Tài liệu một số câu hỏi về nguyên lý máy doc
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (997.25 KB, 18 trang )
1
Câu1: Nêu và định nghĩa bậc tự do t-ơng đối giữa 2 khâu,khái niệm về nối động
và ràng buộc?
Trả lời:
+) Nêu và định nghĩa bậc tự do t-ơng đối giữa hai khâu:
Xét chuyển động của vật B so với vật A trong không gian thì giữa chúng sẽ có 6
khả năng chuyển động là:Tx,Qx,Ty,Qy,Tz,Qz gọi là 6 bậc tự do t-ơng đối.
Còn nếu 2 vật Avà B cùng để trong mặt phẳng thì chúng có 3 khả năng chuyển
động so với nhau là Tx,Ty,Qz và gọi là 3 bậc tự do t-ơng đối.
Vậy bậc tự do t-ơng đối giữa 2 khâu là số khả năng chuyển động t-ơng đối giữa
hai khâu với nhau.
+) Nối động là việc hạn chế bớt số bậc tự do t-ơng đối giữa các khâu bằng cách bắt
chúng phải tiếp xúc với nhau theo một quy cách nhất định.
Ràng buộc hay số rạng buộc là số bậc tự do giữa các khâu bị hạn chế khi ta nối
chúng bằng các khớp động.
Câu 2: Thế nào là bậc tự do của cơ cấu phẳng? Lập công thức tính bậc tự do
của cơ cấu phẳng(tr-ờng hợp đơn giản) ?
Trả lời:
+) Bậc tự do của cơ cấu phẳng là số thông số cần thiết để xác định vị trí cơ cấu .
+) Lập công thức tính bậc tự do cơ cấu phẳng:Ta thấy rằng số bậc tự do cơ cấu phụ
thuộc vào số khâu và số khớp.Do vậy nếu gọi số bậc tự do cơ cấu là W và số bậc tự
do t-ơng đối tổng cộng của các khâu để rời đối với giá là Wo
Gọi R là tổng số ràng buộc các khớp động thì: W = Wo - R (1)
Gỉa sử cơ cấu có n khâu động: Wo = 3n.
Nếu gọi số khớp loại 5 có trong cơ cấu là P5 thì số dàng buộc do khớp loại 5 gây ra
là 2P5.
2
Nếu gọi số khớp loại 4 có trong cơ cấu là P4 thì số dàng buộc do khớp loại 4 gây
ra là P4. Vậy: R = 2p
5
+ p
4
thay Wo và R vào (1) ta có: W = 3n + ( 2p
5
+ p
4
) (2)
Gọi p
5
là khớp thấp t và p
4
là khớp cao c: W =3n - ( 2t +c ) (2)
(2) đ-ợc goi là công thức tính bậc tự do của cơ cấu
Câu 3: Em hiểu thế nào là ràng buộc thừa,bậc tự do thừa? Trong tr-ờng hợp cơ
cấu có ràng buộc thừa và bậc tự do thừa thì công thức tính bậc tự do thay đổi
nh- thế nào?
Trả lời:
+)Ràng buộc thừa là ràng buộc ng-ời ta đ-a vào cơ cấu để làm tăng độ đứng vững
mà không ảnh h-ởng tơí chuyển động cơ cấu.
+) Bậc tự do thừa là bậc tự do trong cơ cấu nh-ng nó không có ý nghĩa đối với vị
trí các khâu động trong cơ cấu hay nó không có ý nghĩa đối với cấu hình cơ cấu.
+) Cơ cấu có ràng buộc thừa: nếu gọi số ràng buộc thừa trong cơ cấu là Rt thì công
thức tổng quát để tính bậc tự do của cơ cấu là:
W = 3n - ( 2p
5
+ p
4
) + Rt
(ta thêm vào Rt để đảm bảo đúng số bậc tự do cơ cấu)
+) Cơ cấu có bậc tự do thừa: nếu gọi số bậc t- do thừa trong cơ cấu là S thì công
thức để tổng quát để tính bậc tự do cơ cấu là:
W = 3n - ( 2p
5
+ p
4
) + Rt S
Câu 4: Trình bày nguyên tắc xếp loại cơ cấu phẳng ( Xếp loại nhóm, cơ cấu):
* Mục đích: Xếp hạng cơ cấu là để có thể nghiên cứu có hệ thống các vấn đề về
động học và động lực học. Có thể tuỳ theo đặc điểm cấu tạo mà có thể xếp cơ cấu
thành những hạng khác nhau: những cơ cấu trong cùng một hạng có cùng những
đặc điểm cấu tạo. Vì các tính chất động học và động lực học phụ thuốc vào điều
kiện cấu tạo, do đó với tất cả các cơ cấu trong mỗi hạng có thể định một ph-ơng
pháp nghiên cứu thống nhất về động học và động lực học.
* Nguyên tắc xếp loại cơ cấu phẳng:
Việc xếp loại cơ cấu phẳng hoàn toàn dựa trên việc xếp loại nhóm:
- Nếu cơ cấu chỉ có một nhóm tĩnh định, loại của cơ cấu là loại nhóm.
- Nếu cơ cấu có nhiều nhóm tĩnh định thì loại của cơ cấu bằng loại nhóm
cao nhất
Cụ thể: Cơ cấu loại 1 là cơ cấu chỉ gồm khâu dẫn nối với giá.
* Nguyên lý tạo thành cơ cấu nhóm Atxua:
Mỗi cơ cấu gồm 1 hoặc nhiều khâu dẫn nối với giá và số nhóm có bậc tự do
= 0
W = W + 0 + 0 + 0 + + 0
Ta xét sự khác nhau giữa các cơ cấu nghĩa là xét sự khác nhau của các nhóm
có W = 0 (Những nhóm này đ-ợc gọi là nhóm Atxua)
- Theo Atxua những nhóm này là tối giản, không đ-ợc tách thành nhữg
nhóm đơn giản hơn.
- Nhóm phải tĩnh định, khi cố định các khớp chờ nó trở thành một giàn tĩnh
định.
Câu 5: Nêu nguyên tắc thay thế khớp cao bằng khớp thấp? Cho ví dụ:
* Nguyên tắc thay thế khớp cao bằng khớp thấp:
3
Trong cơ cấu phẳng nếu cơ cấu có khớp cao thì ta có thể thay thế khớp cao
bằng khớp thấp và chuyển cơ cấu sang cơ cấu toàn khớp thấp để xếp loại. Việc thay
thế phải đảm bảo quy luật chuyển động của khâu dẫn, khâu bị dẫn không đổi đồng
thời bậc tự do không đổi.
Các b-ớc thay thế:
- Xác định tâm cong của 2 thành phần khớp cao
- đặt hai chốt tại hai tâm cong
- Nối hai khớp vào 1 khâu.
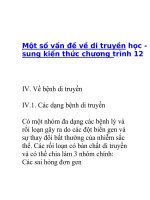
* Ví dụ: Xét ví dụ hình bên. Đây là cơ
cấu có khớp cao cấp gồm hai đĩa tròn mà
trục quay không trùng với tâm. Khi cho
đĩa 1 quay, đĩa 2 cũng quay theo với một
quy luật nào đó. Có thể thấy rằng trong
chuyển động trên, hai tâm A, B của hai
đĩa tròn luôn cách nhau một khoảng cố
định l = r1 + r2 và đ-ờng AB là pháp
tuyến chung của hai thành phần khớp
cao cấp tại chỗ tiếp xúc. Nh- vậy nếu tại
A, B đặt hai chốt bản lề rồi dùng một
thanh có 3 chiều dài bằng l = r1 + r2 lắp hai đầu vào hai chốt bản lề này thì cơ cấu
vẫn chuyển động nh- cũ đ-ợc, không bị ràng buộc gì cả. Theo quan điểm đã nêu
trong phần bậc tự do của cơ cấu thì khâu 3 và hai khớp A, B tạo nên một ràng buộc
thừa, hoặc nếu ta xét cơ cấu 4 khâu bản lề gồm các khâu động 1, 2, 3 thì khớp cao
cấp C ở giữa khâu 1, 2 cũng tạo nên một ràng buộc thừa. Vì là ràng buộc thừa nên
ta có thế phá khớp cao cấp C đi mà chuyển động của khâu 2 vẫn không đoỏi khi giữ
nguyên chuyển động của khâu 1. Nói cách khác chuyển động của khâu 2 trong cơ
cấu bốn khâu bản lề O
1
ABO
2
hoàn toàn giống nhau nên khâu 1 của chúng có cùng
một quy luật chuyển động. Nh- vậy cơ cấu bốn khâu bản lề toàn khớp sơ cấp
O
1
ABO
2
có thể dùng để thay thế cho cơ cấu có khớp cao cấp gồm hai đĩa tròn
O
1
CO
2
Ta có thể thấy:
- Về bậc tự do của cơ cấu, ta đã thay khớp cao cấp vốn có một ràng
buộc bằng nhóm gồm một khâu hai khớp sơ cấp có số bậc tự do bằng:
W = 3n 2p
5
= 31 - 22 = -1
Tức là cũng có số ràng buộc bằng một (bậc tự do âm là ràng buộc).
- Về quy luật chuyển động, ta đặt các khớp bản lề tại tâm các vòng
tròn, tức là tâm cong của các thành phần khớp cao cấp, do đó đảm bảo vận tốc, gia
tốc không đổi.
Tóm lại, nguyên tắc thay thế là dùng một khâu hai khớp bản lề đặt các bản lề
tại các tâm cong của các thành phần khớp cao cấp.
Câu 6: Định nghĩa cơ cấu toàn khớp thấp, nêu -u nh-ợc điểm của chúng so với
cơ cấu có khớp cao?
* Định nghĩa: Những cơ cấu phẳng trong đó các khớp động nối các khâu là
khớp thấp, gọi là cơ cấu phẳng toàn khớp thấp (cơ cấu phẳng th-ờng dùng là cơ cấu
loại 2)
* -u nh-ợc điểm so với cơ cấu có khớp cao
4
- Vì các khớp động nối các khâu là khớp thấp nên có khả năng truyền
lực lớn (diện tích tiếp xúc bề mặt lớn, lâu mòn). Chính vì vậy cơ cấu toàn khớp thấp
th-ờng đ-ợc dùng làm cơ cấu truyền lực
- Kết cấu đơn giản, dễ chế tạo nên giá thành hạ
- Có thể thực hiện đ-ợc quy luật chuyển động bất kỳ của khâu bị dẫn
nh-ng phải dùng nhiều khâu. Do vậy sai số tích luỹ do chế tạo, lắp ráp lớn.
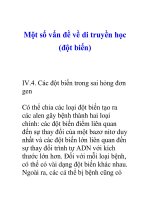
Câu 7: Xác định tỷ số truyền của cơ cấu 4 khâu bản lề phẳng (Định lý Kennơdy
Và Vilit)
* Tỷ số truyền là tỷlệ giữa các vận tốc góc của các khâu
- Xét cơ cấu 4 khâu bản lề (hình
vẽ).Giả sử khâu dẫn 1 (AB)quay với vận
tốc góc
1
khâu bị dẫn 3(CD) quay với vận tốc góc
3 .Ta có tỷ số giữa khâu 1 và khâu 3 là
:
i
13
= 1/3
- Để tìm tỷ số truyền i13 dùng
ph-ơng pháp hoạ đồ véc tơ cũng có thể
tìm đ-ợc song mỗi bài toán chỉ cho giá
trị tỷ số truyền ở một vị trí, không tổng quát, tốn thời gian. Ng-ời ta đã dùng
ph-ơng pháp tâm quay tức thời để tìm nhanh giá trị của tỷ số truyền.
* Định lý Kennơđy
- Giả sử ng-ời khảo sát đứng trên khâu 1 để xét chuyển động t-ơng đối của
khâu 3 thì cả khâu 1 và khâu 3 đều quay t-ơng đối quanh tâm vận tốc tức thời
P13
- Trong cơ cấu 4 khâu bản lề tâm quay tức thời của hai khâu quay là giao của
khâu 2 và khâu nối giá, tâm quay tức thời của 2 khâu nối giá là 2 khâu còn lại.
* Định lý Vilit.
-Do tính chấtcủa tâm quay tức thời ta có: Vp1 =Vp3
Vp
1
=
1
.PO
Vp
3
=
3
.PD
Suy ra :
1
.PO =
3
.PD
i13 =
1
/
3
= PD/PO
Trong đó O và D cố định, P thay đổi phụ thuộc vào vị trí khâu 2. Trong cơ
cấu 4 khâu bản lề,đ-ờng thanh truyền chia đ-ờng giá thành 2 đoạn tỷ lệ nghịch với
vận tốc góc của 2 khâu còn lại: i13 =
1
/
3
=PD/PO
Câu 8: Trình bày đặc điểm của cơ cấu tay quay con tr-ợt.
Đặc điêm động học của cơ cấu tay quay con tr-ợt gồm các đặc điểm sau:
1. Đặc điểm truyền động
a- Đ/N : Là cơ cấu dùng để biến chuyển động quay liên tục của khâu dẫn thành
chuyển đông tịnh tiến của khâu bị dẫn
b- Tỷ số truyền.
Xác định tâm quay tức thời của khâu
1,3 P(1,3) có Vp
1
= Vp
3
1
.PO
=Vp
3
i13 = 1/Vp
3
= 1/PO
Mặc dù khâu 1 quay đều với
1=const,
nh-ng khâu 3 tịnh tiến không đều bởi vì
o
5
khi khâu 1 quay đều với 1 = const thì sẽ có những vị trí khâu 1 và khâu 2 cùng giữ
thẳng hoặc khâu 1 và khâu 2 chập nhau P
O do đó 3 = 0 ,khâu 3 lúc đó sẽ ở vị
trí tận cùng bên phải hay tận cùng bên trái (vì tới đây nó dừng lại )
c- Đặc điểm của chuyển động: Trong 1 vòng quay ứng với hai vị trí đặc biệt của con
tr-ợt :
-Thanh truyền và tay quay giữ thẳng OA1B1 và OA2B2, B1B2 = H gọi là
hành trình con tr-ợt
-Hệ số àm việc: K =
lv/ck =180 /180 hệ số vẽ nhanh cơ cấu
1. Điều kiện quay toàn vòng
Có: A1 quĩ tích
(0,l1)
A2 mặt phẳng
(x1x1,x2x2)
Muốn A1 quay toàn vòng thì
phải nằm gọn trong . Vậy điêu kiện quay toàn vòng
là :
l1 < l2 - e khi e = 0 thì l1 < l2
Câu 9: Trình bày đặc điểm của cơ cấu Culít
Trả lời:
1. Đặc điểm truyền động
a. Đ/N: Là cơ cấu dùng để biến chuyển động quay liên tục của khâu bị dẫn
thành chuyển động quay , lắc hoặc quay đều của thanh Culít
b. Tỷ số truyền:
Xác định tâm vận tốc tức thời P(1,3) tâm quay tức thời Vp
1
= Vp
2
1
.PO
1
=
3.
PB
i
13
=
1
/
3
=PB/PO
1
Khi l
1
< l
0
i
13
=
1
/
3
= PB/PO
1
cont
mà
1
= con t ,nên
3
cont
1
>
3
Khi l
1
= l
0
i
13
=
1
/
3
=PB/PO
1
=2
1
= 2
3
=u
l
1
> l
0
i
13
=
1
/
3
=PB/PO
1
const
Tức là cả khâu 1,3 đều quay toàn vòng
2. Điều kiện quay toàn vòng
Nh- trên ta thấy: l
1
< l
0
thì khâu 1 quay toàn vòng, khâu 3 quay lắc
l
1
= l
0
thì cả 2khâu đều quay toàn vòng
l
1
> l
0
thì cả 2khâu đều quay toàn vòng
3. Hệ số năng suất :
K =
lv
/
ck
= 180
0
+
/180
0
-
Câu 10: Em hiểu thế nào là điều kiện quay toàn vòng động học của khâu nối
giá? Nêu một ví dụ cho cơ cấu bốn khâu bản lề phẳng ?
Trả lời:
+) Điều kiện quay toàn vòng động học của khâu nối giá: một khâu ối giá đợc coi là
quay toàn vòng khi nó cóthể quay quanh giá một số vòng quay tuỳ ý theo một
chiều quay tuỳ chọn.
+)Cho cơ cấu bốn khâu bản lề OABC có OA = l
1
,AB = l
2
,BC = l
3
.Hãy xét quỹ đạo
quay toàn vòng động học của khâu OA. (h.3)
Tháo khớp A:khi đó quỹ đạo điểm A
1
là đờng tròn tâm O bán kính OA =l
1
.
Quỹ đạo điểm A
2
là hình vành khăn với: R
ngoài
= l
2
+ l
3
R
trong
= / l
2
l
3
/
Vì A
1
luôn nối với A
2
do đó để A
1
quay toàn vòng thì .Nghĩa là quỹ tích A
1
phải nằm gọn trong miền với của thanh truyền kề nó.
6
Vậy : l
1
+ l
2
< l
0
+ l
3
(1)
/ l
1
l
0
/ > /l
3
l
2
/ .
Đây chính là điềukiện quay toàn vọng động học của khâu dẫn OA.Tức là với điều
liện này thì khâu dẫn OA sẽ có thể quay quanh giá một số vòng tuỳ ý và theo một
chiều quay tuỳ chọn.
(nh-ng ở đây là ch-a kể đến ảnh hởng hay tác dụng của các lực nh- lực ma sát,lực
quán tính,
Câu 11: Định nghĩa và phân loại cơ cấu cam ?Nêu các thông số hình học và
động học của cơ cấu cam ?
Trả lời:
+)Cơ cấu cam là cơ cấu có khớp cao ,dùng để tạo nên chuyển động qua lại theo quy
luật cho khâu dẫn của cơ cấu này gọi là cần,còn khâu dẫn gọi là cam.
Cơ cấu cam phẳng là cơ cấu cam trong đó cam và cần chuyển động trong cùng môt
mặt phẳng hay trong ngững mặt phẳng song song với nhau.
(Trong cơ cấu cam ,cam và cần đợc nối với giá bằng khớp thấp và đợc nối với nhau
bằng khớp cao.Khớp nối giá của cam là khớp quay.Tâm của khớp quay này gọi là
tâm cam.Cũng có trờng hợp cam đợc nối với giá bằng khớp trợt.Khi cần đợc nối với
giá bằng khớp trợt ta có cơ cấu cam cần đẩy,cồn khi nối với giá bằng khớp quay ta
có cơ cấu cam cần lắc)
+)Phân loại:cơ cấu cam đợc chia thành 2 loại là cơ cấu cam phẳng và cơ cấu cam
không gian.
a)Cơ cấu cam phẳng: (h.4)
-)Dựa vào loại cam:
- Cam chuyển động quay
a
b
d
f
7
- Cam chuyển động tịnh tiến
-)Dựa vào dạng của cần:
- Cần bằng
- Cần lồi
- Cần nhọn
- Cần đáy con lăn
-)Dựa vào dạng chuyển động:
- tịnh tiến
- quay lắc
b)Cơ cấu cam không gian:là cơ cấu mà cam và cần chuyển động không cùng trong
mặt phẳng.Gồm:- Cam trụ
- Cam nón
- Cam thùng
+)Các thông số hình học và động học của cơ cấu cam bao gồm:
- Các góc công nghệ:góc công nghệ đi xa ,góc công nghệ đứng ở xa ,góc
công nghệ về gần , góc công nghệ đứng ở gần và lần lợt ký hiệu
là:r
đi
,r
xa
,r
về
,r
gần
.
- Các góc quay của cam ứng với các giai đoạn chuyển động khác nhau của
cần đợc gọi là các góc định kỳ.Có bốn góc định kỳ là :góc định kỳ đi xa
,góc định kỳ đứng ở xa ,góc định kỳ về gần ,góc định kỳ đứng ở gần .Các
góc định kỳ này lần lợt đợc ký hiệu là: f
a1
, f
a2
, f
a3
, f
a4
.
Các góc định kỳ đứng ở xa và đứng ở gần cũng nh các góc công nghệ đứng ở xa và
đứng ở gần có thể có giá trị bằng không nhng các góc định kỳ đi xa ,về gần và các
góc công nghệ đi xa ,về gần nhất thiết phải khác không:
f
a1
0, f
a3
0, r
đi
0, r
về
0
Góc định kỳ và góc công nghệ là hai khái niệm khác nhau :Góc công nghệ là một
thông số hình học của cam còn góc định kỳ là một thông số động học của cơ cấu
cam.Ta luôn có : f
a2
= r
xa
;
f
a4
= r
gần
nhng nói chung : f
a1
r
đi
; f
a3
r
về
- Khoảng cách giữa tâm cam và cần và phơng của cần đẩy đợc gọi là tâm
sai
.Khi tâm sai bằng không ( = 0) ta có cơ cấu cam cần đẩy chính tâm
,còn khi tâm sai khác không (
0) ta có cơ cấu cam cần đẩy lệch tâm.
- Góc áp lực là góc hợp bởi phơng áp lực từ cam chuyển sang cần và vận
tốc của điểm theo cần.
Câu 12: Nêu nguyên tắc xác định đờng cong biên dạng cam theo phơng pháp
đổi giá?Biên dạng cam phụ thuộc các thông số nào?
Trả lời:
Nguyên tắc xác định đ-ờng cong biên dạng cam theo phơng pháp đổi giá:
Câu 13: Định nghĩa góc áp lực của cơ cấu CAM và ảnh h-ởng của góc áp lực
tới truyền động và kích th-ớc của cơ cấu?
* Định nghĩa góc áp lực:
8
Giả sử ta có cơ cấu CAM cần
lắc đáy nhọn đang làm việc ở giai
đoạn đi xa
Tại B xác định áp lực từ CAM
truyền sang cần là
N
, vẽ vận tốc
2B
V
),(
2B
VN
gọi là góc áp
lực
ĐN: Góc áp lực là góc hợp bởi ph-ơng của áp lực truyền sang cần và vận tốc
của điểm theo cần.
*
ảnh h-ởng của góc áp lực tới truyền động của cơ cấu CAM:
Ta có W= P.V
B2
(Công suất)
W = p.V
B2
Cos( + )
: Góc ma sát ( = const).
=> Khi
càng nhỏ thì áp lực nhỏ => W tăng.
Khi
lớn ( + = 90
o
) => W = 0
Giả sử trên cần 2 chịu tác dụng của tải trọng là mômen cản M
C
, chiều dài cần
là l
C
, bỏ qua ma sát ở khớp C.
Xét cân bằng cần 2: (P, M
C
, R
C
) 0
Z
mc
(F
k
) = P.l
C
.Cos( + ) - M
C
= 0
=> P = M
C
/(l
C
.cos(+))
M
C
= const; l
C
= const; = const => P phụ thuộc vào .
Nếu
giảm dẫn đến P giảm, lực đẩy từ CAM sang cần ngày càng nhỏ nên cơ
cấu dễ truyền động.
Do vậy về mặt thiết kế ng-ời ta mong muốn
ngày càng nhỏ càng tốt
*
ảnh h-ởng của góc áp lực đến kích th-ớc của cơ cấu CAM:
Vẽ hoạ đồ vận tốc của cơ cấu CAM.
V
B2
= V
B1
+ V
B2/B1
P = M
C
/(l
C
.cos( + )) (1)
Từ B kẻ BN vuông góc với V
B2/B1
kéo dài
Xét sự phụ thuộc của R vào
: Tam giác vuông AHB Tam giác vuông
BNV
B1
=> AH/AB = BN/BV
B1
(R.cos)/R = (V
B2
.cos)/V
B1
= (l
C.
..(d/d).cos)/(
1
.R)
R = (l
C
.(d/d).cos)/cos (2)
Vậy khi
giảm dẫn đến R tăng nên kích th-ớc CAM lớn, về mặt thiết kế thì
R phải nhỏ
Từ (1) và (2) tính đ-ợc góc áp lực cho phép dễ truyền động, kích th-ớc nhỏ
Câu 14: Tại sao phải bảo toàn khớp cao? Nêu các biện pháp bảo toàn khớp cao?
* Tại sao phải bảo toàn khớp cao?
9
- Khi muốn thực hiện một chuyển động phức tạp nào đó của khâu bị dẫn, nếu
dùng cơ cấu toàn khớp thấp thì phải dùng nhiều khâu nên sai số lớn. Do vậy để đảm
bảo yêu cầu kỹ thuật ng-ời ta phải bảo toàn khớp cao.
- Cơ cấu có khớp cao có thể biến chuyển động quay liên tục của khâu dẫn
thành chuyển động theo một quy luật bất kỳ nào đó của khâu bị dẫn nếu nh- biên
dạng CAM đ-ợc chọn một cách thích hợp.
- Có năng suất cao nếu quy luật chuyển động của cần đ-ợc chọn một cách
thích hợp.
* Các biện pháp bảo toàn khớp cao:
Trong cơ cấu cam khi khối l-ợng của cần không đủ lớn để ép cần luôn tiếp
xúc với mặt cam ng-ời ta phải dùng một lò xo có độ cứng vừa đủ để sinh ra lực đàn
hồi ép cần luôn tiếp xúc với mặt cam. Ph-ơng pháp đó gọi là biện pháp bảo toàn
khớp cao.
Câu 15: Phát biểu và chứng minh định lý ăn khớp?
* Phát biểu: (Wilis 1837):
Muốn tỷ truyền không đổi ,
pháp tuyến chung của cặp biên
dạng đối tiếp phải cắt đ-ờng nối
tâm tại một điểm cố định.
* Chứng minh:
Xét một điểm trên đ-ờng
tiếp xúc giữa hai cặp bánh răng ăn
khớp (hình vẽ)
Xét cặp biên dạng (b
1
, b
2
)
đang ăn khớp tại k
- Gọi nn là pháp tuyến chung
- Gọi k là điểm tiếp xúc của 2 thanh ( K
1
K
2
K). Bánh 1 tỳ liên tục lên
bánh 2
- Để b
1
đẩy b
2
liên tục trên đ-ờng pháp tuyến chung nn nghĩa là k
1
k
2
= 0
Nghĩa là vận tốc của chúng theo ph-ơng pháp tuyến chung là nh- nhau
V
k1
n
= v
k2
n
(1)
V
k1
cos
1
= V
k2
cos
2
1
.O
1
K.cos
1
=
2
.O
2
Kcos
2
1
.O
1
N
1
=
2
.O
2
N
2
1
/
2
= O
2
N
2
/O
1
N
1
=> i
12
=
1
/
2
= O
2
N
2
/O
1
N
1
= O
2
P/O
1
P (2)
Vì O
1
O
2
cố định => muốn i
12
=
1
/
2
= const => P là điểm cố định (đpcm).
Câu 16: Định nghĩa, viết ph-ơng trình đ-ờng thân khai của vòng tròn ? Chứng
minh biên dạng răng thân khai thoả mãn định lý ăn khớp.
Trả lời:
a. Định nghĩa: Khi cho 1 đ-ờng thẳng lăn không tr-ợt trên đ-ờng tròn , quỹ
đạo của điểm K nào đó trên đ-ờng thẳng gọi là đ-ờng thân khai của nó.
b. Yính chất: Từ sự hình thành đ-ờng thân khai ta suy ra:
-Đ-ờng thân khai không có điểm nào nằm trong vòng co sở .
-Pháp tuyến của đ-ờng thân khai là tiếp tyến của vòng cơ sở và ng-ợc lại.
nn(thân khai)
tt( r
0
)
P
O
K K
K
O
2
1
1 2
V
V
K1
K2
b
b
2
1
10
Tâm cong N tại điểm K của đ-ờng thân khai nằm trên vòng tròn cơ sở và bán
kính cong NK = NM
-Các đ-ờng thân khai cùng 1 vòng tròn cách đều nhau có thể chồng
khít nhau
-Khoảng cách giữa chúng bằng độ dài cung giữa gốc của chúng
c. Ph-ơng trình đ-ờng thân khai
Để biểu diễn ph-ơng trình đ-ờng thân khai, ng-ời ta th-ờng dùng một hệ
ph-ơng trình tham số trong hệ tọa độ cực .
Giả sử có một điểm K trên đ-ờng thân khai
MiOKx
OKrx
Ta có: r
x
= r
0
/cos
x
NOM
1
-
x
x
rNMi /
0
-
x
x
NK/r
0
-
x
= tg
x
-
x
.
Suy ra ph-ơng trình của đ-ờng thân khai là:
invexxtgx
rorx
cos/
(Hàm thân
khai)
r
0
: bán kính vòng cơ sở
a. Chứng minh biên dạng răng thân khai thoả mãn định lý ăn khớp.
Lấy 2 bánh răng có cạnh răng là đ-ờng thân khai và cho 2 cạnh răng tiếp xúc
với nhau tại 1 điểm bất kỳ M. Qua điểm tiếp xúc , có thể kẻ đ-ờng pháp tuyến
chung cho 2 cạnh răng. Do tính chất của đ-ờng thân khai pháp tuến chung vừa vẽ
cũng là tiếp tuyến chung của vòng cơ sở 1 và vòng cơ sở 2, vì các vòng cơ sở có
tâm, bán kính cố định, nên tiếp tuyến chung của chúng có 1 vị trí cố định, và cắt
đ-ờng nối hai tâm ở điểm P cố định: b
1
, b
2
đang ăn khớp trong N
1
N
2
ta chứng
minh nn cắt O
1
O
2
tại P
Nh- vậy đ-ờng pháp tuyến chung cho 2 cạnh răngthân khai, tại bất kỳ vị trí tiếp
xúc nào đều chạy qua một điểm cố định trên đ-ờng nối hai tâm. Biên dạng răng
thân khai do đó phù hợp với định lý cơ bản về ăn khớp
Câu 17: Thế nào là điều kiện ăn khớp đều? Nêu và chứng minh điều kiện ăn
khớp đúng và trùng?
Trả lời:
1. Điều kiện ăn khớp đều là: ăn khớp liên tục với một tỷ số truyền cố định và
phải thoả mãn ba điều kiện: - Ăn khớp đúng
- Ăn khớp trùng
- Ăn khớp khít
2. Nêu và chứng minh điều kiện ăn khớp đúng và trùng
+ Điều kiện ăn khớp đúng nghĩa là đảm bảo sao cho trên đ-ờng ăn khớp các
cặp biên dạng đối tiếp cùng phía lần l-ợt đôi một vào tiếp xúc với đ-ờng ăn
khớp.
+ Điều kiện ăn khớp trùng nghĩa là đảm bảo trên đ-ờng ăn khớp thực lúc nào
ít nhất cũng có một đôi răng đang ăn khớp.
Chứng minh:
11
a. Điều kiện ăn khớp đúng: Xét một cặp bánh răng ăn khớp, các cạnh răng nối
tiếp nhau làm việc, rõ ràng là b-ớc răng đo trên đ-ờng ăn khớp của hai bánh
răng phải bằng nhau(h.vẽ), nếu không sẽ bị hẫng. trong tr-ờng hợp thứ hai khi
cặp bánh răng teứơc ra khớp thì cặp bánh răng sau vốn ch-a tiếp xúc vớinhau sẽ
va đập vào nhau. Gọi t
N1
,t
N2
là b-ớc răng của các bánh răng ăn khớp với nhau,
đo trên đ-ờng ăn khớp ta phải có : t
N1
= t
N2
Do tính chất đ-ờng thân khai: t
N1
= t
01
, t
N2
= t
o2
do đó : t
o1
= t
02
(đ/k ăn khớp
đúng)
t
01
,t
02
là các b-ớc răng đo trên vòng cơ sở.
b. Điều kiện ăn khớp trùng.
Điều kiện ăn khớp ăn khớp chính xác ch-a đủ đảm bảo ăn khớp êm, vì khi xét
điều này ta không chú ý rằng các cạnh răng có chiều cao giới hạn. Nếu chú
ýrằng chiều cao răng giới hạn có thể thấy ngay là khi dã ăn khớp chính xác, các
cặp răng vẫn có thể không nối tiếp nhau làm việc liên tục, nếu 1 cặp răng ở vị trí
ra khớp rồi, mà cặp tiếp theo ch-a vào khớp tức là đoạn B
1
B
2
bé hơn t
N
. Nếu
chiều cao râng lớn hơn nữa thì sự ăn khớp sẽ liên tục trong tr-ờng hợp này ta có
B
1
B
2
'
lớn hơn t
N
.
Do đó phải đảm bảo điều kiện trùng khớp tức là: B
1
B
2
> t
N
hay
=B
1
B
2
/t
N
=B
1
B
2
/t
0
1
: là hệ số trùng khớp
Câu18: Nêu các ph-ơng pháp chế tạo bánh răng thân khai? Các thông số chế tạo cơ
bản?
Trả lời: Hiện nay có 2 ph-ơng pháp chế tạo bánh răng thân khai là ph-ơng pháp
chép hình và bao hình
-P
2
chép hình : là ph-ơng pháp cắt biên dạng của dao giống hệt biên dạng
răng,phù hợp với khi cắt bánh răng.
-P
-
2
bao hình : là ph-ơng pháp mà biên dạng răng đ-ợc tạo thành là hình bao
của vết l-ỡi cắt, biên dạng l-ỡi cắt khác biên dạng răng.
Các thông số chế tạo cơ bản: gồm có 4 thông số cơ bản.
1. Bán kính vòng chia.
Khi xét sự ăn khớp giữa dao thanh răng và bánh răng cần cắt, đ-ờng chia trên
dao thanh răng tiếp xúc với vòng lăn tại P.
- Vòng tròn lăn gọi là vòng chia R =Vdao/
0
Đ-ờng trên dao thanh răng là đ-ờng chia có: R = R
0
/co
t
Vì vòng chia lăn không tr-ợt trên đ-ờng chia do vậy số vòng cần cắt trên fôi
liên quan trực tiếp đến mô đun.
2. Mô đun: Gọi số bánh răng đ-ợc cắt là Z, b-ớc răng t
x
, Chu vi Zt =2.
.R
R =Zt/2
Đặt t /
= m
R =Zm/2
D =Zm.
Mô đun là thông số đặc tr-ng cho kích th-ớc của răng.
2. Góc áp lực trên vòng chia.
t =
(
là góc ăn khớp).
co
t
=R
0
/R
R
0
=Rco
t
.
Khi
t
thay đổi thì R
0
thay đổi và biến dạng thân khai thay đổi do vậy góc
áp lực trên vòng chia ảnh h-ởng trực tiếp đến biên dạng răng, các bánh răng
đ-ợc cắt bằng những con dao có góc áp lực khác nhau thì sẽ tạo ra các biên
dạng khác nhau.
12
Hai bánh răng muốn ăn khớp đ-ợc với nhau thì phải cắt bằng cùng một
con dao. Để tiện cho việc sử dụng khi chế tạo ccác con dao mô đun đ-ợc tiêu
chuẩn hoá và xếp theo nhóm.
3. Hệ số dịch dao.
- Dịch dao 0 hay dịch dao tiêu chuẩn:
0;0
;
là khoảng dịch dao
: hệ số dịch dao.
- Dịch dao d-ơng: dao lùi so với phôi một khoảng
)0(0
m
- Dịch dao âm:
00
m .
Câu 19: Thế nào là bánh răng tiêu chuẩn và dịch chỉnh?Nêu ảnh hởng của hệ
số dịch dao đến biên dạng răng?
Trả lời:
+)Bánh răng tiêu chuẩn là bánh răng có hệ số dịch dao
= 0 tức là độ dịch dao của
nó
= 0.Chiều rộng răng s và chiều rộng rãnh răng w trên vòng chia của bánh răng
tiêu chuẩn là bằng nhau.
+)Bánh răng dịch chỉnh là bánh răng có hệ số dịch dao
0 tức là độ dịch dao của
nó
#0.Khi > 0 ta có bánh răng dịch dao dơng,còn khi < 0 ta có bánh răng
dịch dao âm.Còn chiều rộng răng s và chiều rộng rãng răng w trên vọng chia của
bánh răng dịch chỉnh là khác nhau.
+)
ảnh hởng của hệ số dịch dao đến biên dạng răng:Nh ta biết thì hệ số dịch dao có
ảnh hởng rất lớn tới biên dạng răng thân khai.
- Nếu ta dịch dao không (dịch dao tiêu chuẩn) tức là hệ số dịch dao = 0
thì ta đợc biên dạng dao chuẩn.
- Khi ta dịch dao dơng quá nhiều (dao lùi xa tâm phôi một khoảng khá
lớn)
=m khá lớn thì mặc dù biên dạng răng vẫn là đờng thân khai đó
nhng sẽ là những đoạn khác ở ngoài đỉnh răng .Cho đến khi chiều dày
đỉnh răng
0,4 xẽ gây ra hiện tợng nhọn răng.Hiện tợng nhọn răng làm
tăng hiện tợng trợt, giảm hiệu suất truyền.Để tránh nhọn răng S
C
0,4M
- Khi ta dịch dao dơng quá nhiều là dao tiến gần vào tâm phôi xẽ gây ra
hiện tợng cắt chân răng làm giảm khả năng chịu lực của bánh răng.
Câu 20: Trình bày hiện t-ợng cắt chân răng cho cặp bánh răng thân khai , lập
công thức tính số răng tối thiểu?
Trả lời:
+)Hiện tợng cắt chân răng của cặp bánh răng thân khai :trong quá trình tạo hình
răng thân khai bằng thanh răng sinh quỹ tích của vị trí tiếp xúc của cạnh thanh
răng và biên dạng thân khai là đ-ờng tiếp tuyến PN của vòng tròn cơ sở kẻ qua tiếp
điểm P của đờng chia tt
và vòng chia C
(hình.15).Đờng PN đợc
gọi là đờng ăn khớp của
quá trình tạo hình.Khi
tạo hình nếu ta để cho
đ-ờng đỉnh lý thuyết
của thanh răng sinh cắt
đờng ăn khớp PN tại
một điểm nằm ngoài
13
đoạn PN thì sẽ xẩy ra hiện tợng cắt chân răng.Điều này cũng đồng nghĩa với việc
khi gá dao lui dần vào tâm phôi nghĩa là đờng đỉnh răng thanh răng vợt qua N khi
đó đỉnh dao sẽ cắt lẹm vào chân răng gây ra hiện tợng cắt chân răng.
(Khi tiết diện của chân răng đợc cắt nhỏ quá một giới han quy định thì bánh răng
không còn khả năng chịu lực lớn nữa mà chịu lực rất kém).
+)Công thức tính số răng tối thiểu:Từ điểm N trên đ-ờng ăn khớp PN của quá rình
tạo hình biên dạng thân khai kẻ đờng thẳng Nv vuông góc với bán kính OP và cắt
OP tại H (hình.16).Để không xảy ra hiện tuợng cắt chân răng thì nh vừa phân tích ở
trên ,trong quá trình tạo hình đờng đỉnh lý thuyết của thanh răng sinh phải nằm
ngoài khoảng giữa đờng Pv này và tâm bánh răng O. Nói một cách khác đờng đỉnh
lý thuyết của thanh răng sinh không đợc đặt gần tâm O quá một giới hạn là đuờng
Pv.Điều này có nghĩa là ta phải có :
l < PH (17)
với l là khoảng cách giữa đờng đỉnh lý thuyết của thanh răng sinh và đờng chia.
Vì khoảng cách giữa đờng chia và đờng trung bình là độ dịch dao
= .m
t
còn
khoảng cách giữa đờng trung bình và đờng đỉnh lý thuyết bằng m
t
do đó:
L = m
t
(1- ) (17.a)
Mặt khác từ hình vẽ ta có :PH =
NPsin
O
= OPsin
2
O
Vì : OP = r = mz/2
nên : PH = mzsin
2
O
/2
(17.b)
Thay các công thức (17.a) và (17.b)
vào công thức (17) ta có :
l -
zsin
2
O
/2
(18)
Thông thờng theo tiêu chuẩn góc áp
lực của thanh răng
O
đợc lấy bằng
20
0
,do đó:
sin
2
O
= sin
2
(20
0
) 2/17
Thay giá trị này vào công thức (18) ta đợc:
l -
z/17 (18.a)
Nh vậy để không xảy ra hiện tợng cắt chân răng thì nếu nh đã cho trớc hệ số dịch
dao
,thì số răng của bánh răng phải lớn hơn một giá trị tối thiểu là :
z
min
=17(1- ) (18.b)
Công thức (18.b) chính là công thức để tính số răng tối thiểu.
Còn khi đã cho trớc số răng tối thiểu z
min
thì hệ số dịch dao phải lớn hơn hay bằng
một giá trị tối thiểu bằng :
min
= (17 z)/17
Câu 21: Thành lập phơng trình ăn khớp của cặp bánh răng thân khai?
Trả lời:
Phơng trình ăn khớp thực ra là phơng trình thể hiện mối tơng quan giữa một bên là
thông số ăn khớp và một bên là thông số chế tạo cơ bản (m ,z ,
,)
Cơ sở để thiết lập phơng trình ăn khớp là ngời ta dựa vào điều kiện ăn khớp đều của
cặp bánh răng.
Nghĩa là thoả mãn 3 điều kiện:
+)Ăn khớp đúng: t
N 1
= t
N 2
hoặc t
O 1
= t
O 2
câu 20
14
o
A
d2
d1
1,1
S
L 1
= S
L 2
Dựa vào điều kiện ăn khớp đúng khi ta cắt 2 bánh răng cùng một con dao ( cùng mô đun
và cùng góc áp lực
t
).
t
N 1
= t
N 2
suy ra t
O 1
= t
O 2
Với t
O 1
= m
1
cos
t
t
O 2
= m
2
cos
t
Bởi vậy ta phải có: m
1
= m
2
và
1
=
2
Dựa vào điều kiện ăn khớp: S
L
= W
L
với 2 bánh răng ta có:S
L 1
= W
L2
và S
L 2
= W
L 1
Mà t
L
=W
L 1
+ S
L 1
= W
L 2
+ S
L 2
S
L 1
+ S
L 2
= t
L
LL
invinvztgmS
1111
2
1
11
2
2cos
cos
(19)
LL
invinvztgmS
22212
1
2
22
2
2cos
cos
L
L
L
t
z
r
z
r
t
cos
cos.
cos.
cos.2
2
1
1
cos
cos
L
L
t
t
2
2
cos
cos
L
L
t
t
Thay S
L1
,S
L2
,t
L
vào công thức (19) ta có:
inv
zz
tg
inv
L
21
21
)(
2
(21)
Công thức (21) đợc gọi là phơng trình ăn khớp của cặp bánh răng thân khai
Câu 22: Thế nào là hiện t-ợng tr-ợt biên dạng? Lập công thức tính hệ số tr-ợt biên
dạng?
* Định nghĩa:
Khi hai biên dạng răng ăn khớp sẽ có hiện t-ợng tr-ợt t-ơng đối giữa chúng
và ng-ời ta gọi là hiện t-ợng tr-ợt biên dạng. Hiện t-ợng này là 1 trong những
nguyên nhân làm mòn bề mặt tiếp xúc răng, có thể làm cháy x-ớc bề mặt răng, ảnh
h-ởng đến chất l-ợng ăn khớp của chúng dẫn đến việc nghiên cứu hiện t-ợng tr-ợt
biên dạng rất cần thiết.
* Lập công thức tính hệ
số tr-ợt giữa chúng:
Trên hình vẽ ta xét
cặp răng b
1
, b
2
đang ăn
khớp nhau. Tại thời điểm
đầu chúng tiếp xúc nhau
tại điểm k, sau thời gian
t chúng đẩy nhau trên
đ-ờng ăn khớp đến điểm
K. Trên biên dạng răng
b
1
và b
2
tr-ợt t-ơng đối
với nhau, các cunglà
S
1
15
và S
2
(S
1
th-ờng khác S
2
)
Gọi hiệu
S = S
1
- S
2
đ-ợc gọi là độ mòn tuyệt đối
Gọi
S/S
1
và S/S
2
gọi là độ tr-ợt t-ơng đối
Gọi
2
12
2
12
0
2
1
21
1
21
0
1
lim
lim
dS
dSdS
S
SS
M
dS
dSdS
S
SS
M
t
t
(1)
M
1
, M
2
đ-ợc gọi là hệ số tr-ợt của biên dạng răng t-ơng ứng
dS
1
= KK
1
*
= W
1
K.d
1
dS
2
= KK
2
*
= W
2
K.d
2
i
12
=
2
1
d
d
=> d
2
= d
1
.i
21
Thay (2) vào (1) ta có:
KN
KN
iM
KN
KN
iM
2
1
122
1
2
211
.1
.1
(3)
Ta thấy M
1
, M
2
là hàm số của K (M
1
= M
1
(K); M
2
= M
2
(K)).
=> Có bảng sau:
* Nhận xét:
- Trong 2 bánh răng, bánh có đ-ờng kính nhỏ đ-ờng cong dốc hơn. Chứng tỏ
bánh nhỏ truợt nhiều hơn
- Trên một biên dạng răng, phần chân răng bao giờ cũng tr-ợt nhiều hơn
phần đỉnh răng.
M
chân
> M
đỉnh
=> các bánh răng sau thời gian làm việc thì chân răng mòn
nhiều hơn đỉnh răng.
Do vậy để ìm đ-ợc quy trình thay thế, sửa chữa hợp lý ta phải phối hợp lự
chọn vật liệu giữa hai bánh để đến thời kỳ thay thế chúng đều mòn nh- nhau.
- Khi thiết kế cố gắng chọn hệ số tr-ợt của 2 bánh là xấp xỉ nhau.
Câu 23: Nêu và viết các thông số chế tạo của bánh răng nghiêng?
Cũng giống nh- bánh răng thẳng, trong các bánh răng nghiêng những yếu tố
tr-ớc kia là điểm đ-ờng giờ trở thành đ-ờng, mặt.
Ngoài các thông số giống nh- trong bánh răng tiết diện còn có thêm các
thông số sau đây:
a) Chiều dầy bánh răng B
b) Góc nghiêng của răng trên vòng cơ sở
O
c) Góc nghiêng của răng trên vòng chia
Có thể thấy rằng góc ngiêng của răng trên mỗi hình trụ một khác. Thật vậy
b-ớc xoắn ốc thì duy nhất cho tất cả các hình trụ, nh-ng do đ-ờng kính khác nhau
nên góc ngiêng cũng khác. Ví dụ nếu gọi h là b-ớc xoắn ốc:
(2)
Vị trí K M
1
M
2
N
1
-
1
P 0 0
N
2
1
-
16
cos
cos
2
2
2
OO
O
O
tg
h
r
h
r
tg
h
r
tg
Do đó
cos
O
tg
tg
d) B-ớc ngang t
S
và mô đun ngang m
S
là những trị số b-ớc răng và môđun
răng đo trên tiết diện thẳng góc với trục bánh răng
z
d
m
z
d
t
SS
;
Trong đó d - đ-ờng kính hình trụ chia
z - số răng
e) B-ớc pháp t
n
, môđun pháp m
n
: Nếu cắt
bánh răng bằng một mnặt phẳng thẳng góc với
răng (tức là thẳng góc với đ-ờng răng xoắn ốc
trên hình trụ chia) sẽ đ-ợc một tiết diện hình elíp.
Mô đun và b-ớc răng đo trên tiết diện này và ở
vào chỗ đang ăn khớp gọi là môđun và b-ớc pháp
ký hiệu là m
n
và t
n
(hình vẽ)
m
n
= m
S
.cos
t
n
= t
S
.cos
f) B-ớc dọc t
a
là b-ớc răng đo theo chiều trục:
t
a
= t
S
sin
Câu 24: Thế nào là bánh răng thay thế của bánh răng trụ tròn răng nghiêng?
Tính số răng tối thiểu của bánh răng nghiêng?
Trong quá trình các bánh răng nghiêng ăn khớp lực tác động nằm trên mặt
phẳng nghiêng đi một góc
so với đ-ờng trục, tức là thẳng góc với đ-ờng răng ở
chỗ ăn khớp do đó khi xét sự ăn khớp giữa hai bánh răng nghiêng ng-ời ta xét trên
tiết diện thẳng góc với đ-ờng răng này. Tiết diện này cắt các hình trụ chia theo
những đ-ờng elíp. Có thể coi một cách gần đúng là hình elíp này, ở lân cận chỗ ăn
khớp, trùng với vòng tròn mật tiếp của nó tại đó. Nh- vậy có thể coi sự ăn khớp
giữa hai bánh răng nghiêng nh- sự ăn khớp giữa hai bánh răng thẳng có bán kính
bằng bán kính vòng mật tiếp nói trên. Hãy tính bán kính vòng tròn mật tiếp ở lân
cận chỗ ăn khớp, bán kính này chính là bán kính cong lớn nhất của elip
Bán kính cong lớn nhất của elip bằng:
b
a
2
Trong đó nửa trục lớn
cos
r
a
, nửa trục nhỏ b = r
Với
là góc nghiêng của răng trên hình trụ chia.
Bánh răng giả định có bán kính bằng bán kính vòng mật tiếp gọi là bánh răng thay
thế. Môđun trên bánh răng này là:
m
n
= m
S
.cos
Do đó số răng của nó bằng:
33
5
2
cos
1
cos.cos.
2
z
m
d
m
r
z
n
tt
t
t
o
n
17
Với z là số răng thật trên bánh răng
Số răng tối thiểu của một bánh răng đảm bảo không có hiện t-ợng cắt chân
răng là z
min
=17. Số răng tối thiểu của bánh răng thay thế cũng bằng 17.
Nh- vậy số răng tối thiểu của bánh răng nghiêng chỉ còn bằng: z
min
=
17.cos
3
Khái niệm bánh răng thay thế này cho phép ta quy việc tính toán các cặp
bánh răng nghiêng về việc tính toán các cặp bánh răng thẳng.
Câu 25: Trình bày đặc điểm ăn khớp của cặp bánh răng nghiêng?
Trong quá trình các bánh răng nghiêng ăn khớp lực tác động nằm trên mf nghiêng
đi một góc
so với đ-ờng trục, tức là thẳmg góc với đ-ờng răng ở chỗ ăn khớp, do
đó khi xét sự ăn khớp giữa hai bánh răng nghiêng ta xét trên tiết diện thẳng góc với
đ-opừng răng này. tiết diện này cắt các hình trụ chia theo đ-ờnh elip. Có thể coi
gần đúng là hình elip ở lân cận chỗ ăn khớp, trùng với vòng tròn mật tiếp của nó tại
đó . Nh- vậy có thể coi sự ăn khớp giữa hai bánh răng nghiêng nh- của bánh răng
thẳng có bán kính bằng bán kính vòng mật tiếp nói trên. Bán kính vòng tròn mật
tiếp ở lân cận chỗ ăn khớp chính là bán kính cong lớn nhất của elip:
= a
2
/b.
Trong đó nửa trục lớn là: a = r/cos
.
nửa trục nhỏ : b = r.
Do đó
= cos
2
Với : là góc nghiêng cuarawng trên hình trụ chia.
Câu 26: Lập công thức tính tỷ số truyền của cặp bánh răng trụ chéo?.
Cơ cấu bánh răng trụ chéo là cơ cấu bánh răng trụ tròn răng nghiêng dùng để
truyền chuyển động giữa 2 trục chéo nhau.
Gọi tt là tiếp tuyến chung của 2 đ-ờng răng a
1
và a
2
, tiếp tuyến này nằm trên
mf P là tiếp diện chung của 2 mặt lăn.Các góc
1
,
2
là góc nghiêng của răng
trên mỗi bánh,góc giữa 2 đ-ờng sinh p
1
,p
2
là góc chéo giữa 2 trục.
Vậy:
1
+
2
=
. Đ-ờng 0
1
0
2
thẳng góc với 2 trục, qua P là đ-ờng nối tâm.
0
1
0
2
= A =O
1
P + O
2
P = r
1
+ r
2
.
Gọi
1
,
2
là vận tốc góc của bánh 1,2. tại P có: v
p1
=
1
r
1
; v
p2
=
2
r
2
.
Vì 2 trục không // nên v
p1
v
p2
.Xéy c/động t-ơng đối giữa 2 điểm P
1
, P
2
ta có:
v
p2
= v
p1
+ v
P21
v
p1
co
1
= v
p2
co
2
=PH = v
n
Hay:
1
r
1
co
1
=
2
r
2
co
2
i
12
=
1
/
2
= r
2
co
2
/r
1
co
1.
Gọi m
s1
, m
s2
và z
1
, z
2
là mô đun ngang và số răng của 2 bánh. do điều kiện
ăn khớp chính xác: b-ớc pháp tuyến t
n
cũng tức là mô đun pháp m
n
của 2
bánh răng phải bằng nhau. Vì vậy ta có: i
12
= m
s2
z
2
co
2
/m
s1.
z
1
co
1
= m
n
z
2
/m
n
z
1
= z
2
/z
1
.
Từ đó ta có công thức của tỷ số truyền là :
i
12
=
1
/
2
= r
2
co
2
/r
1
co
1
= z
2
/z
1
.
Câu 27: Em hiểu thế nào là bánh răng thay thế của bánh răng nón? Tính số
răng tối thiểu của bánh răng nón? Nêu các thông số chế tạo cơ bản?
1. Bánh răng thay thế của bánh răng nón.
Ta biết quá trình ăn khớp của hai bánh răng nón cũng là quá trình ăn khớp
của hai bánh răng hình phễu ở mặt nón phụ. Khai triển hai bánh răng hình
18
phễu này trên mf tiếp xúc chung của chúng đ-ợc hai bánh răng hình quạt với
bán kính vòng chia t-ơng ứng bằng : r
1
' = r
1
/cos
1.
r
2
' = r
2
/cos
2
.
Nếu đ-ợc bổ xung đầy đủ vào chỗ khuyết thì hai bánh răng này sẽ có số răng là:
z
1
' = 2r
1
'/t ; z
2
' = 2r
2
'/t
Do đó : z
1
' =z
1
/cos
1
, z
2
' =z
2
/cos
2
Hai bánh răng có các vòng chia r
1
', r
2
' và số răng z
1
', z
2
' gọi là bánh răng thay
thế, rất có ý nghĩa trong việc tính toán hình học và sức bền của răng.
2. Tính số răng tối thiểu của bánh răng nón.
Đẻ tránh hiện t-ợng cắt chân răng , số răng của bánh răng nón không đ-ợc ít
hơn một trị số tối thiểu. Vì sự ăn khớp của bánh răng nón t-ơng đ-ơng nh-
sự ăn khớp của bánh răng thay thế nên khi ở bánh răng thay thế không xảy ra
hiện t-ợng cắt chân răng thì ở bánh răng nón cũng vậy. Điều kiện không cắt
chân răng của bánh răng thay thế là: z'
1,2
17 hay
z
1,2
/cos
1,2
17
Từ đó suy ra điều kiện không cắt chân răng của bánh răng nón là:
z
min 1,2
= 17 cos
1,2
Đây cũng là số răng tối thiểu của bánh răng nón. Vì cos
1,2
< 1 cho nên so
với bánh răng tròn răng thẳng số răng của bánh răng nón có thể ít hơn nhiều.
3. Các thông số chế tạo cơ bản
Câu 28: Hãy phân biệt hệ bánh răng th-ờng và hệ bánh răng vi sai?Nêu một ví
dụ về ứng dụng của hệ bánh răng vi sai?
+)Hệ bánh răng th-ờng là hệ bánh răng trong đó các bánh răng đều có đ-ờng trục
cố định trong một hệ quy chiếu gắn liền với giá.Các hệ bánh răng th-ờng đều có
một bậc tự do.Tỉ số truyền các cặp bánh răng phụ thuộc số răng của từng bánh răng
còn tỉ số truyền của hệ th-ờng bằng tích các tỉ số truyền các cặp bánh răng trong
hệ:
i
1N
= I
12
.I
23
.I
34
I
(N-1)N
+)Hệ bánh răng vi sai là hệ bánh răng mà mỗi cặp bánh răng có ít nhất một bánh răng có
đ-ờng trục di động đối với giá.Các bánh răng có đ-ờng trục cố định gọi là các bánh răng
trung tâm,các bánh răng có đ-ờng trục di động gọi là các bánh răng vệ tinh còn khâu
độngmang trục của bánh răng vệ tinh (hay các bánh răng vệ tinh ) gọi là cần.Trong hệ
bánh răng vi sai đ-ờng trục của bánh răng trung tâm (hay của các bánh răng trung tâm )
và đ-ờng trục của cần C phải nằm trên cùng một đ-ờng thẳng ,điều này đ-ợc gọi là điều
kiện đồng trục trong hệ bánh răng vi sai.Các hệ bánh răng vi sai đều có 2 bậc tự do.
+)Ví dụ về ứng dụng của bánh răng vi sai:nh- ta biết thì công dụng của hệ bánh
răng vi sai là:- Dùng chế tạo hộp số vi sai dùng trong ô tô
- Dùng làm cơ cấu hợp chuyển động trong các hệ thống tự động
Xét hộp vi sai của ô tô:Hộp có 2 cặp bánh răng hình nón (3 ,4),(4 ,3).Số răng các
bánh trung 3,3 bằng nhau :z
3
= z
3
.Trục bánh vệ tinh 4 vuông góc với trục của các
bánh trung tâm và cần C.Chuyển động từ động cơ đ-ợc truyền tới cần C thông qua
cặp bánh răng hình nón (1 ,2) (hình.13)
Gọi vân tốc của cần C và của bánh răng trung tâm 3 ,3 lần l-ợt là :
C
,
3
,
3
thì
:
i
33
C
= (
3
-
c
)/(
3
-
C
) = -Z
4
Z
3
/Z
3
Z
4
= -Z
3
/Z
3
= -1
do đó :
3
-
C
= -(
3
-
C
)
3
+
3
= 2
C
(20)