Nghiên cứu thiết kế hệ thống truyền động servo dùng động cơ không đồng bộ
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (3.52 MB, 104 trang )
Vò V¡N TRäNG
BỘ GIÁO DỤC VÀ ĐÀO TẠO
TRƯỜNG ĐẠI HỌC BCH KHOA H NI
--------------------------------------
Vũ Văn Trọng
NGNH IN
NGHIÊN CứU THIếT Kế Hệ THốNG TRUYềN Động
servo dùng động cơ không đồng bộ
KHóa: 2002-2004
LUẬN VĂN THẠC SĨ NGÀNH ĐIỆN
Hà Nội -2004
BỘ GIÁO DỤC VÀ ĐÀO TẠO
TRƯỜNG ĐẠI HỌC BÁCH KHOA H NI
--------------------------------------
Vũ Văn Trọng
NGHIÊN CứU THIếT Kế Hệ THốNG TRUYềN Động
servo dùng động cơ không đồng bộ
Chuyên ngnh: Tự động ho¸
LUẬN VĂN THẠC SĨ NGÀNH ĐIỆN
NGƯỜI HƯỚNG DẪN KHOA HỌC:
TS. Nguyễn văn Liễn
H Ni, 2004
LỜI CẢM ƠN
Để hồn thành được Luận văn này, ngoµi s n lc ca bn
thân, tôi cũng nhn c s giúp rt qúy báu ca các thy cô
giáo trong B môn Tự động hóa XNCN - Trng HBK H Ni.
Tôi xin chân thnh cm n s hng dn nhit tình ca
thy giáo hng dn khoa hc: TS. Nguyễn Văn Liễn - B môn
Tự động hóa XNCN.
Xin chân thnh cm ơn Trung t©m Đào tạo & Bồi dưỡng
sau Đại học - Trng HBK H Ni, ban lÃnh đạo Công ty và
các cán bộ phòng Dự án - Công ty Kỹ thuật điện Vạn Việt đà tạo
điều kiện cho tôi hoàn thành bản luận văn này.
Tác gi Lun vn
Vũ văn trọng
1
Mục lục
Trang
Trang phụ bìa
Mục lục
Danh mục các ký hiệu và các chữ viết tắt .............................................................. 4
T
1
2
T
1
2
Lời mở đầu ............................................................................................................. 6
T
1
2
21T
Chương 1: tổng quan về đckđb trong không gian véc tơ .. 8
T
1
2
T
1
2
1.1. Mô tả động cơ không đồng bộ ................................................................... 8
T
1
2
T
1
2
1.1.1. Lịch sử ra đời của động cơ không đồng bộ ........................................ 8
21T
T
1
2
1.1.2. Nguyên lý hoạt động của ĐCKĐB xoay chiều ba pha ...................... 8
21T
T
1
2
1.1.3. ứng dụng, ưu điểm và nhược điểm của ĐCKĐB xoay chiều ba pha . 9
21T
T
1
2
1.2. Mô hình toán học động cơ không đồng bộ xoay chiều ba pha ................ 10
T
1
2
T
1
2
1.2.1. Các biểu thức điện áp ....................................................................... 10
21T
T
1
2
1.2.2. PhÐp chun ®ỉi tun tÝnh Park ..................................................... 11
21T
T
1
2
1.2.3. Các phương trình ma trận điện áp .................................................... 12
21T
T
1
2
1.3. Không gian véc tơ và mô hình toán học của ĐCKĐB trong không gian
T
1
2
véc tơ ............................................................................................................ 13
21T
1.3.1. Véc tơ không gian dòng điện ........................................................... 14
21T
T
1
2
1.3.2. Véc tơ không gian từ thông móc vòng ............................................. 16
21T
T
1
2
1.3.3. Véc tơ không gian của các điện áp stator và rotor ........................... 18
21T
T
1
2
1.3.4. Dạng véc tơ không gian của các biểu thức toán học mô tả động cơ 19
21T
T
1
2
1.4. Các biểu thức tính mô men điện từ .......................................................... 22
T
1
2
T
1
2
1.4.1. Biểu thức tính mô điện từ dựa trên cơ sở cân bằng năng lượng ....... 23
21T
T
1
2
1.4.2. Hằng số mô men .............................................................................. 23
21T
T
1
2
Chương 2 : điều khiển tần số và điều khiển véc tơ không
T
1
2
gian động cơ không đồng bộ ........................................................... 24
T
1
2
2.1. Các hệ truyền động biến tần bán dẫn động cơ không đồng bộ................ 24
T
1
2
Cao học Tự động hóa Khóa 2002
Nội
T
1
2
Đại học Bách khoa Hà
2
2.1.1. HƯ trun ®éng ®iƯn tèc ®é thay ®ỉi................................................ 24
21T
T
1
2
2.1.2. Hệ truyền động - động cơ không đồng bộ xoay chiều ba pha ......... 26
21T
T
1
2
2.1.3. Cuộc cách mạng của các hệ truyền động chất lượng cao ................ 26
21T
T
1
2
2.2. Biến tần bán dẫn ...................................................................................... 28
T
1
2
21T
2.2.1. Cấu trúc biến tần bán dẫn ................................................................ 28
21T
T
1
2
2.2.2. Phương pháp PWM thông thường .................................................... 30
21T
T
1
2
2.2.3. Phương pháp PWM điều chế véc tơ không gian .............................. 32
21T
T
1
2
2.2.4. So sánh hai phương pháp điều chế ................................................... 35
21T
T
1
2
2.3. Chiến lược điều khiển động cơ không đồng bộ ....................................... 35
T
1
2
T
1
2
2.3.1. Điều khiển theo luật điện áp/tần số (U/f) ........................................ 35
21T
T
1
2
2.3.2. §iỊu khiĨn tùa theo tõ trêng .......................................................... 38
21T
T
1
2
2.3.3. NhËn xÐt chung ................................................................................ 42
21T
21T
Chương 3 : phương pháp điều khiển trực tiếp mô men .......... 45
T
1
2
T
1
2
3.1. Điều khiển khiển trực tiếp mô men ......................................................... 45
T
1
2
T
1
2
3.1.1. Khái niệm điều khiển trực tiếp mô men .......................................... 45
21T
T
1
2
3.1.2. Sơ đồ nguyên lý điều khiển trực tiếp mô men ................................. 45
21T
T
1
2
3.2.Điều khiển trực tiếp mô men theo bảng chọn ........................................... 48
T
1
2
T
1
2
3.2.1. Sơ đồ nguyên lý ............................................................................... 48
21T
21T
3.2.2. Ước lượng từ thông stator và mô men ............................................. 49
21T
T
1
2
3.2.3. Phương pháp DTC cơ sở (Classical DTC c_DTC) ...................... 52
21T
T
1
2
3.2.4. Phương pháp DTC cải tiến (modified DTC m_DTC) ................. 54
21T
T
1
2
3.2.4. Phương pháp DTC với bảng chọn 12 sector (12_DTC) ................... 55
21T
T
1
2
3.2.5. Phương pháp DTC với bảng chọn theo điểm làm việc..................... 57
21T
T
1
2
3.2.6. Phương pháp DTC cải tiến số 2 (m2_DTC) ..................................... 58
21T
T
1
2
3.3. Nâng cao chất lượng điều khiển trực tiếp mô men .................................. 59
T
1
2
T
1
2
3.3.1. Phương pháp dự báo ......................................................................... 59
21T
T
1
2
3.3.2. Phương pháp áp dụng logic mờ........................................................ 60
21T
T
1
2
3.3.3. Điều chỉnh từ thông tối ưu ............................................................... 62
21T
Cao học Tự động hóa Khóa 2002
Nội
T
1
2
Đại học Bách khoa Hà
3
3.4. Mô phỏng hệ truyền động điều khiển trực tiếp mô men ......................... 64
T
1
2
T
1
2
3.4.1. Chuẩn bị mô phỏng .......................................................................... 64
21T
T
1
2
3.4.2. Ước lượng từ thông và mô men ...................................................... 65
21T
T
1
2
3.4.3. Điều khiển trực tiếp mô men dùng cảm biến tốc độ ........................ 68
21T
T
1
2
3.4.4. Đánh giá chung về hệ truyền động điều khiển trực tiếp mô men .... 74
21T
T
1
2
Chương 4 : hệ truyền động vị trí đckđb ........................................ 76
T
1
2
T
1
2
4.1. Bộ điều khiển chun ®éng - HƯ trun ®éng servo ............................... 76
T
1
2
T
1
2
4.1.1. Giíi thiệu về bộ điều khiển servo .................................................... 76
21T
T
1
2
4.1.2. Ramp vị trÝ ....................................................................................... 77
21T
21T
4.1.3. Bé ®iỊu chØnh PID ............................................................................ 79
21T
T
1
2
4.1.4. Bé ®iỊu khiĨn servo.......................................................................... 81
21T
T
1
2
4.2. HƯ trun ®éng vÞ trÝ øng dụng điều khiển trực tiếp mô men ................. 83
T
1
2
T
1
2
4.2.1. Hệ truyền động vị trí động cơ không đồng bộ ................................. 83
21T
T
1
2
4.2.2. Sơ đồ nguyên lý hệ truyền động vị trí điều khiển trực tiếp mô men
21T
dùng động cơ không đồng bé .................................................................... 84
T
1
2
4.3. øng dơng bé ®iỊu khiĨn vi xư lý tín hiệu số TMS230F240 điều khiển
T
1
2
động cơ xoay chiều ba pha ........................................................................... 85
T
1
2
4.3.1. Giải pháp dùng bộ điều khiển DSP điều khiển động cơ .................. 85
21T
T
1
2
4.3.2. Bộ điều khiển DSP - TMS320F240 .................................................. 86
21T
T
1
2
4.3.3. KiÕn tróc cđa bé ®iỊu khiển DSP - TMS320F240............................ 87
21T
T
1
2
4.3.4. Sơ đồ nguyên lý hệ truyền động vị trí điều khiển mô men trực tiếp
21T
dùng DSP ................................................................................................... 89
21T
4.4. Mô phỏng hệ thống truyền động vị trí ..................................................... 91
T
1
2
T
1
2
4.4.1. Chuẩn bị mô phỏng .......................................................................... 91
21T
T
1
2
4.4.2. Kết qủa điều khiển vị trí sử dụng ramp tuyến tính .......................... 93
21T
T
1
2
4.4.3. NhËn xÐt .......................................................................................... 97
21T
21T
KÕt ln ................................................................................................................ 98
T
1
2
21T
Tµi liƯu tham khảo ................................................................................................ 99
T
1
2
21T
Cao học Tự động hóa Khóa 2002
Nội
Đại học Bách khoa Hà
4
Danh mục các ký hiệu và các chữ viết tắt
a
i ri (t)
R
:
:
:
R
ir
:
i si (t) :
:
is
i 'r
R
R
:
:
:
:
:
:
:
:
:
:
:
:
:
:
:
:
:
:
:
:
:
:
Toán tử 1200.
Dòng điện pha rotor.
Véc tơ dòng điện rotor biểu diễn trong hệ tọa độ rotor.
P
P
Véc tơ dòng điện rotor biểu diễn trong hệ tọa độ stator.
Dòng điện pha stator.
Véc tơ dòng điện stator biĨu diƠn trong hƯ täa ®é stator.
p
P
Rr
Rs
s
1/s
te
t pc
Ts = Tz
u ri (t) :
:
ur
Véc tơ dòng điện stator biểu diễn trong hệ tọa độ rotor.
Điện cảm từ hóa ba pha.
Điện cảm ba pha rotor tổng.
Điện cảm tự cảm rotor.
Điện cảm móc vòng rotor.
Điện cảm tự cảm stator.
Điện cảm từ hóa rotor.
Điện cảm ba pha stator tổng.
Điện cảm tự cảm stator.
Điện cảm từ hóa stator.
Điện cảm móc vòng stator.
Điện cảm hỗ cảm giữa các dây quấn rotor.
Điện cảm hỗ cảm giữa giữa các dây quấn stator.
Giá trị điện cảm hỗ cảm cực đại giữa stator và rotor.
Toán tử vi phân.
Số đôi cực.
Điện trở rotor.
Điện trở stator.
Độ trượt.
Toán tử tích phân.
Mô men điện từ tức thời.
Phần trăm của mô men tức thời so với mô men danh định.
:
Thời gian lấy mẫu.
Điện áp pha rotor.
Véc tơ không gian điện áp rotor biểu diễn trên hệ tọa độ rotor.
:
u si (t) :
:
us
Véc tơ không gian điện áp rotor biểu diễn trên hệ tọa độ stator.
Điện áp pha stator.
Véc tơ không gian điện áp stator biểu diễn trên hệ tọa độ stator.
:
Véc tơ không gian điện áp stator biểu diễn trên hệ tọa độ rotor.
is'
Lm
Lr
R
R
R
R
Lr
L r1
R
R
Ls
L rm
Ls
R
R
R
R
Ls
L sm
L s1
R
R
R
R
Mr
Ms
M sr
R
R
R
R
R
R
R
R
R
R
R
R
R
R
u 'r
R
u s'
R
Cao häc Tù ®éng hãa Khóa 2002
Nội
Đại học Bách khoa Hà
5
m
:
Tốc độ góc rotor.
pc :
Phần trăm tốc độ tức thời so với tốc độ danh định.
r
:
Tần số góc điện rotor.
s
:
Tần số góc điện stator.
r
:
Góc pha của véc tơ không gian từ thông móc vòng rotor so với trục
thực (nằm ngang) của hệ tọa độ gắn với stator.
s
:
Góc pha của véc tơ không gian từ thông móc vòng stator so với trục
thực (nằm ngang) của hệ tọa độ gắn với stator.
m
:
Góc giữa rotor so với stator.
r
:
Góc điện rotor.
s
:
Góc điện stator.
ri (t) :
Từ thông móc vòng trên dây quấn rotor.
:
Véc tơ không gian từ thông móc vòng rotor biểu diễn trên hệ tọa độ
r
rotor.
:
Véc tơ không gian móc vòng từ thông rotor biểu diễn trên hệ tọa độ
'r
stator.
si (t) :
Từ thông móc vòng trên dây quấn stator.
:
Véc tơ không gian từ thông móc vòng stator biểu diễn trên hệ tọa
s
độ stator.
:
Véc tơ không gian móc vòng từ thông stator biểu diễn trên hệ tọa
s'
độ rotor.
/ :
Các trục tọa độ của hệ tọa độ gắn với rotor.
D/Q :
Các trục tọa độ của hệ tọa độ gắn với stator.
g
:
Hệ tọa ®é tỉng qu¸t.
x/y :
C¸c trơc täa ®é cđa hƯ täa ®é tỉng qu¸t.
m
:
Tõ hãa.
r
:
Rotor.
s
:
Stator.
ra, rb, rc
:
C¸c pha rotor.
sA, sB, sC :
Các pha stator.
ĐCKĐB
:
Động cơ không đồng bộ xoay chiều ba pha.
R
R
R
R
R
R
R
R
R
R
R
R
R
R
R
R
R
R
R
R
R
R
Cao học Tự động hóa Khóa 2002
Nội
Đại học Bách khoa Hµ
6
Lời mở đầu
Do những ưu điểm của hệ truyền động servo như khả năng gia tốc tăng
tốc, giảm tốc nhanh, tốc độ lớn, điều khiển chính xác vị trí. Các hệ truyền động
servo đà được sử dụng rất nhiều trong thực tế như trong ngành sản xuất thiết bị
điện tử; trong các dây chuyền lắp ráp, sản xuất các sản phẩm cần tối ưu về thời
gian và chuyển động chính xác vị trí; trong các robot, tay máy công nghiệp;
trong các thiết bị điện tử dân dụng, v.v Các động cơ điện được sử dụng trong
các hệ truyền động đó thường là các động cơ servo công suất nhỏ, bao gồm cả
loại động cơ servo một chiều và loại động cơ servo xoay chiều. Trong đó loại
động cơ servo một chiều được sử dụng nhiều trong các ngành công nghiệp do
những ưu điểm về công suất và khả năng điều khiển. Còn các động cơ servo xoay
chiều được sử dụng nhiều trong các thiết bị điện tử dân dụng do các ưu điểm về
kích thước, không gây nhiễu điện tử và khả năng tốc độ cao.
Tuy nhiên do những yêu cầu trong sản xuất công nghiệp và đời sống mà
các hệ truyền động servo vẫn tiếp tục được nghiên cứu để nâng cao hơn nữa chất
lượng, khả năng ứng dụng với các động cơ servo có công suất lớn hơn và hệ
truyền động đơn giản hơn. Các hệ truyền động xoay chiều đà và đang hoàn thiện,
cùng với sự trợ giúp và phát triển của các thiết bị điện tử, vi xử lý mạnh và những
ưu điểm của các động cơ xoay chiều. Nên hướng nghiên cứu xây dựng hệ truyền
động servo cho các động cơ xoay chiều không phải là các động cơ servo truyền
thống cũng được quan tâm nhằm thỏa mÃn các yêu cầu trên, trong đó có động cơ
không đồng bộ xoay chiều ba pha. Chính vì lý do này mà luận văn tốt nghiệp đÃ
chọn đề tài có tên Nghiên cứu, thiết kế hệ truyền động servo dùng động cơ
không đồng bộ để nghiên cứu.
Nội dung của luận văn nhằm đạt được vấn đề hệ thống lại và so sánh các
hệ truyền động điều khiển tần số và véc tơ động cơ không đồng bộ như hệ thống
truyền động điều khiển theo luật điện áp/tần số, điều khiển tựa theo từ thông
rotor và điều khiển trực tiếp mô men. Đề tài tập trung vào hệ truyền động điều
khiển trực tiếp mô men cho chất lượng servo; xây dựng, mô phỏng, so sánh và
Cao học Tự động hóa Khóa 2002
Nội
Đại học Bách khoa Hà
7
đánh giá một số phương pháp điều khiển trực tiếp mô men với nhau và với các hệ
truyền động tiên tiến khác. Đề tài cũng tập trung vào việc xây dựng các bộ điều
khiển servo cho hệ truyền động điều khiển vị trí, xây dựng hệ truyền động vị trí
cho động cơ không đồng bộ ứng dụng phương pháp điều khiển trực tiếp mô men
và giải pháp ứng dụng bộ điều khiển xử lý tín hiệu số.
Do năng lực của người làm đề tài và thời gian có hạn nên mong muốn của
đề tài là các kết qủa nghiên cứu lý thuyết. Các kết qủa đó, cùng với những đầu tư
về thời gian, phương tiện kỹ thuật và các hỗ trợ khác sẽ là cơ sở để phát triển tiếp
đề tài; đưa đề tài vào thử nghiệm và ứng dụng trong thực tế sau này.
Tác giả luận văn
Vũ Văn Trọng
Cao học Tự động hóa Khóa 2002
Nội
Đại học Bách khoa Hµ
8
Chương 1
Tổng quan về động cơ không đồng bộ trong
không gian véc tơ
1.1. Mô tả động cơ không đồng bộ
1.1.1. Lịch sử ra đời của động cơ không đồng bộ
Các động cơ điện được phát minh vào năm 1820 khi mà Hans Christian
Oersted đà khám khá ra sự ảnh hưởng của từ trường dòng điện. Một năm sau đó,
Michael Faraday đà khám phá ra trường điện từ quay và động cơ một chiều đầu
tiên đà ra đời. Faraday tiếp tục khám phá ra cảm ứng điện từ vào năm 1831
nhưng mÃi tới năm 1883 thì Tesla mới phát minh ra động cơ không đồng bộ xoay
chiều. Ngày nay các động cơ điện gồm hai loại chính động cơ một chiều và động
cơ xoay chiều, động cơ điện xoay chiều lại gồm động cơ đồng bộ và động cơ
không đồng bộ. Cho đến tận ngày nay tất cả chúng được sinh ra đều dựa trên các
lý thuyết của Oersted, Faraday và Tesla, mặc dù các lý thuyết này đà được khám
phá và phát minh từ lâu.
Cấu trúc của các động cơ không đồng bộ gồm hai phần chính, phần stator
đứng yên và phần rotor quay. Động cơ không đồng bộ có thể phân ra thành loại
động cơ một pha, loại động cơ ba pha. Hoặc có thể phân thành hai loại cơ bản
khác là loại động cơ không đồng bộ rotor lồng sóc và loại động cơ không đồng
bộ rotor dây quấn.
1.1.2. Nguyên lý hoạt động của động cơ không đồng bé xoay chiỊu ba pha
Khi cÊp ngn ®iƯn xoay chiỊu ba pha cho các cuộn dây stator, sẽ sinh ra
các dòng điện xoay chiều; các dòng điện này sinh ra từ trường quay có từ thông
stator quay bằng tốc độ góc điện của nguồn cấp. Đồng thời từ trường stator này
làm cảm ứng ra các dòng điện vòng trong các thanh dẫn rotor (đối với loại rotor
Cao học Tự động hóa Khóa 2002
Nội
Đại học Bách khoa Hà
9
lồngs sóc) hoặc các cuộn dây rotor (đối với loại rotor dây quấn). Các dòng điện
rotor này đặt trong từ trường stator quay nên sinh ra lực điện từ (lực Lorentz),
tổng các lực tạo mô men làm quay rotor, rotor quay cùng hướng với từ trường
stator quay. Lúc đầu khi từ trường stator đà được sinh ra thì rotor tăng tốc nhanh
để cố gắng bắt kịp từ trường quay đó, đồng thời từ trường quay quét qua rotor
càng giảm nên sức điện động cảm ứng phía rotor sẽ giảm dần và dòng điện rotor
cũng giảm theo. Nếu tốc độ rotor bằng tốc độ từ trường quay thì lúc đó sẽ không
có lực điện từ được sinh ra và rotor lại quay chậm lại. Do đó tốc độ rotor không
thể bằng tèc ®é ®ång bé, tèc ®é ®ång bé phơ thc vào tần số nguồn điện cấp và
số đôi cực của động cơ, sai khác giữa hai tốc độ đó gọi là tốc độ trượt.
1.1.3. ứng dụng, ưu điểm và nhược điểm của động cơ không đồng bộ xoay
chiều ba pha
Các động cơ không đồng bộ hay động cơ cảm ứng là rẻ tiền, dễ dàng sản
xuất, dễ bảo dưỡng, không cần vành chuyển mạch điện và chổi than, là loại động
cơ được sử dụng rộng rÃi nhất. Chúng có mô men quán tính và trọng lượng nhỏ,
hiệu suất cao, khả năng qúa tải lớn và vững chắc. Ngoài ra các động cơ không
đồng bộ có thể làm việc trong các môi trường dễ cháy nổ vì chúng không có khả
năng đánh lửa. Do các ưu điểm này mà các động cơ không đồng bộ đà được ưu
tiên quan tâm tìm hiểu như là bộ biến đổi năng lượng điện cơ.
Các động cơ không đồng bộ cũng có nhiều nhược điểm, như tốc độ của
chúng phụ thuộc vào tần số và biên độ điện áp của nguồn cấp mà trong thực tế
nhiều lúc năng lượng cơ lại yêu cầu với các tốc độ có thể thay đổi được. Chúng
có thể chạy ở tốc độ gần hằng số đối với tải từ không tải tới đầy tải. Điều này
không giống như các động cơ điện một chiều, các động cơ không đồng bộ gặp
khó khăn để điều khiển tách bạch các thành phần dòng điện sinh mô men và từ
thông. Để nâng cao hiệu qủa sử dụng thì hệ truyền động động cơ không đồng bộ
thay đổi tốc độ có khả năng cấp cho động cơ điện áp ba pha có tần số và biên độ
có thể thay đổi được, nên bộ điều khiển phức tạp hơn so với loại một chiều.
Cao học Tự động hóa Khóa 2002
Nội
Đại học Bách khoa Hµ
10
1.2. Mô hình toán học động cơ không đồng bộ xoay
chiều ba pha
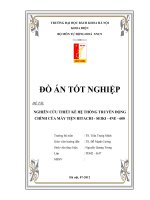
Các giả thiết khi xây dựng mô hình toán học của động cơ không đồng bộ:
- Động cơ không đồng bộ là loại máy điện hai cực đối xứng và có ba cuộn
dây cho ba pha.
- Các tổn hao do khe hở không khí được bỏ qua.
- Độ từ thẩm của lõi sắt là vô hạn.
- Mật độ từ thông được phân bố, tỏa ra trong khe hở không khí.
- Các tổn hao sắt từ được bỏ qua.
