Tài liệu Điều khiển tối ưu P2 doc
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (1008.42 KB, 242 trang )
Chѭѫng 2: ĈIӄU KHIӆN THÍCH NGHI
2.1 Khái niӋm
2.1.1 Ĉӏnh nghƭa
“Thích nghi là quá trình thay ÿәi thông sӕ và cҩu
trúc hay tác ÿӝng ÿiӅu khiӇntrêncѫ sӣ lѭӧng thông
tin có ÿѭӧc trong quá trình làm viӋcvӟimөc ÿích
ÿҥt ÿѭӧcmӝttrҥng thái nhҩt ÿӏnh, thѭӡng là tӕi ѭu
khi thiӃulѭӧng thông tin ban ÿҫucNJng nhѭ khi ÿiӅu
kiӋn làm viӋc thay ÿәi” hay :
ĈLӅXNKLӇQWKtFKQJKL 3*6761JX\ӉQ7Kӏ3KѭѫQJ+j
Trang 1
“ĈiӅu khiӇn thích nghi là tәng hӧpcáckƭ thuұt
nhҵmtӵÿӝng chӍnh ÿӏnh các bӝÿiӅuchӍnh trong
mҥch ÿiӅu khiӇnnhҵmthӵchiӋn hay duy trì ӣ mӝt
mӭc ÿӝ nhҩt ÿӏnh chҩtlѭӧng cӫahӋ khi thông sӕ
cӫa quá trình ÿѭӧc ÿiӅu khiӇn không biӃttrѭӟc hay
thay ÿәi theo thӡi gian”.
H͏ th͙ng ÿ˱ͫcmôt̫ trong hình d˱ͣi ÿây g͛
m2
vòng:
-Vòng h͛iti͇pthôngth˱ͥng
-Vòng h͛iti͇p ÿi͉ukhi͋n thích nghi
ĈLӅXNKLӇQWKtFKQJKL 3*6761JX\ӉQ7Kӏ3KѭѫQJ+j
Trang 2
KӃtluұn
1. ĈiӅu khiӇn thích nghi
liên quan ÿӃn:
-Sӵ khác nhau vӅ các quá
trình ÿӝng hӑc
-Sӵ khác nhau vӅ các
nhiӉu
2.Các hӋ thӕng thích nghi
là phi tuyӃn
ĈLӅXNKLӇQWKtFKQJKL 3*6761JX\ӉQ7Kӏ3KѭѫQJ+j
Trang 3
2.1.2 Nhұndҥng hӋ thӕng
x Làm thӃ nào ÿӇ có ÿѭӧc mô hình?
-Vұtlí(hӝptrҳng)
- Kinh nghiӋm(hӝp ÿen)
-KӃthӧp( hӝp xám)
x KӃ hoҥch hoá thӵc nghiӋm
x Chӑnlӵacҩutrúcmôhình
- Các hàm chuyӇn ÿәi
- Ĉáp ӭng xung
- Các mô hình trҥng thái
ĈLӅXNKLӇQWKtFKQJKL 3*6761JX\ӉQ7Kӏ3KѭѫQJ+j
Trang 4
x Tham sӕ thích nghi
-Thӕng kê
-Cácvҩn ÿӅ nghӏch ÿҧo
x Sӵ hӧplí
2.1.3 Ѭӟclѭӧng tham sӕ thích nghi t/gian thӵc
1. GiӟithiӋu
2. Bình phѭѫng cӵctiӇuvàhӗi qui
3. HӋ thӕng ÿӝng
4. Các ÿiӅukiӋnthӵc nghiӋm
5. Các ví dө
6. Các kӃtluұn
ĈLӅXNKLӇQWKtFKQJKL 3*6761JX\ӉQ7Kӏ3KѭѫQJ+j
Trang 5
2.1.4 Phân loҥi
