HỆ THỐNG TRUYỀN LỰC Ô TÔ CAO HỌC ĐH BÁCH KHOA HÀ NỘI CHƯƠNG 3 DAO ĐỘNG XOẮN VÀ CÁC CHẾ ĐỘ TẢI TRỌNG ĐẶC TRƯNG TRONG HTTL ÔTÔ
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (1.2 MB, 50 trang )
NỘI DUNG
3.1- Khái niệm
3.2- Mô phỏng HTTL bằng mô hình dao động xoắn
3.2.1- Xây dựng sơ đồ mô phỏng hệ thống
3.2.2- Xây dựng mô hình toán học mô tả hệ thống
3.2.3- Một số mô hình điển hình
3.2.4- Phương pháp giải bài toán và đặc tính dao động xoắn HTTL
3.3- Các chế độ tải trọng đặc trưng
3.3.1- Tải trọng từ dao động mô men xoắn của động cơ
3.3.2- Tải trọng từ mấp mô mặt đường
3.3.3- Một số điều kiện sử dụng gây tải trọng động lớn trong HTTL
và phương pháp tính toán.
CHƢƠNG 3- DAO ĐỘNG XOẮN VÀ CÁC CHẾ ĐỘ
TẢI TRỌNG ĐẶC TRƢNG TRONG HTTL ÔTÔ
• Bản chất các hiện tượng vật lý trong HTTL:
– Truyền chuyển động quay:
Tải trọng = mô men xoắn;
– Hệ thống đàn hồi:
• Tích lũy, giải phóng năng lượng (thế năng)
tải trọng động lớn
• Dao động xoắn: ảnh hưởng chế độ làm việc
tăng tải động
cộng hưởng
mỏi.
• Các chế độ tải trọng đặc trưng:
– Tải trọng động do điều kiện sử dụng:
• Phanh ngặt không ngắt ly hợp;
• Đóng ly hợp đột ngột, …
– Tải trọng động do dao động mô men xoắn của động cơ;
– Tải trọng động do mấp mô mặt đường.
• Phương pháp xác định tải trọng:
– Mô phỏng HTTL bằng mô hình dao động xoắn tính tải trọng;
– Đo bằng thực nghiệm.
1- TỔNG QUAN
Khái niệm mô phỏng:
• Mục đích:
Nghiên cứu bản chất của các hiện tƣợng vật lý trong thiên nhiên và kỹ
thuật bằng cách mô hình hóa, mô phỏng với sự hỗ trợ của máy tính.
• Phƣơng pháp:
– Mô tả hệ thống cơ học bằng sơ đồ mô phỏng mô hình mô phỏng;
– Xây dựng hệ phƣơng trình mô tả hệ thống mô hình toán học.
• Các bƣớc tiến hành:
– Xây dựng mô hình vật lý (cơ học);
– Mô hình mô phỏng;
– Xây dựng mô hình tính toán (hệ phƣơng trình vi phân);
– Giải hệ phƣơng trình và đánh giá kết quả.
• Ý nghĩa:
– Cho phép tìm hiểu các hiện tƣợng vật lý xảy ra trong hệ thống mà
không cần tiến hành thực nghiệm;
– Tiết kiệm thời gian, công sức và chi phí trong quá trình thiết kế, chế
tạo.
• Hạn chế:
– Mức độ chính xác và tin cậy của kết quả tính toán phụ thuộc nhiều vào
phƣơng pháp và các giả thiết trong quá trình mô phỏng;
– Đối với các bài toán phức tạp, khối lượng tính toán lớn đòi hỏi máy tính
mạnh, thời gian tính toán dài.
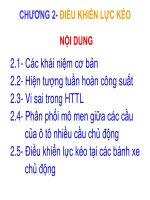
2- Mô phỏng HTTL bằng mô hình dao động xoắn
Ví dụ: Mô phỏng hệ thống treo ô tô
Sơ đồ hệ thống
F
k
z
k
C
m
Sơ đồ mô phỏng
Mô hình mô phỏng
Hệ phƣơng trình mô tả hệ thống:
k
FCzzkzm
Mô hình toán học
)(tzz
Giải hệ phƣơng trình:
Mô hình vật lý
MÔ TẢ PHẦN TỬ CỦA HTTL
TRONG MÔ HÌNH DAO ĐỘNG XOẮN
Các thông số đặc trƣng:
• Mô men quán tính: I khối lượng, hình dạng;
• Hệ số độ cứng: C tính đàn hồi (hệ số đàn hồi: e = 1/C);
• Hệ số cản nhớt: b nội ma sát.
M
x
1
2
M
x
I, C, b
Đặc điểm:
• Chuyển động quay;
• Chịu mô men xoắn.
Các mô men tác động:
• Mô men quán tính: M
j
=
• Mô men đàn hồi: M
x
= C. (
2
-
1
)
• Mô men nội ma sát: M
b
= b. (
2
-
1
)
I
2
1
. .
Xây dựng sơ đồ mô tả hệ thống
Mô hình cơ học và Sơ đồ tính toán tương ứng.
e
12
I
0
I
1
I
2
I
3
I
4
I
5
I
6
e
23
e
35
e
46
e
57
I
7
I
8
I
9
e
89
e
810
e
78
I
p
e
p
I
10
I
'
0
I
'
1
I
'
2
I
'
5
I
'
3
e
'
34
I
'
4
I
'
6
e
'
45
e
12
e
'
46
e
'
57
I
'
7
I
'
8
I
'
9
I
'
10
I
'
p
e
'
810
e
'
89
e
'
p
e
'
78
e
'
23
Phƣơng pháp xây dựng sơ đồ tính toán
và hệ phƣơng trình mô tả hệ thống
I'
1
Mô hình cơ học
I'
2
e
1
e
2
i
Mô hình mô phỏng
I
1
I
2
e
12
I
1
= I'
1
; I
2
= I'
2
/ i
2
;
e
12
= e
1
+ i
2
e
2
.
Công thức chuyển đổi
Ví dụ chuyển đổi từ mô hình cơ học sang sơ đồ động lực (tính toán).
Giả sử các khối lượng 1 và 2 bị xoắn đi các góc tương ứng là
1
và
2
, thì động năng của hệ thống
được tính bằng tổng động năng của các khối lượng:
Thế năng của hệ thống bằng tổng thế năng của hai phần tử:
Phương trình Lagrange loại II:
2
22
2
11
2
2
2
'
2
2
11
2
1
2
1
2
1
'
2
1
II
i
I
IE
k
12
2
21
2
1
e
E
p
Hệ phương trình vi phân
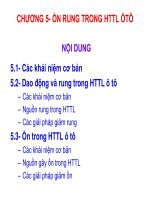
Ví dụ: Mô phỏng HTTL bằng mô hình dao động xoắn
I
2
I
3
e
23
M
c
I
1
I
4
I
5
M
e
e
34
e
45
M
M
f
Mô hình mô phỏng HTTL với 5 khối lượng
ce
MMI
11
c
M
e
I
32
23
22
1
0
11
43
34
32
23
33
ee
I
f
M
ee
I
54
45
43
34.
44
11
0
1
54
45
55
e
I
Hệ phương trình vi phân mô tả hệ thống:
Điều kiện tính toán
T
a
f
i
rfgm
M
0
T
i
rG
M
0
kt
cc
eMM
1
max
maxmax ec
MM
c
t
k
3
;
04,001,0
c
t
ff
f
f
MMkhiM
MMkhi
M
45
45
,
,0
MM
45
I
2
I
3
e
23
M
c
I
1
I
4
I
5
M
e
e
34
e
45
M
M
f
Nếu M
45
> M
φ
Ví dụ 1- Mô phỏng hoạt động của Ly hợp
Sơ đồ mô phỏng và phân tích lực
11
1 1 1
2 2 2
22
.
.
.
.
DC dc
c
c
c oto
I M M
I M M
I M M
I M M
Hệ phương trình:
2
100 3
.
dc
M
oto
sin5t
Mk
Điều kiện tính toán:
Sơ đồ tính toán bằng Matlab - SIMULINK
Kết quả tính toán
Mô men M
đc
của động cơ
Mô men M1 phần chủ động của ly hợp
Đồ thị quá trình trƣợt ly hợp
Ví dụ 2- Mô phỏng hộp số
Mô hình cơ học
Mô hình mô phỏng
Mô hình bánh răng ăn khớp
b
c,
b
a
o 1
o 2
P
M1;
M2;
r
r
r
r
c1
c2
1
2
SƠ ĐỒ CÁC MÔ MEN TÁC DỤNG LÊN CÁC PHẦN TỬ
Mô hình toán học
( ) ( )
1 1 1 2 1 1 2
( ) ( )
2 2 3 4 2 3 4
( ) ( )
3 3 3
5 6 5 6
/2
( . . ) ( . . ). .cos
2 2 2 3 3 2 2 3 3 2
/2
( . . ) ( . . ). .cos
3 2 2 3 3 2 2 3 3 3
/
( . . ) ( . . ).
4 4 4 4 4 4
5 5 5 5
M c b
M c b
M c b
M c r r b r r r
w
M c r r b r r r
w
M c r r b r r r
2
.cos
/2
( . . ) ( . . ). .cos
4 4 4 4
5 5 5 5 5 5
w
M c r r b r r r
w
Hệ phƣơng trình
Trong đó:
0,8
40(1 )
t
eMdc
.Mk
oto
Điều kiện:
I -M
11
/
I -M
22
/
I M -M
3 3 2
/
I - M
44
/
I M -M
5 5 3
I -M
6
dc
3 dc
oto
Kết quả tính toán
Kết quả tính toán
Kết quả tính toán
Ví dụ 3- Mô phỏng cầu chủ động
bc3
M®c
T
M4c M3c
P
P
bc1
bc4
bc4
bc2
I®c
I2; r2
I3; r3
I4
IcP
IcT
I4
I®c
M1
M1
M4
M4t
M4t
T
M4c M3c
M3
M3p
P
M3p
P
I2; r2
I3; r3
I4
IcT IcP
M®c
I4
Mô men trên các phần tử
bc3
M®c
M1
M1
bc1
bc2
I®c
I2; r2
M1
I4
M2
M0
Truyền lực chính
DC 1 DC 1
/
2 1 1 1
/
3 3 2 0
I . M M
I . M M
I . M M
1 1 1 1 1 1 1
/2
1 2 2 2 3 3 2 2 2 3 3 2
/2
2 2 2 2 3 3 2 2 2 3 3 3
0 3 3 3 3 3 3
M c b
M c r r b r r r .cos
M c r r b r r r .cos
M c b
M4
M4t
M4t
T
M4c M3c
M3
M3p
P
M3p
P
I4
IcT IcP
I4
Các bán trục
4 4T 4 4T
CT 4T 4T CT
4T 4 4T 4T 4 4T 4T
CT 4T
I . M M
I . M M
M c b
M k.
4 4P 4 4P
CT 4P 4P CP
4T 4 4P 4P 4 4P 4P
CT 4P
I . M M
I . M M
M c b
M k.
Kết quả tính toán
Mô men động cơ
Mô men trên trục chủ động