- Mỗi cuộn dây stator và rotor được coi như là một cuộn dây đơn bước đủ
nhiều vòng dây.
sA
sC
sB
sB
ra rb
rc
rb
ra
sC
sA
Hình 1.1 - Mặt cắt ngang của máy điện ba pha đối xứng
1.2.1. Các biểu thức điện áp
- Điện áp pha stator:
- §iƯn ¸p pha rotor:
u sA = R Si sA ( t ) +
dψ sA ( t )
dt
(1.1a)
u sB = R Si sB ( t ) +
dψ sB ( t )
dt
(1.1b)
u sC = R Si sC ( t ) +
dψ sC ( t )
dt
(1.1c)
u ra = R r i ra ( t ) +
Cao häc Tù ®éng hãa – Khãa 2002
Néi
dψ ra ( t )
dt
(1.2a)
Đại học Bách khoa Hà
11
u rb = R r i rb ( t ) +
dψ rb ( t )
dt
(1.2b)
u rc = R r i rc ( t ) +
dψ rc ( t )
dt
(1.2c)
- C¸c giá trị từ thông móc vòng của từng pha stator:
sA = L s i sA + M s i sB + M s i sC + M sr cos θ m i ra + M sr cos(θ m + 2π / 3)i rb + M sr cos(θ m + 4π / 3)i rc
ψ sB = M s i sA + L s i sB + M s i sC + M sr cos(θ m + 4π / 3)i ra + M sr cos θ m i rb + M sr cos(θ m + 2π / 3)i rc
ψ sC = M s i sA + M s i sC + L s i sC + M sr cos(θ m + 2π / 3)i ra + M sr cos(θ m + 4π / 4)i rb + M sr cos θ m i rc
(1.3 a, b,c)
- Các giá trị từ thông móc vßng cđa tõng pha rotor:
ψ ra = M sr cos(−θ m )i sA + M sr cos(−θ m + 2π / 3)i sB + M sr cos(−θ m + 4π / 3)i sC + L r i ra + M r i rb + M r i rc
ψ rb = M sr cos(−θ m + 4π / 3)i sA + M sr cos(−θ m )i sB + M sr cos(−θ m + 2π / 3)i sC + M r i ra + L r i rb + M r i rc
ψ rc = M sr cos(−θ m + 2π / 3)i sA + M sr cos(−θ m + 4π / 3)i sB + M sr cos(−θ m )i sC + M r i ra + M r i rb + L r i rc
(1.4a,b,c)
- BiĨu diƠn díi d¹ng ma trËn ta cã:
u sA R s + p L s
u p M s
sB
u sC p M s
=
u ra p M sr cos θ m
u
rb p M sr cos θ m 2
u rc p M sr cos θ
m1
pM s
pM s
R s + pLs
pM s
pM s
R s + pLs
p M sr cos θ m1 p M sr cos θ m 2
p M sr cos θ m p M sr cos θ m1
p M sr cos θ m 2 p M sr cos θ m
p M sr cos θ m p M sr cos θ m1 p M sr cos θ m 2 i
sA
p M sr cos θ m 2 p M sr cos θ m p M sr cos θ m1 i sB
p M sr cos θ m1 p M sr cos θ m 2 pM sr cos θ m i sC
.
i ra
pM r
pM r
R r + pL r
i rb
pM r
R r + pL r
pM r
i
rc
R r + pL r
pM r
pM r
(1.5)
1.2.2. PhÐp chuyển đổi tuyến tính Park
r
sB
rb
ra
m
sA
s
r m
sD
sC
rc
Hình 1.2 - Sơ đồ phép chuyển đổi tương đương về mặt vật lý
Cao học Tự động hóa Khóa 2002
Nội
Đại học Bách khoa Hà
12
1 / 2 1 / 2
u sA
u s 0
1/ 2
u sD = c.cos θ cos(θ − 2π / 3) cos(θ + 2π / 3) .u sB
− sin θ − sin(θ − 2π / 3) − sin(θ + 2π / 3) u
u sQ
sC
(1.6)
u
1 / 2 cos θ
− sin θ
u sA
s0
u = c. 1 / 2 cos(θ − 2π / 3) − sin(θ − 2π / 3) .u
sD
sB
u sC
cos(θ + 2π / 3) − sin(θ + 2π / 3) u sQ
1 / 2
(1.7)
Trong đó c là hằng số, c=2/3 hoặc c=1 cho trường hợp không có sự cân bằng
công suất; c= 2 / 3 cho trường hợp đảm bảo cân bằng công suất.
Có thể biểu diễn các giá trị điện áp trên hệ tọa độ (D, Q) và hệ tọa độ (, ) như
sau:
u sD R s + pL s
u sQ = L s pθs
u rα pL m
u rβ L m (pθs − P.ωm )
− L m (P.ωm + pθ r ) i sD
i
R s + pL s
L m (P.ωm + pθ r ) pL m
. sQ (1.8)
i sα
− L r pθ r
− L m (pθs − P.ωm ) R r + pL r
R r + pL r
L R pθ r
pL m
i sβ
− L s pθs
pL m
3
2
Trong ®ã: L s = L s - M s ; L r = L r − M r ; L m = M sr
1.2.3. Các phương trình ma trận điện áp
1.2.3.1. Hệ tọa độ gắn vào stator
Khi đó s = 0 và r = - ωm .
R
R
R
R
R
u sD R s + pL s
u sQ = 0
u rd pL m
u rq − P.ωm L m
R
i sD
i
. sQ
i sd
− P.ωm L r R r + pL r i sq
0
pL m
0
R s + pL s 0
pL m
P.ωm L m R r + pL r P.ωm L r
pL m
(1.9)
1.2.3.2. Hệ tọa độ gắn vào rotor: r = 0 vµ ωs = ωm .
R
u sD R s + pL s
u
sQ = L s Pωm
u rd pL m
u rq 0
R
R
R
R
R
− L m Pωm i sD
i
R s + pL s L m Pωm pL m
. sQ
i sd
R r + pL r 0
0
R r + pL r i sq
pL m
0
− L s Pωm pL m
Cao học Tự động hóa Khóa 2002
Nội
(1.10)
Đại học Bách khoa Hà
13
1.2.3.3. Hệ tọa độ gắn vào từ trường đồng bộ: ωr = s.ω s
R
u sD R s + pL s
u
sQ = L s ωs
u rd pL m
u rq L s sωs
R
R
− L m ωs i sD
i
R s + pL s L m ωs
pL m
. sQ
− L s sωs R r + pL r − L r sωs i sd
L r sωs
R r + pL r i sq
pL m
− L s ωs
pL m
(1.11)
1.3. Không gian véc tơ và mô hình toán học của động cơ
không đồng bộ trong không gian véc tơ
Không gian véc tơ cho phép chuyển đổi các giá trị tự nhiên của hệ thống
ba pha trên mặt phẳng phức đặt song song với mặt cắt ngang của động cơ. Trong
mặt phẳng phức này, tốc góc quay của véc tơ không gian bằng tần số góc của hệ
thống nguồn ba pha.
sB
s
m
ra
rb
s
r
r
sA
sC
rc
Hình 1.3 - Mặt cắt động cơ chỉ còn hai cuộn dây quay của mạch
stator và rotor tương đương
Để chuyển mô hình động cơ không đồng bộ từ hệ tọa độ tự nhiên ra dạng véc tơ
trong không gian người ta dïng to¸n tư:
a=e
j2 π
3
;a2 = e
j4 π
3
;
VÝ dơ vÐc tơ không gian dòng điện stator:
[
is = c. 1.isA ( t ) + a.isB ( t ) + a 2 .isC ( t )
Cao häc Tù ®éng hãa – Khãa 2002
Nội
]
(1.12)
Đại học Bách khoa Hà
14
Trong đó:
+ c=2/3 được sử dụng trong trường hợp biên độ véc tơ không gian cân bằng với
các biên độ cđa c¸c pha cđa hƯ thèng ba pha.
+ c= 2 / 3 được sử dụng trong trường hợp cân bằng công suất giữa một hệ thống
ba pha so với một hệ thống hai pha tương đương.
1.3.1. Véc tơ không gian dòng điện
- Các trục D và Q thuộc hệ tọa độ tĩnh gắn vào stator; D là trục thực và Q là trục
ảo.
- Các trục và thuộc hệ tọa độ quay gắn vào rotor; là trục thực và là trục
ảo.
sQ
sA
sC
sB
m
ra
rc
rb
sB
m
r
rc
sD
ra
sC
sA
Hình 1.4 - Mặt cắt ngang của động cơ KĐB, với các hệ trục
tọa độ gắn trên stator và rotor
- Véc tơ dòng điện stator khi c=2/3:
[
]
2
is = . 1.isA ( t ) + a.isB ( t ) + a 2 .isC ( t ) = i s .e j
3
(1.13)
Trên hệ tọa độ D - Q:
is = isD ( t ) + j.isQ ( t )
Cao học Tự động hóa Khóa 2002
Nội
(1.14 a)
Đại học Bách khoa Hµ
15
2
Re(i s ) = Re (i sA + ai sB + a 2 i sC ) = i sD
3
2
Im(i s ) = Im (i sA + ai sB + a 2 i sC ) = i sQ
3
(1.14 b,c)
2
Re(is ) = Re (isA + aisB + a 2isC ) = isA
3
2
Re(a 2 is ) = Re (a 2isA + isB + aisC ) = isB
3
(1.15 a,b,c)
2
Re(a is ) = Re (aisA + a 2isB + isC ) = isC
3
- Véc tơ dòng điện rotor khi c=2/3:
[
]
2
i r = . i ra ( t ) + a.i rb ( t ) + a 2 .i rc ( t ) = i r .e j
3
(1.16)
Trên hệ tọa độ D - Q:
i 'r = i r .e j( α+θm )
(1.17)
i r = i rα ( t ) + j.i rβ ( t )
(1.18 a)
Trên hệ tọa độ -:
2
Re(i r ) = Re (i ra + ai rb + a 2i rc ) = i rα
3
2
Im(i r ) = Im (i ra + ai rb + a 2i rc ) = i rβ
3
2
Re(i r ) = Re (i ra + ai rb + a 2i rc ) = i ra
3
2
Re(a 2 i r ) = Re (a 2i ra + i rb + ai rc ) = i rb
3
(1.18 b,c)
(1.19 a,b,c)
2
Re(a i r ) = Re (ai ra + a 2i rb + i rc ) = i rc
3
- Véc tơ dòng điện từ hóa trên hệ täa ®é D - Q:
N
.i '
i m = is + re
N se r
Cao häc Tù ®éng hãa – Khóa 2002
Nội
(1.20)
Đại học Bách khoa Hà
16
1.3.2. Véc tơ không gian từ thông móc vòng
1.3.2.1. Véc tơ không gian từ thông móc vòng stator
s =
(
2
sA + aψ sB + a 2 ψ sC
3
)
(1.21)
i sA (L s + a.M s + a 2 .M s ) + i sB (M s + a.L s + a 2 .M s ) + i sC (M s + a.M s + a 2 .L s ) +
+ i ra M sr cos θ m + a M sr cos(θ m + 4π 3 ) + a 2 M sr cos(θ m + 2π 3 ) +
2
(1.22)
ψs =
3 + i rb M sr cos(θ m + 2π ) + a M sr cos θ m + a 2 M sr cos(θ m + 4π ) +
3
3
+ i M cos(θ + 4π ) + a M cos(θ + 2π ) + a 2 M cos θ
m
sr
m
sr
m
3
3
rc sr
(
(
(
)
)
)
BiÕn ®ỉi ta cã:
i sA (L s + a.M s + a 2 .M s ) + a.i sB (a 2 .M s + L s + a.M s ) + a 2 .i sC (a.M s + a 2 .M s + L s ) +
+ i ra M sr cos θ m + a M sr cos(θ m + 4π 3 ) + a 2 M sr cos(θ m + 2π 3 ) +
2
ψs =
3 + a.i rb a 2 .M sr cos(θ m + 2π ) + M sr cos θ m + a.M sr cos(θ m + 4π ) +
3
3
2
2
+ a .i a.M cos(θ + 4π ) + a .M cos(θ + 2π ) + M cos θ
rc
sr
m
sr
m
sr
m
3
3
(
(
)
(
)
)
(1.23)
BiÕn ®ỉi tiÕp cã:
(
)
ψ s = (L s + a.M s + a 2 .M s ).i s + M sr cos θ m + a.M sr cos(θ m + 4π ) + a 2 .M sr cos(θ m + 2π ) .i r
3
3
= (L s − M s ).i s + 1.5 cos θ m M sr .i r = (L s − M s ).i s + 1.5M sr i r e jθm = (L s − M s ).i s + 1.5M sr .i 'r
= L s .i s + L m i 'r
(1.24)
L s là điện cảm tổng ba pha stator.
R
R
L m là điện cảm từ hóa tổng ba pha.
R
R
i 'r là dòng điện rotor trên hệ trục tọa độ cố định D - Q.
1.3.2.2. Véc tơ không gian từ thông móc vòng rotor biểu diễn trên hệ tọa độ
D-Q
s = sD + j.ψ sQ
ψ sD = L s i sD + L m i rD
Cao häc Tù ®éng hãa – Khóa 2002
Nội
(1.25 a,b,c)
Đại học Bách khoa Hà
17
ψ sQ = L s i sQ + L m i rQ
Trong đó dòng điện rotor được biểu diễn trên hƯ täa ®é D - Q:
i 'r = i rD + j.i rQ = i r .e jθm
(1.26)
1.3.2.3. VÐc t¬ không gian từ thông móc vòng rotor
r =
(
2
ra + aψ rb + a 2 ψ rc
3
)
(1.27)
i ra (L r + a.M r + a 2 .M r ) + i rb (M r + a.L r + a 2 .M r ) + i rc (M r + a.M r + a 2 .L r ) +
+ i sA M sr cos θ m + a M sr cos(θ m + 2π 3 ) + a 2 M sr cos(θ m + 4π 3 ) +
2
(1.28)
ψr =
3 + i sB M sr cos(θ m + 4π ) + a M sr cos θ m + a 2 M sr cos(θ m + 2π ) +
3
3
+ i M cos(θ + 2π ) + a M cos(θ + 4π ) + a 2 M cos θ
m
sr
m
sr
m
3
3
sC sr
(
(
(
)
)
)
i ra (L r + a.M r + a 2 .M r ) + a.i rb (a 2 .M r + L r + a.M r ) + a 2 .i rc (a.M r + a 2 .M r + L r ) +
+ i sA M sr cos θ m + a M sr cos(θ m + 2π 3 ) + a 2 M sr cos(θ m + 4π 3 ) +
2
ψr =
3 + a.i sB a 2 .M sr cos(θ m + 4π ) + M sr cos θ m + a.M sr cos(θ m + 2π ) +
3
3
+ a 2 .i a.M cos(θ + 2π ) + a 2 .M cos(θ + 4π ) + M cos θ
sC
sr
m
sr
m
sr
m
3
3
(
(
)
(
)
)
(1.29)
(
)
ψ r = (L r + a.M r + a 2 .M r ).i r + M sr cos θ m + a.M sr cos(θ m + 2π ) + a 2 .M sr cos(θ m + 4π ) .i s
3
3
= (L r − M r ).i r + 1.5 cos θ m M sr .i s = (L r − M r ).i r + 1.5M sr i s e − jθm = (L r − M r ).i r + 1.5M sr .i s'
= L r .i r + L m i s'
(1.30)
L r là điện cảm tổng ba pha rotor.
R
R
L m là điện cảm từ hóa tổng ba pha.
R
R
i s' là dòng điện stator trên hệ trục tọa ®é α-β.
- BiĨu diƠn trªn hƯ täa ®é α-β:
ψ r = ψ rα + j.ψ rβ
(1.31)
ψ rα = L r i rα + L m i sα
(1.32 a,b)
ψ rβ = L r i rβ + L m i sβ
Cao häc Tự động hóa Khóa 2002
Nội
Đại học Bách khoa Hà
18
- Biểu diễn trên hệ tọa độ tĩnh D - Q:
ψ 'r = ψ rD + jψ rQ = ψ r e jθm = (ψ rα + jψ rβ )e jθm
(1.33)
ψ 'r = L r i 'r + L m i s' .e jθm = L r i 'r + L m i s
(1.34)
i s = i s' e jθm
ise
− jθm
=i
(1.35 a,b)
'
s
i s = i sD + ji sQ
(1.36 a,b)
i s' = i sα + ji sβ
i s = i s .e jθ
(1.37 a,b)
i s' = i s' .e jα = i s' .e j( θ−θm ) = i s .e jm
r
sQ
is , is
'
r r
m
m
sD
Hình 1.5 - Véc tơ không gian dòng điện stator biểu diễn trên hệ
tọa độ gắn vào stator và trên hệ tọa độ quay gắn vào rotor
1.3.2.4. Véc tơ không gian từ thông móc vòng stator biểu diễn trên hệ tọa độ
-
s' = s .e − jθm = (L s i s + L m i 'r ).e − jθm = (L s i s' + L m i r )
(1.38)
1.3.3. VÐc t¬ không gian của các điện áp stator và rotor
u s được biểu diễn trên hệ tọa độ D - Q.
u r được biểu diễn trên hệ tọa độ -.
Cao học Tự động hóa Khóa 2002
Nội
Đại học Bách khoa Hà
19
[
]
2
2
1
1
1
u sA ( t ) + a.u sB ( t ) + a 2 .u sC ( t ) = u sD + ju sQ = (u sA − u sB − u sC ) + j
(u sB − u sC )
3
3
2
2
3
2
2
1
1
1
u r = u ra ( t ) + a.u rb ( t ) + a 2 .u rc ( t ) = u rα + ju rβ = (u ra − u rb − u rc ) + j
(u rb u rc )
3
3
2
2
3
us =
[
]
(1.39)
Tính các giá trị thực điện áp pha có thể sử dụng các biểu thøc sau:
u sA = Re(u s )
u sA = Re(a u s )
(1.40 a,b,c)
u sA = Re(a 2 u s )
1.3.4. Dạng véc tơ không gian của các biểu thức toán học mô tả động cơ
1.3.4.1. Các biểu thức điện áp dạng véc tơ không gian trong hệ tọa độ tổng
quát
sQ
r
y
x
g
g
g
r r
m
m
sD
Hình 1.6 - Biên độ của véc tơ không gian và góc quay
của nó trên các hệ tọa độ khác nhau
Mạch stator:
- Dòng điện stator: i sg = i s e − jθ = i sx + ji sy
(1.41)
- §iƯn ¸p stator: u sg = u s e − jθ = u sx + ju sy
(1.42)
g
g
- Tõ th«ng mãc vßng stator: ψ sg = ψ s e − jθ = sx + j sy
g
(1.43)
Mạch rotor
- Dòng điện rotor: i rg = i r e − j( θ −θ ) = i rx + ji ry
(1.44)
- Điện áp rotor: u rg = u r e − j( θ −θ ) = u rx + ju ry
(1.45)
g
g
Cao häc Tù ®éng hóa Khóa 2002
Nội
m
m
Đại học Bách khoa Hà
20
- Từ thông móc vòng rotor: rg = r e − j( θ −θ ) = ψ rx + j ry
g
(1.46)
m
Khai triển biểu thức điện áp stator và rotor:
u sg
u rg
j( θg −θm )
jθg
= R s i sg e
= R r i rg e
jθg
j( θg −θm )
+
+
(
d ψ sg e
(
jθg
s sg
dt
d ψ rg e
)= R i
j( θg −θm )
e
jθg
)= R i
r rg
dt
+e
e
jθg
d ψ sg
j( θg −θm )
dt
+e
jθ
+ je g ωg ψ sg
j( θg −θm )
dψ rg
dt
+ je
(1.47)
j ( θg − θ m )
(ωg − P.ωm )ψ rg
(1.48)
Rót gän, ta cã:
u sg = R s i sg +
u rg = R r i rg +
d ψ sg
+ jωg ψ sg
dt
d ψ rg
(1.49 a,b)
+ j(ωg − P.ωm )ψ sg
dt
Tõ th«ng mãc vßng:
ψ sg = L s i sg + L m i rg
(1.50 a,b)
ψ rg = L r i rg + L m i sg
BiĨu diƠn díi d¹ng ma trËn, ta cã:
u sx R s + pL s
u ω L
sy = g s
u rx pL m
u sy (ωg − P.ωm )L m
− ωg L s
R s + pL s
− (ωg − P.ωm )L m
pL m
− ωg L m
i sx
i
ωg L m
pL m
. sy
R r + pL r
− (ωg − P.ωm )L r i rx
(ωg − P.ωm )L r R r + pL r
i ry
pL m
(1.51)
1.3.4.2. Các biểu thức điện áp dạng véc tơ không gian trong hệ tọa độ gắn
vào stator
Trong trường hợp này thì g =0. Ta có:
R
R
u sD R s + pL s
u sQ = 0
u rD pL m
u sQ P.ωm ) m
i sD
i
R s + pL s 0
. sQ
P.ωm L m R r + pL r P.ωm L r i rD
− P.ωm L r R r + pL r i rQ
pL m
0
u s = R s is +
Cao häc Tự động hóa Khóa 2002
Nội
pL m
d s
dt
0
pL m
(1.52)
(1.53)
Đại học Bách khoa Hà
21
u 'r e − jθm = R r i 'r e − jθm +
d (ψ 'r e − jθm )
dt
(1.54 a,b)
d ψ 'r
u 'r = R r i 'r +
− jPωm ψ 'r
dt
ψ s = L s i s + L m i 'r
(1.55a,b)
ψ r = L r i 'r + L m i s
1.3.4.3. Các biểu thức điện áp dạng véc tơ không gian trong hệ tọa độ gắn
vào rotor
Trong trường hợp này thì g = Pm . Ta cã:
R
R
R
u sα R s + pL s
u
sβ = ωg L s
u rα pL
m
u sβ 0
R
− Pωm L m i sα
i
R s + pL s Pωm L m pL m
. sβ
i rα
R r + pL r 0
0
R r + pL r i rβ
pL m
0
− Pωm L s pL m
(1.56)
u s' = R s i s' +
dψ s'
+ jψ s' .Pωm
dt
(1.57)
u r = R r ir +
dψ r
dt
(1.58)
ψ s' = L s i s' + L m i r
(1.59)
ψ r = Lr ir + L i
'
m s
1.3.4.4. Các biểu thức điện áp dạng véc tơ không gian trong hệ tọa độ tốc độ
đồng bộ
Trong trường hợp này thì g = s .Ta cã:
R
R
u sX R s + pL s
u ω L
sY = s s
u rX pL m
u sY sωs L m
Cao häc Tù ®éng hãa – Khãa 2002
Néi
R
R
− ωg L m i sX
R s + pL s ωs L m
pL m
.i sY
− s.ωs L m R r + pL r − sωs L r i rX
sωs L
pL m
R r + pL r i rY
s L s
pL m
(1.60)
Đại học Bách khoa Hà
22
dψ s
+ jω s ψ s
dt
dψ r
u r = R r ir +
+ jsωs .ψ s
dt
u s = R s is +
(1.61 a,b)
Từ thông móc vòng:
s = Ls is + L m i r
(1.62 a,b)
ψ r = L r i r + L m is
1.4. C¸c biĨu thøc tÝnh mô men điện từ
Biểu thức mô men điện từ tổng quát:
t e = c s ì i 'r
(1.63)
Trong đó c lµ h»ng sè; ψ s vµ i 'r lµ vÐc tơ không gian từ thông stator và dòng điện
rotor cả hai được tính toán trên hệ tọa độ D - Q.
Biên độ mô men điện từ:
(1.64)
t e = c s . i r sin
Trong đó là góc giữa véc tơ từ thông móc vòng stator và dòng điện rotor.
Khi =900 thì mô men thu được là lớn nhất và giá trị mô men tính theo biểu thức
P
P
giống như biểu thức tính mô men của động cơ điện một chiều.
Đối với các động cơ điện một chiều thì các thành phần sinh mô men là véc
tơ từ thông kích thích và véc tơ dòng điện phần ứng được phân bố đều, vuông góc
với nhau, có biên độ có thể điều khiển độc lập. Do đó mô men điện từ sinh ra
luôn cực đại và có thể điều khiển được dễ dàng.
Đối với các động cơ không đồng bộ thì khó để thực hiện được nguyên lý
giống như động cơ một chiều, vì các đại lượng sinh mô men có quan hệ phụ
thuộc và chúng là cố định so với stator và rotor, chúng còn phụ thuộc vào biên
độ, tần số và góc pha của dòng điện stato. Ngoài ra đối với động cơ rotor lồng
sóc, ta không thể điều khiển được dòng điện rotor bằng các biện pháp đơn giản,
điều này chỉ phù hợp cho việc làm thí nghiệm hoặc cho các động cơ làm việc đặc
biệt.
Cao học Tự động hóa Khóa 2002
Nội
Đại học Bách khoa Hà