Có thӇ phân loҥicáchӋ thích nghi theo các tiêu
chuҭnsau:
1. HӋ thích nghi mô hình tham chiӃu (MRAS)
2. Bӝ tӵ chӍnh ÿӏnh ( STR )
3. Lӏch trình ÿӝ lӧi
4. HӋ tӵ hӑc
5. HӋ tӵ tә chӭc
ĈLӅXNKLӇQWKtFKQJKL 3*6761JX\ӉQ7Kӏ3KѭѫQJ+j
Trang 6
2.1.5 Ӭng dөng
x Tӵ chӍnh ÿӏnh
x Lӏch trình ÿӝ lӧi
x Thích nghi liên tөc
Quá trình ÿӝng hӑc
BiӃn ÿәi
Hҵng sӕ
Sӱ dөng bӝÿiӅu khiӇnvӟi các thông sӕ
biӃn ÿәi
Sӱ dөng bӝÿiӅu khiӇnvӟi các thông sӕ
biӃn ÿәi
Sӱ dөng bӝ biӃn ÿәivӟi các thông sӕ
hҵng
Sӱ dөng bӝ biӃn ÿәivӟi các thông sӕ
hҵng
Sӵ biӃn thiên
không biӃttrѭӟc
Sӵ biӃn thiên
biӃttrѭӟc
Sӱ dөng bӝÿiӅu khiӇnthích
nghi
Sӱ dөng bӝÿiӅu khiӇnthích
nghi
Sӱ dөng lӏch trình ÿӝ lӧi
Sӱ dөng lӏch trình ÿӝ lӧi
ĈLӅXNKLӇQWKtFKQJKL 3*6761JX\ӉQ7Kӏ3KѭѫQJ+j
Trang 7
2.2 HӋ thích nghi mô hình tham chiӃu - MRAS
(M
odel Reference Adaptive Systems)
u
y
u
c
Mô hình
Mô hình
Cѫ cҩuhiӋuchӍnh
Cѫ cҩuhiӋuchӍnh
Bӝ ÿiӅukhiӇn
Bӝ ÿiӅukhiӇn
Ĉӕitѭӧng
Ĉӕitѭӧng
Tham sӕ ÿiӅukhiӇn
y
m
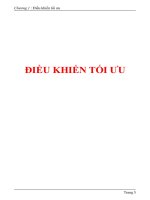
Hình 2.2 S˯ÿ͛kh͙icͯam͡th͏ th͙ng thích nghi
mô hình tham chi͇u
ĈLӅXNKLӇQWKtFKQJKL 3*6761JX\ӉQ7Kӏ3KѭѫQJ+j
Trang 8
2.2.1 Sѫÿӗchӭcnăng
HӋ thӕng thích nghi sӱ dөng mô hình chuҭnlàmӝt trong
nhӳng phѭѫng pháp chính cӫa ÿiӅukhiӇn thích nghi.
Nguyên lí cѫ bҧn ÿѭӧctrìnhbàyӣ hình 2.2
Mô hình chuҭnsӁ cho ÿáp ӭng ngõ ra mong muӕn ÿӕivӟi
tín hiӋu ÿһt(yêucҫu). HӋ thӕng có mӝt vòng hӗitiӃp
thông thѭӡng bao gӗm ÿӕitѭӧng và bӝÿiӅukhiӇn. Sai sӕ
e là sai lӋch giӳa ngõ ra cӫahӋ thӕng và c
ӫamôhình
chuҭne = y -y
m
. BӝÿiӅukhiӇn có thông sӕ thay ÿәidӵa
vào sai sӕ này. HӋ thӕng có hai vòng hӗitiӃp:hӗitiӃp
trong là vòng hӗitiӃp thông thѭӡng và vòng hӗitiӃp bên
ngoài hiӋuchӍnh tham sӕ cho vòng hӗitiӃp bên trong.
Vòng hӗitiӃp bên trong ÿѭӧcgiҧ sӱ là nhanh hѫnvòng
hӗitiӃp bên ngoài.
