Nghiên cứu xây dựng chương trình tính toán vị trí tàu theo phương pháp ma trận vòng đẳng cao thiên thể pptx
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (1.56 MB, 83 trang )
Luận văn
Nghiên cứu xây dựng chương
trình tính toán vị trí tàu theo
phương pháp ma trận vòng
đẳng cao thiên thể
i
LỜI CAM ĐOAN
Tôi xin cam đoan rằng luận văn này là công trình nghiên cứu của riêng
tôi. Các số liệu, kết quả được nêu ra trong bản luận văn này là hoàn toàn trung
thực và chưa từng được ai công bố trong bất kỳ một công trình nghiên cứu
nào khác trước đó.
Đồng thời, tôi cũng xin cam đoan rằng, các thông tin được trích dẫn
trong luận văn đều đã được chỉ rõ về xuất xứ, nguồn gốc và đảm bảo tính
chính xác.
Hải Phòng, ngày 31 tháng 10 năm 2012
Tác giả
KS. NGUYỄN VĂN SƯỚNG
ii
LỜI CẢM ƠN
Tác giả xin chân thành cám ơn các thành viên trong gia đình đã động
viên và tạo mọi điều kiện thuận lợi nhất để tác giả có thể hoàn thành chương
trình học tập của mình.
Tác giả xin chân thành cám ơn Thầy giáo PGS, TS. Nguyễn Cảnh Sơn,
thầy đã hướng dẫn, chỉ bảo tận tình chu đáo trong suốt thời gian tác giả thực
hiện đề tài cũng như theo học tại Trường Đại học Hàng hải Việt Nam.
Tác giả cũng xin trân trọng cám ơn các Thầy giáo PGS, TS. Lê Đức
Toàn, ThS. Đào Quang Dân, các thầy đã giúp đỡ tác giả đăng tải một số công
trình khoa học liên quan cũng như là góp ý để nội dung của đề tài được phong
phú hơn, hoàn thiện hơn.
Mặc dù tác giả đã rất cố gắng trong quá trình nghiên cứu cũng như viết
luận văn, nhưng với nội dung khá lớn, việc thu thập và xử lý tài liệu nhiều và
bản thân còn những hạn chế nhất định, vì vậy, khó tránh khỏi những khiếm
khuyết. Tác giả rất mong nhận được sự đóng góp ý kiến xây dựng của các
thầy, các đồng nghiệp và các nhà khoa học quan tâm, để công trình nghiên
cứu ngày càng được hoàn chỉnh hơn.
Tác giả xin trân trọng cảm ơn!
iii
MỤC LỤC
LỜI CAM ĐOAN i
LỜI CẢM ƠN ii
MỤC LỤC………………………………………………………………… iii
DANH MỤC CÁC CHỮ VIẾT TẮT VÀ KÝ HIỆU v
DANH MỤC HÌNH VẼ … vii
DANH MỤC CÁC BẢNG ix
MỞ ĐẦU 1
1. Tính cấp thiết của đề tài………………… 1
2. Mục đích nghiên cứu của đề tài 2
3. Đối tượng và phạm vi nghiên cứu 3
4. Phương pháp nghiên cứu của đề tài 3
5. Ý nghĩa khoa học và thực tiễn của đề tài 3
CHƯƠNG 1. TỔNG QUAN CÁC PHƯƠNG PHÁP XÁC ĐỊNH VỊ TRÍ
TÀU BẰNG THIÊN VĂN VÀ HẠN CHẾ CỦA CÁC PHƯƠNG
PHÁP 5
1.1 Cơ sở lý thuyết xác định vị trí tàu bằng phương pháp thiên văn……… 5
1.2 Các phương pháp xác định vị trí tàu bằng thiên văn từ trước đến nay….8
1.3 Độ chính xác của các phương pháp xác định vị trí tàu bằng quan sát
thiên văn từ trước đến nay…………………………………………… 19
1.4 Xu hướng phát triển hàng hải thiên văn trong tương lai………………21
1.5 Kết luận chương 1…………………………………………………… 24
CHƯƠNG 2. CƠ SỞ DỮ LIỆU VÀ NGÔN NGỮ LẬP TRÌNH SỬ
DỤNG ĐỂ XÂY DỰNG CHƯƠNG TRÌNH TÍNH TOÁN VỊ TRÍ
TÀU………………………………………………………………………….25
iv
2.1 Các yếu tố cần thiết để giải bài toán xác định vị trí tàu bằng phương
pháp thiên văn, cơ sở dữ liệu cho chương trình tính toán…………… 25
2.2 Ngôn ngữ lập trình sử dụng để xây dựng chương trình……………….33
2.3 Kết luận chương 2…………………………………………………… 43
CHƯƠNG 3. THIẾT LẬP PHƯƠNG PHÁP MA TRẬN VÒNG ĐẲNG
CAO THIÊN THỂ VÀ XÂY DỰNG CHƯƠNG TRÌNH TÍNH TOÁN VỊ
TRÍ TÀU THEO PHƯƠNG PHÁP……………………………………….44
3.1 Thiết lập phương pháp ma trận vòng đẳng cao thiên thể tính toán vị trí
người quan sát…………………………………………………………44
3.2 Xây dựng chương trình tính toán vị trí tàu theo phương pháp ma trận
vòng đẳng cao thiên thể……………………………………………… 50
3.3 Độ chính xác vị trí tính toán theo phương pháp và độ tin cậy của chương
trình tính toán………………………………………………………….56
3.4 Kết luận chương 3………………….………………………………….62
KẾT LUẬN, KIẾN NGHỊ……………………………………………… 62
DANH MỤC CÁC CÔNG TRÌNH KHOA HỌC ĐÃ CÔNG BỐ LIÊN
QUAN ĐẾN ĐỀ TÀI CỦA TÁC GIẢ…………………………………….65
DANH MỤC TÀI LIỆU THAM KHẢO………………………………….66
PHỤ LỤC……………………………………………………………….1/PL1
Phụ lục 1………………………………………………………………1/PL1
Phụ lục 2………………………………………………………………2/PL2
v
DANH MỤC CÁC CHỮ VIẾT TẮT VÀ KÝ HIỆU
Chữ viết tắt
Giải thích
Dec
Declination of celestial body – Xích vĩ của thiên thể
GHA
Greenwich Hour Angle of celestial body - Góc giờ thế giới
của thiên thể
Dec
*
, δ
*
Declination of celestial body – Xích vĩ của ngôi sao
SHA
*
Sidereal Hour Angle – xích kinh nghịch của ngôi sao
GHA
γ
, t
γ
G
Greenwich Hour Angle of Aries – Góc giờ thế giới của điểm
xuân phân
GHA
*
, t
*
G
Greenwich Hour Angle of star – Góc giờ thế giới của ngôi
sao
LHA
*
, t
*
L
Local Hour Angle of star – Góc giờ thế giới của ngôi sao
Dec
Declination of Sun – Xích vĩ của mặt trời
GHA
Greenwich Hour Angle of Sun – Góc giờ thế giới của mặt
trời
∆Dec
Lượng biến thiên xích vĩ thiên thể
∆SHA
Lượng biến thiên xích kinh nghịch của thiên thể
Dip
Số hiệu chỉnh độ cao do độ nghiêng chân trời
R
Refraction – Số hiệu chỉnh độ cao theo nhiệt độ và khí áp
PA
Parallax in altitude – Số hiệu chỉnh độ cao do thị sai
HP
Horizontal parallax – Thị sai chân trời
SD
Semi Diameter – Bán kính thiên thể
vi
SA
Semi Diameter of altitude – Số hiệu chỉnh độ cao do thiên
thể có bán kính lớn
φ
Vĩ độ người quan sát trong hệ tọa độ địa dư
λ
Kinh độ người quan sát trong tọa độ địa dư
P
M
Vị trí thiên đỉnh trên thiên cầu
X
o
Hoành độ thiên đỉnh trong hệ tọa độ vuông góc
Y
o
Tung độ thiên đỉnh trong hệ tọa độ vuông góc
Z
o
Cao độ thiên đỉnh trong hệ tọa độ vuông góc
X
E
Hoành độ thiên đỉnh dự đoán trong hệ tọa độ vuông góc
Y
E
Tung độ thiên đỉnh dự đoán trong hệ tọa độ vuông góc
Z
E
Cao độ thiên đỉnh dự đoán trong hệ tọa độ vuông góc
h
S
Độ cao thực tế của thiên thể sau khi hiệu chỉnh
x
1
, x
2
, x
3 Hoành độ các thiên thể 1, 2, 3 trong hệ tọa độ vuông góc
y
1
, y
2
, y
3
Tung độ các thiên thể 1, 2, 3 trong hệ tọa độ vuông góc
z
1
, z
2
, z
3
Cao độ các thiên thể 1, 2, 3 trong hệ tọa độ vuông góc
P
K
, P
K+1 Vị trí tính toán tại vòng lặp thứ K, thứ K + 1
M
OC.OP
Tích vô hướng của 2 vector
r
Vector chỉ phương
1 2
OC OC
Tích có hướng của 2 vector
1 2
OC OC
Độ dài vector tích có hướng của 2 vector
vii
DANH MỤC HÌNH VẼ
Số hình
Tên hình Trang
1.1 Vị trí người quan sát trên thiên cầu 5
1.2 Đồ giải 2 vòng đẳng cao xác định vị trí trên thiên cầu 8
1.3 Tam giác thiên văn 9
1.4 Đường vị trí xác định theo phương pháp Sumner 12
1.5 Đường vị trí xác định theo phương pháp Akimov 13
1.6 Đường vị trí xác định theo phương pháp hiệu độ cao 14
1.7 Robot thăm dò 22
1.8 Thiết bị nhận dạng sao (Star tracker) 23
2.1 Cửa sổ làm việc của chương trình 34
3.1 Hệ tọa độ không gian đề các vuông góc 44
3.2 Thiên cầu trên hệ tọa độ vuông góc 45
3.3 Mô tả phương pháp giải bằng hình học 47
3.4
Sơ đồ thuật toán chương trình xác định vị trí tàu bằng
mặt trời
51
3.5
Sơ đồ thuật toán chương trình xác định vị trí tàu bằng 2
thiên thể
52
viii
3.6
Sơ đồ thuật toán chương trình xác định vị trí tàu bằng 3
thiên thể
53
3.7 Cửa sổ chương trình chính 54
3.8 Cửa sổ chương trình tính toán vị trí tàu bằng mặt trời 54
3.9 Cửa sổ chương trình tính toán vị trí tàu bằng bằng 2 sao 55
3.10 Cửa sổ chương trình tính toán vị trí tàu bằng bằng 3 sao 55
3.11
Kết quả tính toán vị trí tàu bằng mặt trời không đồng
thời
56
3.12
Phương pháp hiệu độ cao xác định vị trí tàu bằng mặt
trời không đồng thời
57
3.13
Kết quả tính toán vị trí tàu bằng phương pháp ma trận
vòng đẳng cao với 2 sao
58
3.14 Phương pháp hiệu độ cao xác định vị trí tàu bằng 2 sao 59
3.15
Kết quả tính toán vị trí tàu bằng phương pháp ma trận
vòng đẳng cao với 3 sao
60
3.16 Phương pháp hiệu độ cao xác định vị trí tàu bằng 3 sao 61
ix
DANH MỤC CÁC BẢNG
Số bảng Tên bảng Trang
1.1 Tọa độ và biến thiên theo thời gian của các ngôi sao 29
1
MỞ ĐẦU
1. Tính cấp thiết của đề tài
Ngày nay, hệ thống định vị vệ tinh toàn cầu GPS là một phần không thể
thiếu trên các tàu thuyền vượt Đại dương. Hệ thống này được chính phủ Mỹ
xây dựng và quản lý, điều đó đồng nghĩa với việc độ chính xác vị trí tính toán
của các máy thu dân sự bị hạn chế ở một mức độ nhất định. Mặt khác, tại một
số vùng biển trên thế giới, máy thu GPS không nhận được tín hiệu sóng từ các
vệ tinh. Do đó, việc nghiên cứu và phát triển các hệ thống định vị khác nhau
nhằm hỗ trợ, bổ sung cũng như thay thế hệ thống GPS khi không có tín hiệu
sóng hoặc khi chính phủ Mỹ ngừng phát tín hiệu từ các vệ tinh đã và đang
được các nước trên thế giới tiến hành một cách mạnh mẽ.
Trên quan điểm đó, nhiều hệ thống định vị khác như GLONASS của
Nga, GALILEO của Liên minh Châu Âu, IRNSS của Ấn Độ đã và đang được
xây dựng, hoàn thiện, thử nghiệm kiểm tra độ chính xác. Đó cũng là những
bước tiến quan trọng nhằm hiện thực hóa giấc mơ làm chủ công nghệ dẫn
đường bằng vệ tinh của các quốc gia tiên tiến này. Tuy nhiên, các hệ thống
trên vẫn chưa thể đáp ứng những yêu cầu về một hệ thống định vị hoàn hảo
đối với lĩnh vực dân sự.
Hàng hải thiên văn là phương pháp tính toán vị trí tàu của người đi
biển, vị trí được xác định bằng cách quan sát thiên thể trên bầu trời. Đồng
thời, đây cũng là môn học bắt buộc đối với học viên chuyên ngành hàng hải
của các Trường Đại học Hàng hải trên Thế giới như: Học viện Hàng hải
California, Đại học Hàng hải Đại Liên, Đại học Hàng hải Thượng hải, Đại
học Đại Dương, Đại học Hàng hải Việt Nam……vv. Việc đưa hàng hải thiên
văn vào đào tạo, huấn luyện đã được tiêu chuẩn hóa trong công ước STCW -
2
78/95, sửa đổi Manila - 2010. Kể từ khi nhà hàng hải Saint - Hilaire đề xuất
phương pháp hiệu đường cao vị trí đến nay, đã có nhiều phương pháp thiên
văn tính toán vị trí tàu cũng như những chương trình phần mềm ứng dụng
được xây dựng (Ogilvie, R. E (1977), Watkins, R. (1979), Van Allen, J. A
(1981), Sevarance, R.W (1990), Metcalf, T. R (1991), Kaplan, G. H. (1995),
Andrés Ruiz González (2008)) để hỗ trợ các nhà hàng hải xác định vị trí khi
tàu hành trình ngoài Đại dương.
Mặc dù với số lượng lớn các phương pháp và chương trình phần mềm
tính toán vị trí, nhưng đa số, các phương pháp đều được cải tiến từ phương
pháp hiệu đường cao vị trí, ứng dụng toán học vào đó để tìm nghiệm tối ưu,
một số phương pháp khác giải trực tiếp phương trình vòng đẳng cao bằng
biến đổi lượng giác. Do vậy, các phương pháp này đều mắc sai số phương
pháp do thay thế vòng đẳng cao bằng đường vị trí hoặc mắc những sai số do
không hiệu chỉnh ảnh hưởng của các nguyên nhân gây sai số.
Từ những phân tích trên, có thể thấy nhu cầu về một phương pháp mới
khắc phục những nhược điểm của hàng hải thiên văn cũng như chương trình
phần mềm tính toán vị trí tàu dựa trên phương pháp mới là hết sức cần thiết
đối với ngành hàng hải hiện đại. Do đó, tác giải thực hiện đề tài: “Nghiên
cứu xây dựng chương trình tính toán vị trí tàu theo phương pháp ma
trận vòng đẳng cao thiên thể” nhằm đáp ứng những yêu cầu cấp thiết để đưa
hàng hải thiên văn chính xác hơn, hiện đại hơn cả về lý thuyết lẫn thực tế.
2. Mục đích nghiên cứu của đề tài
Từ những nhược điểm của các phương pháp hàng hải thiên văn đang
được sử dụng hiện nay và xu hướng phát triển trong tương lai của phương
pháp này. Đề tài thiết lập phương pháp ma trận giải hệ phương trình vòng
đẳng cao thiên thể thay vì phương pháp hiệu đường cao vị trí của nhà hàng
hải Saint - Hilaire.
3
Ngoài ra, chương trình tính toán vị trí tàu theo phương pháp mới cũng
được xây dựng để kiểm tra độ chính xác cũng như ứng dụng thực tế trong xác
định vị trí tàu bằng thiên văn.
3. Đối tượng và phạm vi nghiên cứu
Phương trình vòng đẳng cao, vị trí tàu trong hệ tọa độ không gian đề
các vuông góc, phân tích ảnh hưởng của các yếu tố gây sai số và đưa ra
phương pháp hiệu chỉnh nhằm nâng cao độ chính xác vị trí tính toán.
Nội dung đề tài giới hạn trong phạm vi bài toán tối ưu hóa xác định vị
trí tàu bằng các thiên thể, chương trình tính toán được xây dựng với cơ sở dữ
liệu cho bài toán mặt trời không đồng thời, bài toán 2 sao, 3 sao.
4. Phương pháp nghiên cứu đề tài
Để thực hiện việc nghiên cứu đề tài, tác giả kết hợp nhiều phương pháp
nghiên cứu khoa học khác nhau như: phương pháp phân tích toán học thiết lập
vòng đẳng cao thiên thể, phương pháp chuyên gia giải bài toán vòng lặp tối
ưu, phương pháp thu thập dữ liệu tính toán tọa độ của các thiên thể.
Hơn nữa, phương pháp tư vấn từ các chuyên gia cũng được sử dụng để
nâng cao độ chính xác của vị trí tính toán.
5. Ý nghĩa khoa học và thực tiễn của đề tài
Phương pháp ma trận giải hệ phương trình vòng đẳng cao tính toán vị
trí tàu được thiết lập, đây là bước phát triển quan trọng trong nghiên cứu hoàn
thiện lý thuyết hàng hải thiên văn hiện đại, từ đó làm cơ sở nền tảng định
hướng cho những nghiên cứu sâu rộng hơn trong tương lai, kết hợp phương
pháp hàng hải thiên văn với các phương pháp hàng hải hiện đại khác, nhằm
nâng cao độ chính xác, độ tin cậy của vị trí tàu xác định.
Với kết quả thu được của đề tài, phương pháp ma trận vòng đẳng cao
thiên thể tính toán vị trí tàu có thể làm tài liệu học tập, tham khảo cho môn
4
hàng hải thiên văn trong đào tạo sinh viên chuyên ngành hàng hải, học viên
các lớp huấn luyện sỹ quan boong.
Chương trình tính toán vị trí tàu theo phương pháp được thiết kế bằng
ngôn ngữ lập trình Visual Basic có thể hỗ trợ các sỹ quan hàng hải trong xác
định vị trí tàu khi hệ thống GPS bị hạn chế hoặc khi kiểm tra độ tin cậy của
các hệ thống hàng hải hiện đại khác.
5
CHƯƠNG 1. TỔNG QUAN CÁC PHƯƠNG PHÁP XÁC ĐỊNH VỊ TRÍ
TÀU BẰNG THIÊN VĂN VÀ HẠN CHẾ CỦA CÁC PHƯƠNG PHÁP
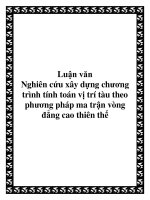
1.1 Cơ sở lý thuyết xác định vị trí tàu bằng phương pháp thiên văn
Để xác định vị trí tàu bằng phương pháp thiên văn thì mối liên hệ giữa
vị trí người quan sát và thiên thể trên thiên cầu phải được thiết lập (hình 1.1),
từ đó xây dựng các hệ công thức liên hệ vị trí tàu với tọa độ thiên thể tại thời
điểm quan sát. Giả sử vị trí người quan sát trên địa cầu là M(φ, λ), đài thiên
văn Greenwich là G.
Xây dựng thiên cầu có tâm trùng với tâm địa cầu, bán kính bất kỳ,
Chiếu M lên thiên cầu nhận được thiên đỉnh Z
M
và thiên kinh tuyến thượng
P
N
Z
M
P
S
, tương tự với thiên kinh tuyến thượng P
N
Z
G
P
S
của đài thiên văn
Greenwich. Thiên kinh tuyến P
N
CP
S
chứa thiên thể C.
1.1.1 Mối liên hệ giữa vị trí người quan sát và thiên đỉnh trên thiên cầu
Theo hình vẽ nhận thấy:
o o
EE ee
và
M
Z E Me
, thay vị trí địa lý và
tọa độ xích đạo của thiên đỉnh người quan sát vào các hệ thức trên thu được:
* *
M
ZM
L
M G
t t
M
ZM
L
M G
t t
(1.1)
hoặc
Vị trí người quan
sát trên địa cầu
Hình 1.1. Vị trí người quan sát trên thiên cầu
Thiên c
ầu
Địa cầu
E
C
E
E
o
C
Z
G
e
e
o
G
M
Z
M
P
N
P
S
δ
ZM
*
L
t
*
G
t
Thiên đỉnh
người quan sát
6
Hệ thức (1.1) liên hệ vị trí người quan sát và hình chiếu của nó trên
thiên cầu. Do trái đất quay theo chiều từ W sang E nên thiên đỉnh Z
M
sẽ vạch
trên thiên cầu một quỹ đạo hình tròn theo chiều ngược lại - trường hợp vĩ độ
người quan sát φ
M
không đổi, nếu φ
M
thay đổi thì quỹ đạo chuyển động của
Z
M
sẽ phức tạp hơn nhiều.
Vậy khi xác định vị trí thiên đỉnh, thời điểm quan sát thiên thể phải
được ghi lại làm cơ sở xác định góc giời thế giới của điểm xuân phân hoặc
góc giờ thế giới của thiên thể. Hơn nữa, nếu xác định được vị trí thiên đỉnh
kết hợp với hệ thức liên hệ sẽ xác định được tọa độ địa dư của người quan sát
trên địa cầu tại thời điểm quan sát thiên thể.
1.1.2 Cơ sở lý thuyết xác định vị trí thiên đỉnh trên thiên cầu
Xác định vị trí tàu là xác định 2 thông số vĩ độ φ và kinh độ λ như vậy
cần ít nhất 2 phương trình chứa 2 tham số này: U
1
= f(φ, λ) và U
2
= g(φ, λ). Để
có được hệ phương trình, phải thiết lập mối liên hệ giữa thiên đỉnh người
quan sát và thiên thể trên thiên cầu, ngoài ra các thiên thể phải được quan sát
một cách đồng thời hoặc nhiều lần khác nhau đối với một thiên thể.
Mối liên hệ giữa thiên đỉnh người quan sát và thiên thể có thể được xây
dựng dựa trên các tam giác thiên văn, xét 2 tam giác thiên văn Z
M
P
N
C
1
và
Z
M
P
N
C
2
áp dụng công thức hàm số cosin với các cạnh:
sin = sin .sin + cos .cos .cos( )
sin = sin .sin + cos .cos .cos( )
1
2
E
1 1 1 G W
E
2 2 2 G W
h
φ δ φ δ t ± λ
h
φ δ φ δ t ± λ
Với hệ (1.2), sử dụng phương pháp biến đổi trực tiếp nếu số thiên thể
quan sát là 2, nếu số thiên thể quan sát nhiều hơn 2 có thể áp dụng phương
pháp bình phương nhỏ nhất để tìm nghiệm tối ưu, trường hợp chỉ có 1 thiên
thể được quan sát thì chỉ xác định được 1 trong 2 tham số vị trí dựa vào tham
số còn lại đã biết.
(1.2)
7
1.1.2.1 Phương pháp giải tích
Phương pháp giải tích thuần túy: sử dụng thay thế ẩn số hoặc đặt
phương trình trung gian, tiến hành khử 1 trong 2 ẩn số của hệ phương trình từ
đó rút ra 1 nghiệm và thế vào tìm nghiệm còn lại.
Phương pháp giải tích gần đúng: sử dụng công thức chuỗi Taylo phân
tích hàm số phức tạp trên về dạng vô hạn phần tử sau đó lấy đến số hạng bất
kỳ tùy thuộc vào độ chính xác yêu cầu.
Tuy nhiên, hệ phương trình trên bao gồm các siêu phương trình phức
tạp việc giải chúng vô cùng khó khăn, do đó trong Hàng hải thiên văn chỉ áp
dụng phương pháp giải tích trong những trường hợp đặc biệt như:
Xác định riêng vĩ độ : Nếu thiên thể qua thiên kinh tuyến thượng người
quan sát thì h = H, t
L
= 0 phương trình liên hệ có dạng :
sinH = cos(90
0
-H) = cos(φ – δ)
=> φ = 90
0
- H + δ (1.3)
Tại thời điểm thiên thể đi qua thiên kinh tuyến thượng, đo độ cao thiên
thể đồng thời ghi lại giờ thời kế T
TK
tính toán xích vĩ δ của thiên thể sau đó
thay vào công thức (1.3) xác định φ
Xác định riêng kinh độ: Tại thời điểm đo độ cao thiên thể ghi lại giờ
thời kế T
TK
tính toán giá trị tọa độ của thiên thể δ, t
G
thay vào phương trình
(1.4)
sinh = sinφ.sinδ + cosφ.cosδ.cos(t
G
± λ)
=> cos(t
G
± λ) = (sinh - sinφ.sinδ)/cosφ.cosδ (1.4)
=> λ = arcos[(sinh - sinφ.sinδ)/cosφ.cosδ] - t
G
(nếu λE)
= t
G
- arcos[(sinh - sinφ.sinδ)/cosφ.cosδ] (nếu λW)
1.1.2.2 Phương pháp đồ giải
8
Quan sát độ cao 2 thiên thể C
1
, C
2
được h
1
, h
2
, các đỉnh cự Z
1
= 90
0
– h
1
và Z
2
= 90
0
– h
2
. Trên thiên cầu, từ 2 vị trí C
1
, C
2
dựng 2 cung tròn có tâm tại
vị trí 2 thiên thể và bán kính là Z
1
, Z
2
giao điểm của hai cung tròn cho vị trí
thiên đỉnh người quan sát (hình 1.2).
Theo lý thuyết toán học, các cung tròn này chính là quỹ tích chứa thiên
đỉnh người quan sát cùng nhìn thấy thiên thể độ cao h tại thời điểm quan sát,
do đó các cung tròn này chính là các đường đẳng trị của những thiên đỉnh
người quan sát còn φ và λ là những giá trị thay đổi.
Tuy nhiên, do độ cong của quả cầu rất lớn dẫn đến khoảng cách trên hải
đồ và trên quả cầu là sai lệch nhau nhiều, vị trí xác định có độ chính xác thấp,
phương pháp thực hiện kém tin cậy.
1.2 Các phương pháp xác định vị trí tàu bằng thiên văn từ trước đến nay
Để xác định vị trí tàu, phải có ít nhất 2 đường quỹ tích chứa vị trí, trước
khi nghiên cứu các phương pháp xác định vị trí tàu bằng thiên văn, những
khái niệm về đường quỹ tích chứa vị trí tàu được đưa ra
1.2.1 Khái niệm vòng đẳng cao thiên thể, cực chiếu sáng đường cao vị trí và
phương trình mô tả vòng đẳng cao, đường cao vị trí
Hình 1.2. Đồ giải 2 vòng đẳng cao xác định vị trí trên thiên cầu
.
C
2
C
1
Z
M
P
N
P
S
Cung tròn chứa vị trí
.
Vị trí tàu
Thiên c
ầu
Thiên th
ể
9
1.2.1.1 Vòng đẳng cao thiên thể
Tại thời điểm nhất định, người quan sát ở vị trí M trên trái đất, đo độ
cao h của thiên thể C, đỉnh cự Z = 90
0
- h. Do thiên thể C ở xa vô cùng nên
các tia sáng từ C đến trái đất sẽ song song với nhau, vậy góc Z hợp bởi đường
thẳng đứng qua vị trí người quan sát trên bề mặt trái đất và tia tới từ thiên thể
C cũng sẽ bằng góc Z ở tâm thiên cầu.
Dựng một mặt nón quanh trục OC với đường sinh là đường thẳng đứng
qua vị trí người quan sát, mặt nón này sẽ cắt bề mặt trái đất theo một đường
tròn, đường tròn đó được gọi là vòng đẳng cao. Vậy, vòng đẳng cao là quỹ
tích của những điểm trên bề mặt trái đất hoặc thiên cầu, theo đó vào thời điểm
quan sát sẽ thấy thiên thể trên cùng một độ cao. Phương trình vòng đẳng cao
thiên thể được xây dựng trên công thức cos cạnh (90
0
– h) của tam giác thiên
văn P
N
Z
M
C (hình 1.3):
cos(90
0
– h) = cos(90
0
–
).cos(90
0
–
) + sin(90
0
–
).sin(90
0
–
). cost
L
=> sinh = sin
.sin
+ cos
.cos
.cost
L
(1.5)
1.2.1.2 Cực chiếu sáng thiên thể
Cực chiếu sáng a là hình chiếu của thiên thể xuống địa cầu hoặc xuống
hải đồ. Trên thiên cầu toạ độ thiên thể là C(
, t
G
) hình chiếu của nó lên hải đồ
t
L
C
Z
M
90
0
-
90
0
-h
A
90
0
-
P
N
Hình 1.3. Tam giác thiên văn
10
được xác định bằng toạ độ địa dư (
a
,
a
), do đó
a
=
và
a
= t
G
. Như vậy toạ
độ của cực chiếu sáng và bán kính Z = 90
0
- h là những thông số để xác định
vòng đẳng cao trên địa cầu. Tuy nhiên, trong thực tế trái đất không phải là hình
cầu mà là một hình phức tạp nên hình chiếu vòng đẳng cao trên trái đất không
phải đường tròn mà là một đường cong phức tạp.
1.2.1.3 Đường cao vị trí
Việc đồ giải vòng đẳng cao thiên thể trên hải đồ rất phức tạp đặc biệt
với những vòng đẳng cao có độ biến dạng lớn. Qua nghiên cứu sự biến dạng
của hình chiếu vòng đẳng cao trên hải đồ Mercator người ta thấy một phần
nhỏ hình chiếu vòng đẳng cao có dạng gần giống đoạn đường thẳng nghĩa là
với khoảng cách ngắn trên thực địa hay hải đồ có thể dùng một đoạn đường
thẳng tiếp xúc với đoạn đường cong của vòng đẳng cao để thay thế cho vòng
đẳng cao. Trong hàng hải, người ta chọn đoạn thẳng tiếp tuyến với đường
cong gần vị trí dự đoán M
C
để thay thế. Vậy, đường vị trí là một đoạn thẳng
thay thế cho một đoạn đường cong của vòng đẳng cao, tiếp xúc với đoạn
đường cong đó tại điểm gần với vị trí dự đoán của tàu. Phương trình đường
cao vị trí thiết lập từ phương trình của vòng đẳng cao:
sinh = sin
.sin
+ cos
.cos
.cost
L
=> h = arcsin(sin
.sin
+ cos
.cos
.cost
L
) (1.6)
Trong đó h là độ cao thiên thể, nếu đo tại vị trí thực tế M
o
(
o
,
o
) sẽ thu
được độ cao thật h
S
, tại thời điểm quan sát cũng xác định độ cao thiên thể tại
vị trí dự đoán M
c
(
c
,
c
) là h
C
. Thực tế vị trí dự đoán M
C
và vị trí thực tế M
o
không trùng nhau nên độ cao thực h
S
sẽ khác độ cao tính toán h
C
, tuy nhiên sự
sai khác này không lớn và được ký hiệu là h. Để thiết lập phương trình
đường vị trí, phân tích thành chuỗi với hàm độ cao thiên thể (1.5) hoặc công
thức vi phân với hàm số.
11
. .
C
C
h h
dh d d
=>
. .
C
C
h h
h
(1.7)
Phương trình (1.7) là đường thẳng tiếp xúc với đoạn đường cong của
vòng đẳng cao gần vị trí dự đoán M
C
Tính
C
h
: vi phân phương trình vòng đẳng cao theo h và
cosh.h = cos
.sin
.
- sin
.cos
.cost
L
.
(1.8)
=>
(cos .sin sin .cos .cos )
cosh
L
C
t
h
(1.9)
Mặt khác, từ tam giác thiên văn áp dụng công thức 5 yếu tố liên tiếp
sin(90
0
- h).cosA = sin(90
0
-
).cos(90
0
-
) - cos(90
0
-
).sin(90
0
-
).cost
L
=> cosA.cosh = cos
.sin
- sin
.cos
.cost
L
=>
(cos .sin sin .cos .cos )
cos
cosh
L
t
A
=>
C
h
= cosA
c
(1.10)
Tính
C
h
: vi phân phương trình vòng đẳng cao theo h và t
L
cosh.h = - cos
.cos
.sint
L
.t
L
cos .cos .sin
cosh
L
L
t
h
t
(1.11)
Hơn nữa, theo hệ thức sin trong tam giác thiên văn
sinA/cos
=sint
L
/cosh
=> h/t
L
= - cos
.sinA =>
os .sin
C
C
h
c A
(1.12)
12
Vậy phương trình đường cao vị trí có dạng :
h = cosA
c
.
+ sinA
c
.cos
c
.
(1.13)
1.2.2 Các phương pháp xác định vị trí tàu bằng thiên văn từ trước đến nay
1.2.2.1. Phương pháp Sumner
Phương pháp kinh độ do nhà hàng hải người Mỹ, Thomas H Sumner đề
xuất năm 1837, bản chất là quan sát độ cao thiên thể h
S
, đồng thời tính toán
tọa độ
, t
G
của thiên thể, lấy vị trí dự đoán M
C
(
c
,
c
), chọn Δφ = 10’ – 20’.
Sau đó tính toán tọa độ các điểm thuộc vòng đẳng cao (hình 1.4) theo công
thức
1
=
c
+ Δφ,
2
=
c
– Δφ, thay các giá trị h
S
,
1
,
2
vào phương trình
(1.14) xác định các giá trị kinh độ
1
,
2
.
sinh = sin
.sin
+ cos
.cos
.cost
L
(1.14)
Trên hải đồ, nối 2 điểm M
1
(
1
,
1
), M
1
(
2
,
2
) nhận được đường vị trí
[1, 5]. Để xác định vị trí tàu M
o
phải quan sát thiên thể thứ hai, các bước tiến
hành tương tự, giao điểm của hai đường vị trí sẽ cho vị trí tàu. Phương pháp
này được áp dụng với những thiên thể ở gần vòng thẳng đứng gốc tức là (45
0
A
BV
135
0
). Khi thiên thể nằm ngoài giới hạn này thì kết quả sẽ kém chính
xác.
1.2.2.2. Phương pháp Paludal
Hình 1.4. Đường vị trí xác định theo phương pháp Sumner
M
2
(
2
,
2
)
M
1
(
1
,
1
)
O
λ
13
Để khắc phục nhược điểm của phương pháp kinh độ khi thiên thể nằm
ở gần kinh tuyến, nhà hàng hải Paludal đã đề xướng phương pháp vĩ độ. Về
mặt nguyên lý phương pháp này giống như phương pháp kinh độ, tuy nhiên,
thay vì tính
1
và
2
phương pháp đi xác định
1
,
2
dựa vào
1
,
2
và phưong
trình vòng đẳng cao. Sau khi có 2 điểm M
1
(
1
,
1
) và M
2
(
2
,
2
) nối chúng lại
được đường cao vị trí. Tương tự, quan sát thiên thể thứ 2 cho đường vị trí thứ
2, giao điểm của 2 đường vị trí cho vị trí tàu tại thời điểm quan sát [5].
1.2.2.3. Phương pháp Akimov
Với mục đích hoàn thiện hơn cách vẽ đường cao vị trí, năm 1849 nhà
hàng hải Akimov đề xuất phương pháp phương vị. Thay vì tính toán 2 điểm
trên vòng đẳng cao như 2 phương pháp trên, Akimov xác định một điểm trên
vòng đẳng cao và góc hướng tới cực chiếu sáng.
Do vòng thẳng đứng chứa thiên thể vuông góc với đường chân trời thật,
vậy hình chiếu của vòng thẳng đứng chứa thiên thể xuống mặt phẳng chân
trời aM
C
sẽ vuông góc với vòng đẳng cao. Nếu tại M
C
kẻ tiếp tuyến với vòng
đẳng cao thì đường thẳng tiếp tuyến là đường cao vị trí và luôn luôn vuông
góc với đường phương vị. Như vậy tại thời điểm quan sát thiên thể, đồng thời
xác định
, t
G
và
C
từ vị trí dự đoán M
C
(
C
,
C
) tính được A
C
, xác định k
1
bằng phương pháp kinh độ khi thay
C
vào phương trình [1] :
I
I
a
B
B’
M
C
A
C
k
1
Hình 1.5. Đường vị trí xác định theo phương pháp Akimov
14
sinh
S
= sin
C
.sin
+ cos
C
.cos
.cos(t
G
1
). (1.15)
Sau đó dựng đường vị trí (hình 1.5) như sau: từ điểm k
1
(
C
,
1
) kẻ
phương vị A
C
tiếp theo dựng đường vuông góc với A
C
tại k
1
được đường vị trí.
Quan sát thiên thể thứ 2, đồ giải 2 đường vị trí cho vị trí tàu.
1.2.2.4. Phương pháp hiệu độ cao Saint - Hilaire
Sử dụng các đường cao vị trí do nhà hàng hải người Pháp Saint-Hilaire
đề xuất năm 1875, phương pháp hiệu độ cao hoàn thiện hơn các phương pháp
trước đây và được sử dụng đến ngày nay (hình 1.6), giả sử thời điểm T
G
người
quan sát đứng tại vị trí M
O
(
o
,
o
) đo độ cao thiên thể, hiệu chỉnh được độ cao
thật h
S
và tính được đỉnh cự Z
S
= 90
0
- h
S
. Đồng thời, lấy vị trí dự đoán M
C
(
c
,
c
), từ các thông số (
, t
L
,
c
) thay vào công thức hoặc tra vào bảng toán nhận
được độ cao dự đoán h
C
, phương vị dự đoán A
C
, đỉnh cự tại vị trí dự đoán Z
C
=
90
0
- h
C
.
Xác định cực chiếu sáng a của thiên thể trên hải đồ với toạ độ (
a
=
,
a
= t
G
) lấy cực chiếu sáng a làm tâm vẽ vòng đẳng cao bán kính Z
C
qua vị trí
dự đoán M
C
; vòng đẳng cao bán kính Z
S
qua vị trí thật M
o
cách vòng đẳng cao
Z
C
một đoạn h = Z
C
- Z
S
= (90
0
- h
C
) - (90
0
- h
S
) = h
S
- h
C
. Rõ ràng là đường
thẳng aM
C
(hay là đường hướng phương vị A
C
) sẽ vuông góc đồng thời với
Δh
Hình 1.6. Đường vị trí xác định theo phương pháp hiệu độ cao
M
C
c
A
C
N
T
φ
c
15
các vòng đẳng cao bán kính Z
C
và Z
S
. Do vậy tại giao điểm của vòng đẳng cao
Z
S
với phương vị A
C
dựng đường thẳng tiếp tuyến với vòng đẳng cao Z
S
thì đó
chính là đường cao vị trí và cũng vuông góc với A
C
.
Nội dung phương pháp hiệu đường cao xác định vị trí tàu như sau [1,
5]: tại thời điểm T
t1
quan sát độ cao thiên thể C
1
được OC
1
hiệu chỉnh các đại
lượng (i, s, d,
0
, h
t,B
) cho độ cao thật h
S1
của thiên thể C
1
. Đồng thời, ghi giờ
thời kế T
TK
lúc quan sát thiên thể, kết hợp với U
TK
được T
G1
tra vào lịch thiên
văn hàng hải được tọa độ xích đạo của thiên thể C
1
(
1
, t
G1
). Thực hiện tương
tự, tại thời điểm T
t2
quan sát độ cao thiên thể C
2
được OC
2
hiệu chỉnh cho độ
cao thật h
S2
của thiên thể C
2
, tọa độ xích đạo của thiên thể C
2
(
2
, t
G2
).
Lấy vị trí dự đoán M
C
(
c
,
c
), từ các thông số (
c
,
1
, t
G1
), (
c
,
2
, t
G2
)
tra vào bảng toán hoặc hệ công thức để tính toán các giá trị độ cao, phương vị
(h
C1
, A
C1
), (h
C2
, A
C2
). Sau khi có các yếu tố đường cao vị trí, đồ giải xác định
vị trí như (hình 1.7): xác định vị trí M
c
(
c
,
c
), từ M
c
kẻ 2 đường hướng đến
cực chiếu sáng, mỗi đường tạo với đường kinh tuyến N
T
các góc A
c1
, A
c2
, kẻ 2
đường cao vị trí vuông góc với 2 đường trên, khoảng cách từ 2 đường cao vị
trí đến vị trí dự đoán lần lượt là h
1
= h
S1
- h
C1
, h
2
= h
S2
- h
C2
. Giao điểm của
2 đường vị trí cho vị trí tàu tại thời điểm quan sát, trường hợp tốc độ tàu,
khoảng thời gian giữa 2 lần quan sát, tốc độ biến thiên độ cao thiên thể lớn,
cần thiết phải hiệu chỉnh độ cao thiên thể từ thời điểm trước về thời điểm sau,
vị trí tàu xác định theo hệ thức (1.16) hoặc (1.17):
(
Δ sin Δ sin )
Δ
sin( )
(
Δ cos Δ cos )
Δ
)
cos sin(
1 2 2 1
2 1
1 2 2 1
1 2
h . A - h . A
φ=
A - A
h . A - h . A
λ =
φ. A - A
(1.16)
Nếu xét đến ảnh hưởng do thời gian quan sát không đồng thời, tốc độ tàu lớn: