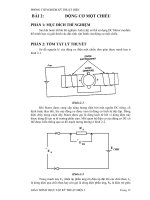
Chương 2: Đông cơ Servo
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (342.62 KB, 7 trang )
Chương 2:
Đông cơ Servo
1. Giới thiệu động cơ RC Servo:
- Động cơ RC (Radio Control) Servo đầu tiên được thiết kế
để sử dụng trong điều khiển máy bay hoặc xe hơi. Về sau, động cơ
này được sử dụng phổ biến như là các cơ cấu chấp hành được điều
khiển bằng vi xử lý, vừa nhỏ gọn, vừa tiết kiệm năng lượng lại rẻ
tiền.
-Động cơ RC Servo có moment xoắn cao so với kích thước
của nó, có thể cho vị trí góc chính xác bằng cách cung cấp xung
theo phương thức điều biến độ rộng xung (PWM); độ rộng của
xung sẽ quyết định vị trí góc của trục động cơ.
2. Cấu tạo bên trong:
Gồm 9 phần cơ bản:
Hình 4: Cấu tạo chính của RC
Servo
- Động cơ và vôn kế (hình 5) nối với mạch điều khiển tạo
thành mạch hồi tiếp vòng kín. Cả mạch điều khiển và động cơ đều
được cấp nguồn DC (thường từ 4.8
– 7.2 V). Để quay động cơ, tín
hiệu số được gới tới mạch điều khiển. Tín hiệu này khởi động động
cơ, thông qua chuỗi bánh răng, nối với vôn kế. Vị trí
của trục vôn
1. Động cơ chính
2. Board điều khiển tín hiệu hồi tiếp
3. Dây nguồn (Red)
4. Dây tín hiệu vào (Yellow or White)
5. Dây mass (Black)
6. Volt kế
7. Trục/Bánh răng Output
8. Horn/Wheel/Arm gắn kèm
9. Vỏ Servo
10.Chip điều khiển chính.
kế cho biết vị trí trục ra của servo. Khi vôn kế đạt được vị trí mong
muốn, mạch điều khiển sẽ tắt động cơ.
- Động cơ servo được thiết kế để quay có giới hạn chứ không
phải quay liên tục như động cơ DC hay động cơ bước. Mặc dù ta
có th
ể chỉnh động cơ servo R/C quay liên tục nhưng công dụng
chính của động cơ servo là đạt được góc quay chính xác trong
khoảng từ 90
o
– 180
o.
Việc điều khiển này có thể ứng dụng để lái
robot, di chuyển các tay máy lên xuống, quay một cảm biến để
quét khắp phòng…
3. Cách thức hoạt động và phương pháp điều khiển:
- Như đã nói ở trên vị trí góc của động cơ RC Servo điều
khiển dựa trên nguyên lý PWM.
-
Servo đáp ứng của một dãy các xung số ổn định. Cụ thể
hơn, mạch điều khiển là đáp ứng của một tín hiệu số có các xung
biến đổi từ 1 – 2 ms. Các xung này được gởi đi 50 lần/giây – tức là
ta s
ẽ cấp xung mỗi 20ms một lần. Servo đòi hỏi khoảng 30 – 60
xung/giây. N
ếu số này qua thấp, độ chính xác và công suất để duy
trì servo sẽ giảm.
- Chú ý rằng không phải số xung trong một giây điều khiển
servo mà là chiều dài (độ rộng) của các xung, độ rộng của xung
cấp sẽ quyết định vị trí góc của trục động cơ.
+ Với xung có độ rộng 1.5ms thì trục động cơ sẽ quay đến
vị trí góc 90
o
(thường được gọi là Neutral). (hình 6)
+ Với độ rộng xung nhỏ hơn 1.5ms thì trục động cơ sẽ
quay gần về vị trí góc 0
o
và ngược lại nếu lơn hơn 1.5ms thì trục
động cơ sẽ quay gần đến vị trí góc 180
o
Hình 5: Giản đồ xung kích Servo.
- Các servo khác nhau ở góc quay được với cùng tín hiệu 1 –
2 ms (ho
ặc bất kỳ) được cung cấp. Các servo chuẩn được thiết kế
để quay tới v
à lui từ 90
0
– 180
0
khi được cung cấp toàn bộ chiều dài
xung. Ph
ần lớn servo có thể quay được 180
0
hay gần 180
0
.
- N
ếu ta cố điều khiển servo vượt quá những giới hạn cơ học
của nó , trục ra của động cơ sẽ đụng vật cản bên trong, dẫn đến các
bánh răng bị m
ài mòn hay bị rơ. Hiện tượng này kéo dài hơn vài
giây sẽ làm bánh răng của động cơ bị phá hủy.
* Điều khiển:
Với nguyên tắc điều khiển như vậy thì ta có một phương án
cấp xung cho động cơ như sau: góc quay của một động cơ là 180
0
,
để quay hết 180
0
đó, ta cần cấp xung có độ rộng từ 1,25ms cho đến
1,75ms, tức là khoảng 500μs. Càng chia nhỏ khoảng này thì vị trí
góc của động cơ đạt được càng nhiều. Ví dụ: nếu ta có thể cấp
xung với độ rộng chia nhỏ khoảng 2μs thì trong khoảng 500μs ta
thu được 255 vị trí góc của động cơ, điều n
ày có nghĩa là mỗi vị trí
góc của động cơ là 0,7
0
, còn nếu ta có thể cấp xung với độ rộng
chia nhỏ khoảng 1μs thì trong khoảng 500μs đó, ta có thể thu được
500 vị trí góc của động cơ, tức là mỗi vị trí góc là 0,35
0
. Điều này
có ý ngh
ĩa rất lớn đến độ chính xác khi điều khiển hệ PAN-TILT.
Trong đề tài này, độ chia đạt được đến 0,32
0
, tức 560 vị trí góc
của động cơ.
4. Chọn động cơ Servo:
- Servo được chọn trong đề tài này là model S3003 của hãng
Futaba.
Hình 6: Model s3003 của hãng Futaba
- Các thông số kỹ thuật:
+ Kích thước chuẩn: length x width x height =
1.6 x 0.8
x 1.4 inch.
+ T
ốc độ: 0.23sec/60
0
(ở 4.8V).
0.19sec/60
0
(ở 6.0V).
+ Momen xoắn: 3.2kg-cm (ở 4.8V).
4.1kg-cm (ở 6.0V).
+ Trọng lượng: 37.2g
III. Hệ Pan-Tilt:
1. Gi
ới thiệu Kỹ thuật Panning – Tilting:
- Tilting là 1 kỹ thuật quay phim. Trong kỹ thuật này, hệ
thống camera đứng yên tại 1 vị trí theo 1 trục ngang và camera sẽ
quay theo 1 mặt phẳng thẳng đứng - vertical plane (hay” tilting
plane”
). Camera di chuyển lên xuống trong 1 mặt phẳng thẳng
đứng, sự di chuyển n
ày cũng tương tự như 1 người nào đó đang
gật đầu “đồng ý”.
Hình 7: Tilting Technique
- Cũng tương tự như Tilting, Panning cũng là 1 kỹ thuật quay
phim. Chỉ khác ở chỗ hệ thống camera đứng yên tại 1 vị trí theo 1
trục dọc và camera sẽ quay theo 1 mặt phẳng nằm ngang -
horizontal plane
(hay” panning plane”). Camera di chuyển qua lại
trái phải trong 1 mặt phẳng nằm ngang, sự di chuyển này cũng
tương tự như 1 người nào đó đang lắc đầu “không đồng ý”.
Hình 8: Panning Technique
-
Hai kỹ thuật này thường được kết hợp với nhau, tạo nên 1
h
ệ thống Pan-Tilt xoay được lên - xuống, qua - lại và hơn thế là
chúng có th
ể xoay được đến mọi vị trí trong không gian xung
quanh. Do v
ậy, Pan-Tilt ứng dụng rộng rãi trong nhiều lĩnh vực:
làm phim ảnh, camera giám sát (quân sự), hệ thống máy siêu âm
(y t
ế)…
2. Cấu tạo cơ bản 1 hệ Pan-Tilt: