Tài liệu Đặc tính thời gian của hệ thống điều khiển số ppt
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (301.03 KB, 24 trang )
C.4:
C.4:
C TÍNH THI
C TÍNH THI
GIAN
GIAN
CA H THNG IU KHIN S
CA H THNG IU KHIN S
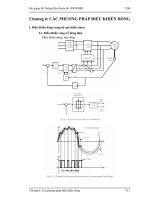
4.1 KHÁI NIM CHUNG
G(z)
X(z)
x(kT)
Y(z)
y(kT)
Cho x(kT) và G(z). Xác đnh y(kT)
{}
() () ()xkT X z xkT⇒=Z
()
() () (). ()
()
Yz
Gz Yz X zGz
Xz
=⇒=
{ }
1
() ()ykT Y z
−
⇒=Z
Ví d
()1()xkT kT=
1
()
aT
aT
e
Gz
ze
−
−
−
=
−
• Cho:
{}
()1() () 1()
1
z
xkT kT X z kT
z
=⇒= =
−
Z
1
() (). ()
1
aT
aT
z e
Yz XzGz
z ze
−
−
−
==⋅
−−
•Tra bng:
{}
11
1
() ()
1
aT
aT
ze
ykT Y z
zze
−
−−
−
⎧⎫
−
==⋅
⎨⎬
−−
⎩⎭
ZZ
()1
akT
ykT e
−
=−
0 0.1 0.2 0.3 0.4 0.5
0
0.2
0.4
0.6
0.8
1
x(kT)
y(kT)
time [s]
4.2. XÁC NH C TÍNH THI GIAN CA
MT KHÂU BNG PHNG PHÁP QUY
2
() 2 1
()
() 2 1
Yz z
Gz
X zzz
−
==
− −
Cho hàm truyn đt ca khâu:
và tín hiu đu vào x(kT) vi k=0, 1, 2, …, ∞. Xây dng biu thc xác đnh y(kT)
1. Nhân chéo:
2
2 () () () 2 () ()zYz zYz Yz zXz Xz−−= −
2. Nhân hai v cho z
-n
vi n là bc cao nht ca z:
12 1 2
2 () () () 2 () ()Yz zYz z Yz z Xz z Xz
−− − −
−−= −
3. Ly Z
-1
c hai v. Áp dng tính cht Z ca hàm tr:
{ }
() () ()f kT f kT F z⇒=Z
{ }
1
() ( )F z f kT
−
⇒=Z
[ ]
{ }
1
(1) ()
f kT zFz
−
⇒−=Z
{ }
[ ]
11
() ( 1)
z Fz f kT
−−
⇒=−Z
3. Ly Z
-1
c hai v. Áp dng tính cht Z ca hàm tr:
{}{ }
112112
2() () () 2 () ()Yz zYz z Yz z Xz z Xz
−−−−−−
−− = −ZZ
2 ( ) [( 1) ] [( 2) ] 2 [( 1) ] [( 2) ]ykTykTyk T xkTxk T−−−−= −−−
4. Xác đnh y(kT). n gin cách vit:
( ) 0.5 [( 1) ] 0.5 [( 2) ] [( 1) ] 0.5 [( 2) ]ykT y k T y k T x k T x k T=−+−+−−−
( ) 0.5 ( 1) 0.5 ( 2) ( 1) 0.5 ( 2); 0,1,2,...,yk yk yk xk xk k=−+−+−−−= ∞
Biu thc đ quy đc tính thi gian đu ra ca khâu đã cho
(0) 0.5(1) 0.5(2) 2(1) 0.5(2)yy yx x=−+−+−−−
5. Xác đnh các giá tr ban đu:
y(-1) = 0; y(-2) = 0; x(-1) = 0; x(-2) = 0
Các bc tính
( ) 0.5 ( 1) 0.5 ( 2) ( 1) 0.5 ( 2); 0,1, 2,...,yk yk yk xk xk k=−+−+−−−= ∞
k = 0 … y(0) = 0.5y(-1) + 0.5y(-2) + x(-1) – 0.5x(-2) = 0
k = 1 … y(1) = 0.5y(0) + 0.5y(-1) + x(0) – 0.5x(-1) = x(0)
k = 2 … y(2) = 0.5y(1) + 0.5y(0) + x(1) – 0.5x(0) = 0.5x(0) + x(1) – 0.5x(0)
= x(1)
k = 3 … y(3) = 0.5y(2) + 0.5y(1) + x(2) – 0.5x(1) = 0.5x(1) + 0.5x(0) + x(2) – 0.5x(1)
= x(2) + 0.5 x(0)
. . . .
Lu đ thut toán
Nhp x(k),
K
max
y(-2) = 0; y(-1) = 0
x(-2) = 0; x(-1) = 0
k=0
y(k) = 0.5y(k-1) + 0.5y(k-2) + x(k-1) – 0.5x(k-2)
START
1
k = k + 1
k > K
max
STOP
1
(-)
y(1) = 0; y(2) = 0
x(1) = 0; x(2) = 0
k > K
max
+ 3
(+)
k = 3