỌC CỦA CÁC HỆ THỐNG LIÊN TỤC
Bài tập
Tìm hàm truyền đạt của hệ thống trong sơ đồ sau
Automatic Control Systems
19
CHƯƠNG 2: MÔ HÌNH TOÁN HỌC CỦA CÁC HỆ THỐNG LIÊN TỤC
Bài tập
Tìm hàm truyền đạt của hệ thống trong sơ đồ sau
Automatic Control Systems
20
CHƯƠNG 2: MÔ HÌNH TOÁN HỌC CỦA CÁC HỆ THỐNG LIÊN TỤC
Sơ đồ khối mô tả hệ thống
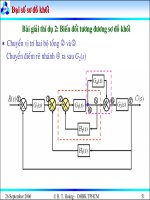
3. Đại số sơ đồ khối: Rút gọn sơ đồ khối
Chuyển một điểm từ sau ra trước một khối
Y ( s ) A ( s )G 2 ( s )
B( s ) G1 ( s ) Y( s )
Chuyển một điểm từ trước ra sau một khối
Y(s) A(s)G2 (s)
B( s ) G1 ( s ) A( s )
Automatic Control Systems
21
CHƯƠNG 2: MÔ HÌNH TOÁN HỌC CỦA CÁC HỆ THỐNG LIÊN TỤC
Sơ đồ khối mô tả hệ thống
3. Đại số sơ đồ khối: Rút gọn sơ đồ khối
Chuyển một khối so sánh từ sau ra trước một khối
Y(s) A(s)G 2 (s) B(s)G1 (s)
Automatic Control Systems
22
CHƯƠNG 2: MÔ HÌNH TOÁN HỌC CỦA CÁC HỆ THỐNG LIÊN TỤC
Sơ đồ khối mô tả hệ thống
3. Đại số sơ đồ khối: Rút gọn sơ đồ khối
Chuyển một khối so sánh từ trước ra sau một khối
Y ( s ) A ( s ) G 2 ( s ) B (s) G 1 ( s ) G 2 ( s )
Automatic Control Systems
23
CHƯƠNG 2: MÔ HÌNH TOÁN HỌC CỦA CÁC HỆ THỐNG LIÊN TỤC
Bài tập
Rút gọn sơ đồ sau
Automatic Control Systems
24
CHƯƠNG 2: MÔ HÌNH TOÁN HỌC CỦA CÁC HỆ THỐNG LIÊN TỤC
Sơ đồ khối mô tả hệ thống
Ví du:
Automatic Control Systems
25