ĈLӅXNKLӇQWKtFKQJKL 3*6761JX\ӉQ7Kӏ3KѭѫQJ+j
Trang 9
Hình 2.2 là mô hình MRAS ÿҫu tiên ÿѭӧc ÿӅ nghӏ bӣi
Whitaker vào năm 1958 vӟi hai ý tѭӣng mӟi ÿѭӧc ÿѭara:
TrѭӟchӃtsӵ thӵchiӋncӫahӋ thӕng ÿѭӧcxácÿӏnh bӣi
mӝt mô hình, thӭ hai là sai sӕ cӫabӝÿiӅu khiӇn ÿѭӧc
chӍnh bӣisaisӕ giӳamôhìnhchuҭnvàhӋ thӕng. Mô hình
chuҭnsӱ dөng trong hӋ thích nghi bҳt nguӗntӯ hӋ liên tөc
sau ÿó
ÿѭӧcmӣ rӝng sang hӋ rӡirҥccónhiӉungүu nhiên.
Chѭѫng này tұp trung vào ý tѭӣng cѫ bҧn. ĈӇ vҩn ÿӅ
ÿѭӧctrìnhbàymӝt cách rõ ràng, ta chӍ tұp trung vào cҩu
hình trong hình 2.2 ÿѭӧcgӑilàhӋ MRAS song song . Ĉây
là mӝt trong nhiӅu cách có thӇ xây dӵng mô hình chuҭn.
Chѭѫng này ÿӅ cұpchínhÿӃnhӋ liên tөctheophѭѫng
pháp trӵctiӃp có nghƭa là tham sӕÿѭӧccұpnhұtmӝtcách
trӵctiӃp.
ĈLӅXNKLӇQWKtFKQJKL 3*6761JX\ӉQ7Kӏ3KѭѫQJ+j
Trang 10
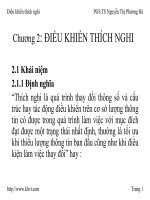
2.2.2 LuұtMIT (Massachusetts Institude Technology)
Hình 2.3 Mô hình sai s͙
ĈLӅXNKLӇQWKtFKQJKL 3*6761JX\ӉQ7Kӏ3KѭѫQJ+j
Trang 11
HӋ thӕng thích nghi mô hình tham chiӃu ÿҫu tiên
ÿѭӧc ÿѭaraÿӇ giҧi quyӃtvҩn ÿӅ: các ÿһc ÿiӇmcӫa
mӝt mô hình tham chiӃu yêu cҫu ngõ ra là quá trình
lí tѭӣng cҫncóÿáp ӭng ÿӕivӟitínhiӋu ÿiӅu khiӇn
nhѭ thӃ nào. Ĉӗ thӏ minh hӑa trong hình 2.2. Trong
trѭӡng hӧp này, mô hình tham chiӃu mang tính song
song hѫnlànӕitiӃp, giӕng nhѭ cho SOAS (S
elf
O
scillating Adaptive Systems). BӝÿiӅu khiӇncóthӇ
ÿѭӧcxemnhѭ bao gӗm hai vòng: mӝt vòng phía
trong gӑi là vòng hӗitiӃp thông thѭӡng có quá trình
và bӝÿiӅukhiӇn. Các thông sӕ cӫabӝÿiӅukhiӇn
ÿѭӧcchӍnh ÿӏnh bӣi vòng ngoài sao cho sai sӕ e giӳa
ngõ ra y và ngõ ra mô hình y
m
là nhӓ nhҩt.
ĈLӅXNKLӇQWKtFKQJKL 3*6761JX\ӉQ7Kӏ3KѭѫQJ+j
Trang 12
Vì vұy vòng ngoài còn ÿѭӧcgӑi là vòng chӍnh ÿӏnh.
Vҩn ÿӅ là xác ÿӏnh cѫ cҩuchӍnh ÿӏnh cho hӋ thӕng
әn ÿӏnh, nghƭalàsaisӕ bҵng zero. ĈiӅu này không
thӇ thӵchiӋn ÿѭӧc. Cѫ cҩuchӍnh ÿӏnh vӟi thông sӕ
sau ÿѭӧcgӑilàluұt MIT, ÿѭӧcsӱ dөng cho hӋ
MRAS ÿҫu tiên:
T
J
T
w
w
e
e
dt
d
ĈLӅXNKLӇQWKtFKQJKL 3*6761JX\ӉQ7Kӏ3KѭѫQJ+j
Trang 13
Trong phѭѫng trình này e là sai sӕ cӫamôhình
e = y – y
m
. Các thành phҫncӫa vector we/wT là ÿҥo
hàm ÿӝ nhҥycӫasaisӕÿӕivӟi các thông sӕ chӍnh
ÿӏnh T.Thông sӕ J xác ÿӏnh tӕc ÿӝ thích nghi. Luұt
MIT có thӇÿѭӧcgiҧi thích nhѭ sau. Giҧ sӱ rҵng các
thông sӕ T thay ÿәichұmhѫnnhiӅuso vӟicácbiӃn
khác cӫahӋ thӕng. ĈӇ bình phѭѫng sai sӕ là bé nhҩt,
cҫn thay ÿәi các thông sӕ theo hѭӟng gradient âm
cӫabìnhphѭѫng sai sӕ e
2
.
Giҧ sӱ muӕn thay ÿәi thông sӕ cӫabӝÿiӅu khiӇnsao
cho sai sӕ giӳangõracӫa ÿӕitѭӧng và cӫamôhình
chuҭntiӃntӟi zero.
ĈLӅXNKLӇQWKtFKQJKL 3*6761JX\ӉQ7Kӏ3KѭѫQJ+j
Trang 14
Ĉһt e là sai sӕ và T là thông sӕ hiӋuchӍnh. ChӍ tiêu
chҩtlѭӧng :
ÿӇ làm cho J(T) MIN thì cҫnphҧithayÿәi các thông
sӕ theo hѭӟng âm cӫa gradient J, có nghƭalà:
)1.2(
2
1
)(
2
eJ
T
)2.2(
T
J
T
J
T
w
w
w
w
w
w e
e
J
t
ĈLӅXNKLӇQWKtFKQJKL 3*6761JX\ӉQ7Kӏ3KѭѫQJ+j
Trang 15
Giҧ sӱ rҵng các thông sӕ cҫn thay ÿәi T thay ÿәi
chұmhѫnnhiӅuso vӟicácbiӃn khác cӫahӋ thӕng.
Vì vұy ÿҥohàm ÿѭӧc tính vӟigiҧ thiӃt T là hҵng
sӕ. BiӇuthӭc ÿҥo hàm gӑilàhàmÿӝ nhҥycӫahӋ
thӕng. Luұt ÿiӅuchӍnh theo phѭѫng trình (2.2) vӟi
là ÿӝ nhҥythìcóliênhӋ giӕng nhѭ luұt MIT.
Cách chӑnhàmtә
nthҩt theo phѭѫng trình (2.1) có
thӇ là tuǤ ý. NӃuchӑn
J(
T
) = ~e~ (2.3)
Khi ÿóluұthiӋuchӍnh sӁ là :
T
w
we
T
w
we
T
w
w e
)4.2()(esign
e
dt
d
T
J
T
w
w
ĈLӅXNKLӇQWKtFKQJKL 3*6761JX\ӉQ7Kӏ3KѭѫQJ+j
Trang 16
Hoһc
)(esign
e
sign
dt
d
¸
¹
·
¨
©
§
w
w
T
J
T
Ĉây gӑilàgiҧithuұtdҩu-dҩu. HӋ rӡirҥcsӱ dөng
giҧithuұt này ÿѭӧc ӭng dөng trong viӉnthôngnѫi
ÿòi hӓi tính toán nhanh và thӵchiӋn ÿѫngiҧn.
Phѭѫng trình (2.2) còn ÿѭӧcápdөng trong trѭӡng
hӧp có nhiӅu thông sӕ hiӋuchӍnh, khi ÿó T trӣ
thành mӝt vector và e/
T
là gradient cӫa sai sӕÿӕi
vӟi các thông sӕ tѭѫng ӭng. Ӭng dөng cӫaluұt
MIT ÿѭӧcbiӇudiӉnbҵng hai ví dө sau :
ĈLӅXNKLӇQWKtFKQJKL 3*6761JX\ӉQ7Kӏ3KѭѫQJ+j
Trang 17
Ví dө 2.1 - HiӋuchӍnh ÿӝ lӧinuôitiӃn
Xét vҩn ÿӅ hiӋuchӍnh ÿӝ lӧi nuôi tiӃnvӟimôhình
và ÿӕitѭӧng ÿӅucóhàmtruyӅn là G(S). Sai sӕ là:
e = y – y
m
= G(p)
T
u
c
– G(p)
Tq
u
c
vӟiuclàtínhiӋu ÿһt, y
m
là ngõ ra mô hình, y là ngõ
ra ÿӕitѭӧng, T là thông sӕ hiӋuchӍnh, và p = d/dt là
toán tӱ vi phân. Ĉӝ nhҥykhiҩybҵng :
0
/)(
T
T
mc
yupG
e
w
w
Luұt MIT ÿѭӧccho:
0
/
T
T
eyy
dt
d
m
c
ĈLӅXNKLӇQWKtFKQJKL 3*6761JX\ӉQ7Kӏ3KѭѫQJ+j
Trang 18
NӃudҩucӫa Tq ÿѭӧcbiӃt, khi ҩy ÿѭara
J
=
J
’/
Tq
Sӵ thay ÿәicӫa tham sӕ T tӍ lӋ vӟi tích sai sӕ e và
ngõ ra cӫamôhìnhy
m
.
Ví dө trên không dùng viӋcxҩpxӍ : Khi luұtMIT
ÿѭӧcápdөng vào nhӳng vҩn ÿӅ phӭctҥphѫnthìcҫn
phҧicóxҩpxӍÿӇtính ÿѭӧc ÿӝ nhҥy.
Ví dө 2.2 MRAS cho hӋ bұcnhҩt
Xét hӋ thӕng ÿѭӧcmôtҧ bӣiphѭѫng trình:
)5.2(buay
dt
dy
ĈLӅXNKLӇQWKtFKQJKL 3*6761JX\ӉQ7Kӏ3KѭѫQJ+j
Trang 19
vӟiu làbiӃn ÿiӅu khiӇn, y là ngõ ra ÿѭӧc ÿolѭӡng.
Giҧ sӱ mong muӕncóÿѭӧchӋ vòng kín ÿѭӧcmôtҧ
bӣi:
Mô hình kèm theo hoàn hҧocóthӇÿҥt ÿѭӧcvӟibӝ
ÿiӅu khiӇn:
u(t) = u
c
(t) –s
0
y(t) (2.6)
vӟi tham sӕ t
0
= b
m
/ b ; s
0
= (a
m
–a)/b
cmmm
m
ubya
dt
dy
ĈLӅXNKLӇQWKtFKQJKL 3*6761JX\ӉQ7Kӏ3KѭѫQJ+j
Trang 20
Chú ý hӗitiӃpsӁ là dѭѫng nӃua
m
< a, nghƭalàmô
hình mong muӕn thì chұmhѫn quá trình. ĈӇ áp dөng
luұt MIT , sӱ dөng sai sӕ e = y – y
m
, vӟi y là ngõ ra
hӋ kín.
Theo phѭѫng trình (2.5) và (2.6) thì:
c
u
bsap
bt
y
0
0
vӟi p là toán tӱ vi phân. Ĉӝ nhҥycóthӇ tính ÿѭӧc
bҵng cách lҩy ÿҥo hàm riêng phҫntheothamsӕ cӫa
bӝÿiӅu khiӇns
0
và t
0
:
ĈLӅXNKLӇQWKtFKQJKL 3*6761JX\ӉQ7Kӏ3KѭѫQJ+j
Trang 21
Các công thӭc này không thӇ dùng vì thông sӕÿӕi
tѭӧng a và b chѭabiӃt. Vì vұycҫnphҧilàmxҩpxӍ
ÿӇ có ÿѭӧcluұthiӋuchӍnh tham sӕ thӵctӃ. ĈӇ thӵc
hiӋn ÿiӅunày, ÿҫu tiên cҫn quan sát vӟigiátrӏ tӕi ѭu
cӫa tham sӕ bӝÿiӅu khiӇn, ta có :
p + a + bs
0
= p + a
m
c
u
bsap
b
t
e
00
w
w
y
bsap
b
u
bsap
tb
s
e
c
0
2
0
0
2
0
)(
w
w
ĈLӅXNKLӇQWKtFKQJKL 3*6761JX\ӉQ7Kӏ3KѭѫQJ+j
Trang 22
Hѫnnӳacҫn chú ý là b có thӇÿѭӧc bao gӗm trong hӋ sӕ
tӕc ÿӝ thích nghi J. BӣivìnóxuҩthiӋn trong tích Jb,
ÿiӅu này ÿòi hӓidҩucӫab phҧi ÿѭӧcbiӃt. Sau khi xҩp
xӍ, luұtcұpnhұt các tham sӕÿiӅu khiӇncóÿѭӧc là:
ey
apdt
ds
eu
apdt
dt
m
c
m
¸
¸
¹
·
¨
¨
©
§
¸
¸
¹
·
¨
¨
©
§
1
1
0
0
J
J
Ví dө trên chӍ cách sӱ dөng luұtMIT ÿӇ tҥo ÿѭӧc
luұthiӋuchӍnh thông sӕ.
(2.7)
ĈLӅXNKLӇQWKtFKQJKL 3*6761JX\ӉQ7Kӏ3KѭѫQJ+j
Trang 23
Bài tұpvӅ nhà (dùng làm bài tұp trong phҫn Câu
hӓiôntұpvàbàitұp ӣ cuӕichѭѫng): Mô phӓng
bҵng Matlab hӋ MRAS trong ví dө 2.2 (Ví dө 4.2
TLTK[1]) vӟi a = 1, b = 0.5, a
m
= 2 và b
m
= 2. Tín
hiӋu vào là sóng vuông vӟibiênÿӝ bҵng 1 và J = 2.
ĈLӅXNKLӇQWKtFKQJKL 3*6761JX\ӉQ7Kӏ3KѭѫQJ+j
Trang 24
Vài tính ch̭tsauc̯nchúý:
1. Không cҫnthiӃt ÿòi hӓimӝtmôhìnhkèmtheo
hoàn hҧo. Các thӫ tөccóthӇ ÿѭӧcápdөng cho hӋ
phi tuyӃn. Phѭѫng pháp này cNJng có thӇÿѭӧc dùng
ÿӇ ÿiӅu khiӇn cho hӋ biӃttrѭӟcmӝtphҫn.
2. Cҩutrúcnhѭ hình 2.3 có mӝtphépnhângiӳa e và
e/
T
Lҩy tích phân phѭѫng trình (2.7) sӁ cho ra các tham
sӕ và ÿѭӧctruyӅn ÿӃnbӝÿiӅu khiӇnsӱ dөng phép
nhân thӭ hai.
3. Sӵ xҩpxӍ là cҫnthiӃt ÿӇ có ÿѭӧcluұt ÿiӅu khiӇn
hiӋuchӍnh tham sӕ thӵctӃ.
ĈLӅXNKLӇQWKtFKQJKL 3*6761JX\ӉQ7Kӏ3KѭѫQJ+j
Trang 25