Bài giảng Lý thuyết hệ thống và điều khiển học: Phần 2 - ĐH CNTT&TT
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (989.52 KB, 61 trang )
Chương 4
MỘT SỐ BÀI TOÁN ĐIỀU KHIỂN TỐI ƯU QUAN TRỌNG
4.1 Đặt vấn đề
Giống như bài toán tối ưu nói chung, các bài toán điều khiển tối ưu có rất
nhiều dạng khác nhau, tùy theo điều kiện tối ưu và tiêu chuẩn tối ưu mà người ta đặt
ra. Tuy nhiên, một cách khái quát bài toán điều khiển tối ưu rời rạc có thể đặt ra như
sau:
Cho T= {0,1,2,...,N} tập các điểm rời rạc.
U là tập các điều khiển chấp nhận được và giả sử động thái của hệ được mô tả
bởi:
X(t)= G[x(t0) , u(t), t0, t]
Y(t)= H[x(t), u(t), t]
Trong đó : u(t) U
G: (X x U x T x T) →X
H: (X x U x T) → Y
Giả sử S X x Y x T là tập mục tiêu. Ta nói rằng tác động u(t) U chuyển
(x0, t0) đến S nếu x(t0) = x0 và
{G[x(t0) , u(t), t0, t] ; H[G[x(t0) , u(t) , t0, t]; t t0]} S Ø
Nếu t1 là thời điểm sớm nhất mà
(x(t), y(t), t) S
Thì t1 –t0 gọi là thời gian chuyển. Khi đó bài toán điều khiển tối ưu hệ thống
mà ta đang xét là:
F(x0, t0, u(t),t1) → min
Trong đó F là phiếm hàm mục tiêu hay phiếm hàm chất lượng.
Ví dụ:
Xét nền kinh tế với thời gian rời rạc:
x(t+1) = (1-b)x(t) + z(t)
87
x(0) = x0, x(N) M
y(t) = c(t) +z(t)
Trong đó : x(t) là vốn cơ bản, b là tỷ lệ hao mòn vốn cơ bản 0
y(t) là thu nhập quốc dân, c(t) quỹ tiêu dùng ở năm t
Tham số điều khiển là u(t)=
z (t )
là tỷ lệ tích lũy ở năm t.
y (t )
Thông thường thu nhập quốc dân là hàm của vốn cơ bản
y(t)= h[x(t)] z(t)=u(t)h[x(t)]
Khi đó ta có bài toán:
x(t+1)= ax(t) + u(t) h[x(t)]
x(0) = x0 , x(N) M
N 1
F=
(1 u(t ))h[ x(t )] max
t 0
Trong đó a=1-b; 1-u(t) là tỷ lệ tiêu dùng
Mục tiêu của bài toán điều khiển ở đây: chọn tỷ lệ tích lũy hàng năm như thế
nào để cho đến năm N vốn cơ bản x(N) M (đạt được mức M) và tổng quỹ tiêu
dùng cho cả kỳ kế hoạch là lớn nhất. Nếu tính tới hệ số chiết khấu tiền tệ α(t) thì
hàm mục tiêu sẽ là:
N 1
F=
(1 u (t )) (t )h[ x(t )] max
n0
Nếu hệ số chiết khấu hàng năm là không đổi thì α(t) = αN-1-t trong đó α>1.
Khi nghiên cứu các bài toán điều khiển tối ưu trong thực tế; có 3 vấn đề quan
trọng mà ta sẽ đề cập đến trong chương này:
- Một là bài toán điều khiển hệ động cỡ lớn và có nhiều bước. Vấn đề đặt ra là
ta phải tìm toàn bộ quỹ đạo của hệ trong tình huống mà cấu trúc của hệ trong tình
huống mà cấu trúc của hệ trong tình huống mà cấu trúc của hệ cũng có thể thay đổi
theo thời gian. Tất nhiên đối với bài toán rời rạc về thời gian, ta có thể đưa bài toán
động về bài toán tĩnh bằng cách tăng thứ nguyên của bài toán. Theo cách này ta sẽ
gặp khó khăn khi giải quyết các bài toán cỡ lớn. Vì vậy phải tìm mọi cách xử lý
khác, chẳng hạn thuật toán phân chia tương tự như trong phương pháp Quy hoạch
88
động: phân chia bài toán tối ưu trong không gian n chiều thành n bài toán tối ưu 1
chiều.
- Hai là đối với bài toán điều khiển các hệ thống phức tạp, cấu trúc của hệ
thường là yếu, thông tin lại không đầy đủ, thậm chí mục tiêu cũng không rõ ràng.
Trong trường hợp này lý thuyết “tối ưu mờ“ có thể là một cách tiếp cận bắt buộc và
có hiệu quả.
- Ba là Bài toán điều khiển tối ưu theo nhiều mục tiêu đồng thời trong đó có
những mục tiêu không tương thích với nhau và cũng có những mục tiêu mâu thuẫn
nhau; ở đây lý thuyết cực trị thông thường tỏ ra không thích hợp, chúng ta phải tìm
một giải pháp khác.
Ta sẽ lần lượt nghiên cứu giải pháp cho từng tình huống nêu trên.
4.2 Điều khiển tối ưu của hệ động cỡ lớn nhiều bước
Trong phạm vi cuốn sách này ta chỉ xét những hệ tuyến tính để việc diễn giải
dễ dàng hơn và thuật toán phân chia cũng dễ thực hiện hơn, đối với những hệ phai
tuyến, về nguyên tắc vẫn có thể áp dụng nhưng kỹ thuật tính toán cụ thể đòi hỏi
phải có những bổ sung thích hợp do đó phức tạp hơn.
Bài toán quy hoạch tuyến tính nhiều bước tổng quát có dạng:
F[x(t) , u(t), c(t)] min
x(t+1) =Ax(t) +Bu(t) +S(t)
Px(t)+ Qu(t) R(t)
x(t) 0, t=0,1,2,...,N
Ví dụ : bài toán lập kế hoạch sản xuất có dạng
N
F=
c(t ), u(t ) min
t 1
x(t) = x(t-1) +Bu(t) – h(t)
Du(t) = d(t)
x(0) =x0
Trong đó :
x(t) mức dự trữ sản phẩm ở năm t
u(t) mức hoạt động sản xuất ở năm t
B ma trận các hệ số “hoạt động – ra“
89
D ma trận các hệ số “hoạt động – vào“
h(t) mức tiêu thụ ở năm t
d(t) hạn chế về tài nguyên, công suất ở năm t.
c(t) chi phí (hao phí) cho một đơn vị cường độ hoạt động sản xuất ở năm t.
Để giải bài toán này ta có thể đổi chỉ số để đưa về bài toán quy hoạch tuyến
tính thông thường, nhưng tốt hơn vẫn là lợi dụng cấu trúc đặc biệt của bài toán này
để giải trực tiếp bằng cách phân chia thành các bài toán nhỏ, theo phương pháp
phân chia của Dantzig – Wolfe.
Ta viết lại bào toán này như sau:
Du(1) = d(1)
x(1) +Bu(2) – x(2) = h(2)
Du(2) = d(2)
...
X(N-1)+Bu(N) =x(N) = h(N)
Du(N) =d(N)
Cấu trúc của bài toán này rất đặc biệt, nó bao gồm các khối tuy có “dính” nhau
nhưng chỉ “dính” rất ít. Phương pháp Dantzig – Wolfe cho phép tách bài toán này
thành dãy các bài toán con đơn giản hơn. Cụ thể là :
- Khối (1) độc lập với các khối khác, nên có thể tách ra thành một bài toán con
để giải.
<C(1),u(1)> min
x0 +Bu(1) – x(1) = h(1)
Du(1) = d(1)
Trong bài toán này có dính đến x0 nhưng x0 là điều kiện ban đầu cho trước
- Khối (2 ) có dính đến khối (1) bởi x(1)
<C(2),u(2)> min
X(1) +Bu(2) – x(2) = h(2)
90
Du(2) = d(2)
Nhưng khi giải bài toán khối (1) thì x(1) đã được hoàn toàn xác định một cách
tối ưu và được coi là điều kiện ban đầu của bài toán khối (2).
- Khối (N) tương tự như trên có dính đến khối (N - 1) bởi x(N-1), đã được xác
định một cách tối ưu khi giải bài toán khối (N-1)
<C(N),u(N)> min
x(N-1) +Bu(N) – x(N) = h(N)
Du(N) = d(N)
Và x(N-1) được coi là điều kiện ban đầu của bài toán khối (N). Nhờ cách này
ta đã phân chia được một bài toán N bước cỡ lớn thành N bài toán 1 bước cỡ nhỏ và
đơn giản hơn.
Đối với bài toán quy hoạch tuyến tính cỡ lớn, bên cạnh thuật toán phân chia
như trên, phương pháp nhân tử Lagrange tỏ ra có hiệu lực. Chẳng hạn ta xét bài
toán
F(x)= CTx min
Ax b, x 0
Trong đó CT là chuyển vị của C
Ta viết lại điều kiện Ax b dưới dạng g(x)= b-Ax 0, khi đó hàm Lagrange có
dạng.
L(x, )= CTx + λT(b-Ax) = (C – ATλ)x + λTb
Trong đó C Rn, λ Rm còn λT là chuyển vị của λ.
Bài toán tìm cực tiểu của hàm L(x,λ) tương đương với bài toán đối ngẫu
λTb max
ATλ C, λ 0
Trong thực tế, có không ít trường hợp, bài toán đối ngẫu dễ giải hơn bài toán
gốc; khi ấy phương pháp nhân từ Lagrange cho phép chúng ta phân chia một bài
toán quy hoạch lồi cỡ lớn thành một dãy các bài toán quy hoạch lồi đơn giản hơn,
với một số giả thiết nhất định.
91
4.3 Điều khiển tối ưu mờ
4.3.1 Vấn đề
Khi nào xuất hiện bài toán điều khiển tối ưu mờ?
- Trước tiên để lựa chọn một tác động điều khiển thì ta phải biết tập các
phương án có thể có để lựa chọn. Trong trường hợp thiếu những thông tin xác định,
thì tập các phương án này là không rõ ràng là mờ. Ví dụ như trong bài toán quy
hoạch tuyến tính, tập các phương án có dạng {Ax=b, x 0}, trong đó thành phần bi
của vec- tơ b lại không xác định; mà chỉ biết bi lấy các giá trị trong khoảng [αi, βi]
với các xác xuất tương ứng khác nhau; đó là lý do mà ta phải nghiên cứu điều khiển
mờ.
-
Muốn lựa chọn tác động điều khiển, ta phải biết mục tiêu điều khiển, coi đó
là tiêu chuẩn so sánh để lựa chọn phương án. Nhưng trong nhiều trường hợp mục
tiêu lại không rõ ràng, ví dụ như: phương án lựa chọn phải “khá gần y” hoặc sau 3
năm phải xóa được đói và giảm được nghèo, xóa đói là rõ, nhưng giảm nghèo lại là
mờ, một số mục tiêu như phấn đấu giảm lạm phát, theo định hướng xã hội chủ
nghĩa trở thành một nước công nghiệp tiên tiến,.v.v… đều là các khái niệm mờ.
Mục tiêu ta muốn đạt đến là khái niệm mờ thì vấn đề tối ưu đặt ra phải là “tối ưu
mờ”.
Như vậy là, nếu bài toán điều khiển đặt ra mà “ràng buộc không rõ” hoặc
“mục tiêu không rõ” hoặc “cả ràng buộc và mục tiêu đều không rõ” thì chúng ta
phải xử lý theo những nguyên tắc của “lý thuyết mờ”; vì vậy các bài toán đó gọi là
các bài toán “điều khiển tối ưu mờ”.
Để giải quyết vấn đề này, trước tiên chúng ta cần tìm hiểu một số khái niệm cơ
bản của lý thuyết mờ.
4.3.2 Một số khái niệm cơ bản trong lý thuyết mờ
a)Định nghĩa tập mờ
Để trình bày khái niệm tập mờ được dễ hiểu ta quy ước gọi khái niệm tập hợp
mà ta đã quen biết là “tập rõ”. Cho một “tập rõ” A, ta đưa ra một đối tượng x nào đó
thì phải khẳng định được:
- Hoặc là x A; điều này cũng có nghĩa là P {x A}=1 tức là xác suất để x A
là bằng 1, đó là sự kiện chắc chắn.
- Hoặc là x A, tương đương với P{x A}=0. Không có trường hợp nào khác.
92
Bây giờ ta xét trường hợp mà ta không khẳng định được x có thuộc A hay
không mà chỉ khẳng định được x thuộc A với một xác suất nào đó. Khi đó A gọi là
tập mờ . Một cách khái quát ta có định nghĩa tập mờ như sau.
Ký hiệu X là “tập vũ trụ” trong vấn đề đang xét ; A X được cho bởi ánh xạ
A:X →L= [0,1]
Được gọi là “tập mờ” (fuzzy set )của X.
Như vậy ứng với mỗi x X ta có một số A(x) [0,1] biểu thị mức độ “x
thuộc A”. Nếu A(x) gần 0 thì mức độ x thuộc A là thấp; và như vậy mỗi phần tử
của X thuộc tập mờ A với những mức độ khác nhau từ [0,1].
Hàm A gọi là hàm thuộc (membership function), như vậy một tập rõ của X,
có thể xem như một tập mờ mà hàm thuộc chỉ lấy giá trị 0 hoặc 1 mà không lấy các
giá trị trung gian:
A(x) {0,1} x A
X đôi khi gọi là không gian nền.
Giá tựa của tập mờ A , ký hiệu là suppA là tập con (rõ) của X được xác định
bởi
suppA={x X; A(x)>0}
Đôi khi ta còn ký hiệu tập mờ như sau:
A={
x
A( x) , x sup pA
}
Tức là liệt kê tất cả các phần tử x của A, kèm theo giá trị của hàm
A(x)>0. Ví dụ X là tập các số tự nhiên từ 1 đến 10 và
A={ 3 0,5 , 4 0,2 , 5 0,8 , 81 , }
Có nghĩa là tập mờ mà A(3)= 0,5, A(4)= 0,2; A(5)= 0,8; A(8)=0,1 và
A(x)=0 với các số tự nhiên còn lại. Khi định nghĩa một tập mờ A nếu x
x
1 ( x)
và
x
x
2 ( x) đều xuất hiện và 1(x)< 2(x) thì chỉ lấy 2 ( x) và bỏ đi 1 ( x) và tập
A được thu gọn lại
Ví dụ: A={ a 0,2 , a 0,5 , b 0,1 } thì rút gọn lại thành A= { a 0,5 , b 0,1 }
93
Tập mức của A. [0,1]; tập mức của A ký hiệu là
N ( A ) ={ x X; A(x) }
Dễ dàng thấy rằng đây là một tập rõ và N0( A)= X
b) Các phép toán trên tập mờ
Trước tiên ta quy ước nếu u,v là 2 số thực thì
u v= max {u, v}
u v= min{u, v}
- Hợp của 2 tập mờ A và B là tập mờ A B mà
A B(x)= A(x) B(x)
Hoặc có thể viết:
A B={ x ( x) : x sup pA sup pB; A ( x) B ( x) }
- Giao của hai tập mờ A và B là tập mờ A B mà
A B(x)= A(x) B(x)
Hoặc cũng có thể viết
A B={ x ( x) : x sup pA sup pB; A ( x) B ( x) }
Phần bù của tập mờ A là tập mờ A={
x
(x) : x 1A(x) với
A(x)<1}
Trong đó A là phủ định A,
Tức là supp A={x: A(x)<1}
Ánh xạ của tập mờ A
Cho f: X →Y là ánh xạ thường A f(X): trong đó f(X) là họ các tập con mờ
của X thì ảnh của tập mờ A qua ánh xạ f cũng là tập mờ được định nghĩa như sau:
y
1
f(A)= { ( y). f ( y) Ø; (y)=
V A(x)
xf 1( y)
}
Tổng quát hơn: Nếu f: X1 x X2 x ...x Xn →Y; Ai f(Xi) thì
F(A1, A2,...,An)=
94
y
1
{ ( y). f ( y) Ø; (y)=
V
x1, x2 ,...,xnf 1( y)
A1 (x1) A2 (x2 ) ... An (xn ) }
Tích của tập mờ A với số thực λ là ảnh của tập mờ A qua ánh xạ: x →λx
λA={ x ( x) : x sup pA; ( x) A ( x ) }
Vậy : Tổng của 2 tập mờ A và B là tập mờ A+B= f(A,B)
Trong đó : f: X x X →X là ánh xạ (x1 , x2)→ x1 + x2
Vậy:
A(x1) B (x2 ) }}
A+B= x ( x) : x sup pA sup pB; ( x) { xV
1x2
Tích trực tiếp của 2 tập mờ A và B là tập mờ A x B
A x B= { ( x, y ) ( x, y) : x A, y B; ( x, y ) A ( x ) B ( y ) }
c) Quan hệ giữa 2 tập X và Y: là tập con mờ của X x Y
R={ ( x, y ) ( x, y) : x X , y Y }
R
Trong đó: R ( x, y) : X x Y→[0,1]
Mở rộng quan hệ mờ n ngôi: là tập mờ của X1 x X2 x…x Xn
R x1 , x2 ,..., xn ( x , x ,..., x ) xi X
R
1
2
n
( i 1, n )
Trong đó R ( x1 , x2 ,..., xn ):
X1 x X2 x…x Xn→[0,1]
Phép hợp thành R● S của các quan hệ mờ
Cho R là quan hệ mờ giữa X và Y
S là quan hệ mờ giữa Y và Z
Thì hợp thành R● S là quan hệ mờ
R● S ={( ( x, z ) ( x, z ) ) :x X, z Z}
( x, z ) =y V{ R ( x, y ) S ( y, z ) }
95
Khi áp dụng lý thuyết mờ để nghiên cứu các bài toán điều khiển tối ưu mờ,
một điều cần nhấn mạnh là: đối tượng nghiên cứu là mờ nên vệc tính toán có nhiều
phiền phức hơn so với đối tượng nghiên cứu là rõ, nhưng phương pháp nghiên cứu
vẫn phải dựa trên những tư duy rõ ràng, chặt chẽ và chính xác như khi nghiên cứu
các đối tượng toán học rõ ràng khác.
4.3.3 Bài toán tối ưu mờ
Trong ngôn ngữ của lý thuyết mờ, muốn lựa chọn một quyết định phải có bộ
ba sau đây:
- Tập các phương án để lựa chọn : X
- Tập các ánh xạ μ0 , μ1,...,μm: X→ L=[0,1] xác định các tập con mờ A0, A1, ...,
Am của X, biểu thị các tiêu chuẩn so sánh các khả năng.
D= μ0 μ1 ... μm
Khi đó ta nói một bài toán tối ưu mờ được cho bởi bộ ba (X, D, L) là bài toán
tìm x* X (nếu có) sao cho:
D(x*)=
supD(x)
xX
x* được gọi là phương án tối ưu của bào toán. Đó là cách đặt vấn đề của
Bellman và Zadeh.
Chú ý: Thực ra trong bài toán của Bellman và Zadeh, L không nhất thiết phải
là khoảng [0.1] mà chỉ đòi hỏi “L là 1 dàn phân phối đầy đủ” theo nghĩa:
- Mọi tập con trong L đều có cận trên đúng và cận dưới đúng.
- x, y L, tồn tại cận trên bé nhất x y và cận dưới lớn nhất x y thỏa
điều kiện (tính chất phân phối)
(x y) z=(x z ) (y z )
Dưới đây ta chứng minh một số mệnh đề làm cơ sở cho việc giải quyết bài
toán tối ưu mờ nêu trên.
Cho X là 1 tập; L=[0,1], mỗi tập con mờ của X được cho bởi ánh xạ
μ: X→L; để cho tiện ta gọi μ là tập mờ, (tức là đồng nhất tập mờ với hàm
thuộc μ của nó)
Với mỗi α L; tập Nα(μ)={x X: μ(x> α)} gọi là tập mức α của tập mờ μ;
96
Ký hiệu M(X) là họ tất cả các tập mờ của X. Ta chứng minh một số mệnh đề
sau:
Mệnh đề 1:
Nếu μ M(X) thì μ= V ( (a ) )
L
Trong đó ( a ) là hàm đặc trưng của tập mức Nα(μ), tức là:
1nếu x Nα(μ)
0nếu x Nα(μ)
(a ) (x)=
với μ (x)
1)
(a ) (x)= Nếu trái lại
0
Chứng minh:
V (α ( ) )( x) = V ( ) ( x) V ( ) ( x)
N ( )
N ( )
L
=
V
N ( )
( 1) = V
N ( )
= μ(x) điều phải chứng minh
Bây giờ xét bài toán tối ưu mờ(X,D,L)
D=μ0 μ1 ... μm; L=[0,1]
Ta sẽ chứng minh rằng: sup D(x) = sup 0 (x) với một A X nào đó.
xA
xA
Mệnh đề 2:
Sup D(x)= V
1 ..., m L
[α1 α2 … αm
Chứng minh:
Trước tiên chú ý rằng
m
1 1 ... m m = N αi(μi)
i 1
Theo mệnh đề 1 ta có:
μi = V ( 1 1( ) ) (i=1,2,…,m); do đó, ta có :
1
1L
97
0 ( x) ]
sup
1(1 ) ... m ( m
)
supD(x)= V [ μ0(x) μ1(x) ... μm(x)]
x X
= V [ μ0(x) V ( α1 1 ( x)) … V ( αm m (x)) ]
m
1
x X
1L
m L
Do tính chất phân phối nên:
D(x)= V
V
[ α1 … αm 0 ( x) 1 ( x) ... m ( x) ]
1
x X 1 ..., m L
m
= V
[ α1 … αm V ( 0 ( x) 1 ( x) ... m ( x) )]
= V
[ α1 … αm sup 0 ( x ) ]
m
x N i ( i )
1 ..., m L
1 ..., mL
1
m
x X
i 1
Đó là điều cần chứng minh.
Không giảm tính tổng quát của bài toán, ta có thể coi như bài toán chỉ có một
ràng buộc μ (m=1). Khi đó D=μ0 μ.
Ta xét hàm φ: L→L sao cho: φ (α)=
sup 0 ( x)
xN ( )
Khi đó ta có:
(α β) (N α(μ) N β(μ)) ( φ (α) φ (β)) α,β L
Ký hiệu g(α)= α φ (α) ;
Theo mệnh đề 2 ta có:
Sup D(x) = V ( α sup (x))
L
xN ( )
= V ( α φ (α))= V g(α)=
L
L
sup
g(α)
L
Mệnh đề 3:
Nếu φ là hàm liên tục thì L sao cho: φ ( ) = và = sup g(α)
L
Chứng minh:
Sự tồn tại của là do định lý điểm bất động.
Chỉ cần chứng minh =
sup
g(α)
L
98
Nếu α < thì
φ (α) φ ( )= >α
g(α)= α φ (α)= α <
Còn nếu >α thì
φ (α) φ ( )= <α
g(α)= α φ (α)= φ (α)<
Tóm lại:
g(α)< với α <
g(α)< với α >
Vậy
=
sup
sup
g(α)=
L
D(x)
L
Như vậy để có cực đại của 0 với ràng buộc mờ thì phải tìm cực đại của 0
N ( )
trên tập rõ:
Định lý 1:
Với giả thiết φ liên tục
sup
D(x)=
L
sup
0 (x)
xL
Trong đó: A={x X: (x) 0 (x)}
Chứng minh:
sup
[ 0 (x) (x)]= ( sup 0 (x)) ( sup (x))
xL
xA
x A
Ta lại có: nếu x μ (x) = sup 0 (x) 0 (x)
x A
x A; nghĩa là: μ A
Do đó theo mệnh đề 3
sup
[ 0 (x) (x)]=
sup
Suy ra
0 (x)
sup
x
xL
sup
xX
D(x)=
sup
0 (x)
x A
0 (x) điều cần chứng minh.
xA
99
sup
x A
0 (x)
Bây giờ ta hãy xét bài toán với X=Rn. định lý 2 dưới đây sẽ cho ta thấy có thể
đưa bài toán tối ưu mờ về bài toán tối ưu thông thường.
Định lý 2
0
Phương án x0 X là tối ưu khi và chỉ khi véc – tơ y=(x0, xn1 ) X x L
Trong đó
x
0
n 1
=
min ( x
i
0
) là lời giải của bài toán quy hoạch
i
max xn1
(P) xn1 i ( x)
x X
(i=0,1,…,m)
Chứng minh:
Ta có
(P)
max min
xX
sup
i[ 0 ,1,..., m ]
( 0 (x) 1 (x) ... m (x)) điều phải chứng mình.
xX
Ví dụ:
Bài toán kế hoạch mềm dẻo(flexible planning)
Nhiều bài toán kế hoạch được thể hiện bởi bài toán quy hoạch tuyến tính với
các ràng buộc
n
a
ij
x j bi (i=1,2,...,m)
j 1
Thông thường để cho bài toán ứng phó được với những biến động trong thực
tế, tức là để cho kế hoạch được mềm dẻo, người ta thay bi bởi một khoảng [αi ,βi] và
coi như x=(x1, x2,...,xn) là phương án chấp nhận được nếu:
n
a
ij
x j [ i , i ]
j 1
Bây giờ ta xét các tập mờ với các hàm thuộc
φi : Rn →L=[0,1] (i=1,2,...,m)
trong đó:
100
n
i aij x j
φi (x)=
j 1
i i
thì ta có bài toán quy hoạch mờ (Rn,D, L) với
D=( φ1 φ2 ... φm)
Tức là tìm
sup
=( φ1 φ2 ... φm) (x)
xR n
Theo định lý 2 ta có bài toán
max xn 1
n
(
)
x
aij x j
i
i
n 1
i
j 1
x R
n
(i=1,2,...,m)
Và cuối cùng ta đưa được bài toán “mềm dẻo” về dạng bài toán quy hoạch
thông thường.
4.4 Bài toán tối ưu mờ trong quản lý
Trong mục trên, ta sử dụng lý thuyết mờ làm công cụ nghiên cứu và xử lý các
bài toán điều khiển tối ưu mờ, đó là các bài toán mà thông tin về mục tiêu, về ràng
buộc và về đối tượng điều khiển là không đầy đủ, không chính xác hoặc không xác
định. Tuy nhiên trong khoa học quản lý và hẹp hơn, trong lý thuyết chọn quyết định
bài toán này được đặt ra một cách khác, tức là có một cách tiếp cận khác và do đó
có một giải pháp khác.
Bài toán được đặt ra là : Ký hiệu S là đối tượng quản lý, U= {u1, u2,..., um} tập
các giải pháp quản lý; Y={y1, y2, ...,yn} tập các trạng thái của S. Khi ta chọn giải
pháp quản lý ui nào đó (cũng là tác động điều khiển) ta cũng không thể khẳng định
được hệ S sẽ có trạng thái ra nào với xác suất tương ứng là bao nhiêu, nhưng biết
rằng nếu ta chọn giải pháp ui mà hệ S rơi vào trạng thái yj thì ta thu được một mức
hiệu quả là cij>0.
Bài toán đặt ra là phải lựa chọn giải pháp quản lý nào để có được mức hiệu quả
cao nhất với độ tin cậy cao nhất. Đây là bài toán tối ưu mờ, vì thông tin về đối
tượng quản lý là không đầy đủ, thông tin về mục tiêu cũng không rõ ràng. Đã có
nhiều công trình nghiên cứ và nêu lên những “tiêu chuẩn lựa chọn” khác nhau cho
bài toán này. Ta điểm qua các tiêu chuẩn đó.
101
Trường hợp 1:
Ta hoàn toàn không biết gì về mức độ chắc chắn (xác suất) hệ S sẽ rơi vào
trạng thái nào. Khi ấy có thể xử lý theo các cách sau đây:
a)Tiêu chuẩn Laplace
Coi xác suất để S rơi vào các trạng thái là như sau và bằng 1/n
Đặt ci=
1 n
cij (i=1, m )
n j 1
Ta sẽ chọn giải pháp quản lý ur nếu cr= max ci
i
b)Tiêu chuẩn Wald
Theo tiêu chuẩn này ta giả thiết rằng với mỗi giải pháp quản lý ui, hệ đều rơi
vào trạng thái ra “tồi tệ” nhất. Ta sẽ chọn cái tốt nhất trong số những “cái tồi tệ ”
đó. Cụ thể là:
Đặt hi= min cij (i= 1, m )
j
Giải pháp ur được chọn nếu hr = maxh i
i
c)Tiêu chuẩn Hurwicz
Ta chọn một số q (0,1)
ai= minc ij
j
và đặt:
bi= maxcij
j
ci= qai +(1-q)bi (i=1,...,m)
Giải pháp trung gian giữa cách chọn cái tốt nhất trong những cái tồi nhất và
chọn cái tồi nhất trong những cái tốt nhất. Khi q-1 thì ta có tiêu chuẩn Wald.
d)Tiêu chuẩn Savage
Ta lập một ma trận mới (aij)
Trong đó: aij= cij- maxc kj (i=1, m ), j= 1, n )
k
Và áp dụng tiêu chuẩn Wald cho ma trận này:
102
Đặt: ai= mina ij (i= 1, m )
j
Giải pháp ur sẽ được chọn nếu ar= maxai
Khó có thể nói rằng tiêu chuẩn nào hợp lý hơn tiêu chuẩn nào. Thông thường
người ta áp dụng tất cả các tiêu chuẩn; mỗi tiêu chuẩn chọn ra được một giải pháp.
Người ta cho rằng giải pháp nào hội tụ được nhiều tiêu chuẩn hơn, sẽ là “hợp lý
hơn”.
Trường hợp 2
Giả thiết rằng ta biết các xác xuất để S rơi vào trạng thái yj là pj>0 và
n
p c
j ij
(i= 1, m )
j 1
n
Ta đặt ci = p j cij (i= 1, m )
j 1
Giải pháp ur sẽ được chọn nếu cr = max ci
4.4.1 Bài toán tối ưu đa mục tiêu
Như đã biết một trong những đặc trưng của hệ thống lớn và phức tạp đó là tính
“đa mục tiêu”; do đó bài toán tối ưu trong hệ thống lớn thường là các bài toán “tối
ưu đa mục tiêu”; đó là tình huống mà ta phải cân nhắc nhiều mục tiêu cùng một lúc
khi lựa chọn phương án cuối cùng. Trong thực tế “hầu như không bao giờ” có một
phương án cuối cùng. Trong thực tế “hầu như không bao giờ” có một phương án tốt
nhất về mọi phương diện, nghĩa là về mọi mục tiêu nó đều tốt hơn tất cả các phương
án khác. Điều này dễ hiểu vì trong số các mục tiêu đề ra, có những mục tiêu tương
thích với nhau, nhưng cũng có những mục tiêu không tương thích với nhau, nghĩa là
sự tốt lên của mục tiêu này lại kéo theo sự tồi đi của mục tiêu khác.
Phương án tốt nhất về mọi phương diện, được gọi là “phương án lý tưởng”
phương án này không thuộc miền xác định của bài toán; tức là không có trong thực
tế. Người ta coi nó như 1 điểm trong không gian các hàm mục tiêu để từ đó quan sát
và ước lượng xem các phương án chấp nhận được của bài toán “gần” hay “xa” vị trí
này theo một ma trận nào đó .
Một cách khái quát bào toán tối ưu đa mục tiêu đặt ra như sau:
Cho F(x)=(f1(x), f2(x),..., fm(x)) xác định trên X Rn
103
Tìm x* X sao cho F(x*)=
min
F(x) hay F(x*)=
max
F(x)
xX
x X
4.4.2 Tìm tập Pareto
Giả sử fi(x)= xi (i=1,2,...,m) . D là tập compac và x0 D. Với mỗi x D ta đặt:
Dx = {y D:y x}
Và x *i =sup{xi: x D x }
0
Khi đó điểm x*=( x 1* ,.., x *n ) Rn gọi là điểm lý tưởng đối với xn. Nói chung
x* D sao cho:
1) x1 x0
2) x1 gần x* nhất có thể được
3) x1 là điểm Pareto của D.
0
Mức độ gần x* của x1 đo bởi hàm thuộc d xx* : Dx 0 →[0,1]
0
Với d xx* (x)= min
iI
xi xi0
xi* xi0
I x = {i: x 0i
Ta có định lý sau đây:
Định lý 1:
Nếu D là compac và lồi chặt; I x ={1,2,...,n}
0
0
0
Đồng thời x1 D là điểm thỏa mãn d xx* (x1)= sup d xx* (x) (1)
xD
Thì x1 là điểm pareto của D và x1 x0
Định lý 2:
Nếu D là compac và lồi thì thuật toán trên sẽ kết thúc sau một số hữu hạn
bước với x* k =xk (nghĩa là Ix k = Ø)
4.4.3 Xử lý tập Pareto
Giả xử ta đã tìm được tập Pareto. Theo nguyên lý Pareto ta sẽ chọn một điểm
Pareto nào đó thõa mãn thêm một số điều kiện phụ làm lời giải tối ưu của bài toán.
Phương pháp này gọi là phương pháp này gọi là phương pháp thỏa hiệp Pareto.
104
Một vài phương pháp thông dụng:
a)Thỏa hiệp dần từng bước
- Mỗi mục tiêu đề ra 1 mức tối thiểu nào đó: fi(x) f i (i=1.m )
Đặt P1={x P: xi f i ; i=1.m }
Nếu p1 Ø. Thuật toán kết thúc khi tập P được thu nhỏ dần đến một mức cho
phép nào đó.
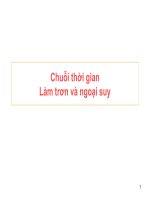
Trong ví dụ đã nêu ở trên , thu tục thường thấy có thể như sau:
A(a1,a2)
x2
x*
A1
B1
f2
f1
0
B(b1,b2)
x1
Hình 4.3: Thỏa hiệp dần từng bước
f1 =
1
(a1 + b1)
2
f2 =
1
(a2 + b2)
2
f1 và f 2 có ý nghĩa như một mức trung bình.
Sau bước này P1 là các điểm trên cung A1B1 và quá trình cứ thế tiếp diễn cho
đến khi nào cung AkBk < nào đó.
b)Tìm điểm gần lý tưởng nhất
Tức là tìm x P sao cho:
( x ,x*) (x,x*)
xP
Trong đó:
m
2 (x,x*)= ( xi xi* ) 2
i 1
105
Trong đó ví dụ trên thì x là điểm tiếp xúc giữa cung AB với đường tòn tâm
x*(với bán kính thích hợp)
x2
x*
A
x
B
0
x1
Hình 4.4: Điểm gần lý tưởng nhất
c)Phối hợp cả 2 phương pháp trên
Ban đầu người ta thỏa hiệp dần từng bước . Đến bước k ta tìm được tập tối ưu
Pareto Pk (đã được thu gọn sau k bước). Từ Pk ta tìm trên Pk một điểm gần điểm gần
điểm lý tưởng x*k và sau đó tìm trên Pk một điểm gần điểm lý tưởng x*k nhất; để
coi nó là phương án tối ưu của bài toán.
4.5 Tối ưu đa mục tiêu của một hệ phân cấp
Trong quản lý nền kinh tế quốc dân, ta thường gặp bài toán sau đây: Có một hệ
S gồm n phân hệ (cấp 1) S1, S2, ...,Sn. Hệ S và mỗi phân hệ đều có mục tiêu riêng
của mình. Hãy tìm một giải pháp ”quản lý tối ưu” cho tất cả các mục tiêu đó. Ví dụ
như cần phân phối 1 cách tối ưu một nguồn lực (tài nguyên hoặc tài chính) nào đó
cho các đối tượng trên: Đứng trên góc độ toàn bộ hệ thống S; cơ quan quản lý muốn
dự trữ một số nguồn lực “đủ an toàn” cho công tác quản lý của mình nghĩa là đủ để
ứng phó với những “tai biến” có thể xảy ra đối với toàn hệ thống, hoặc đủ để điều
chỉnh khi thấy có những bất hợp lý giữa các hệ con. Còn mỗi hệ con lại có mục tiêu
riêng của mình nên luôn có mong muốn có một nguồn lực tối đa có thể được. Vậy
giải pháp tối ưu là gì?
Trước hết cần thấy sự khác nhau cơ bản giữa bài toán này với bài toán đặt ra
trong mục 4.4. Trong lý thuyết quyết định bào toán trong mục 4.4 là bài toán có
“một chủ thể quyết định” và “đa mục tiêu” để so sánh và lựa chọn phương án. Sự
106
thỏa hiệp giữa các mục tiêu phụ thuộc vào nhận thức của chủ thể quyết định; tức là
phụ thuộc vào sự đánh giá tầm quan trọng của mỗi mục tiêu đến mức nào để lựa
chọn phương án, hoặc phụ thuộc vào chủ thể quyết định muốn gộp mục tiêu theo
cách nào hoặc muốn tìm giải pháp tối ưu theo phương pháp nào. Cho dù bài toán
được giải quyết theo cách nào thì quá trình giải quyết vẫn là “đơn giản” vì chỉ có
một chủ thể phân tích và đánh giá các phương án; tự chịu trách nhiệm về quyết định
mà mình lựa chọn và tự gánh chịu hậu quả nếu quyết định ấy là sai lầm.
Nói tóm lại, đó là một quá trình “tự làm, tự chịu”, không trách ai, không kêu
ai, và nếu thấy có sai lầm thì “tự sửa chữa” tức là “tự điều chỉnh”.
Còn bài toán đặt ra ở đây lại là “có nhiều chủ thể tham gia quyết định ” và mỗi
chủ thể có “một mục tiêu” riêng (cũng có thể có nhiều mục tiêu riêng). Cụ thể là các
hệ con đều có thể phát biểu ý kiến và đề nghị của mình để “cấp trên” xem xét khi
lựa chọn quyết định; đồng thời “cấp trên” không thể”tùy tiện” lựa chọn quyết định,
mà không cân nhắc xem “cấp dưới” có đồng ý hay chấp nhận quyết định đó hay
không. Điều đáng chú ý là giữa mục tiêu của các hệ con với mục tiêu của hệ lớn S
có nhiều khía cạnh tương hợp và những khía cạnh không tương hợp; nhưng giữa các
mục tiêu của các hệ con Si về cơ bản lại là “cạnh tranh Pareto” nghĩa là sự ưu tiên
đối với một vài hệ con Si nào đó lại kéo theo sự “giảm ưu tiên” đối với một số hệ
con khác. Như vậy có 2 vấn đề cần giải quyết:
- Một là xử lý mối quan hệ giữa các mục tiêu của các hệ con Si (i=1,2,...,n)
- Hai là xử lý mối quan hệ giữa mục tiêu của hệ lớn S và các hệ con
Si(i=1,...,n)
Nguyên tắc xử lý hai vấn đề này cơ bản là khác nhau. Đối với vấn đề thứ nhất,
mục tiêu cao nhất phải hướng vào sự cân bằng giữa các hệ con; giải pháp đó được
gọi là “tối ưu” thì ít nhất phải được mọi hệ con chấp nhận. Như vậy tính “tối ưu” ở
đây lại hướng vào sự cân bằng giữa các hệ con; coi đó là điều kiện cần không thể
thiếu được. Dưới đây ta xét một mô hình toán học trong lớp bài toán thuộc loại này.
4.6 Kết luận
Các bài toán điều khiển tối ưu là một lớp bài toán rất quan trọng trong lý
thuyết tối ưu hóa, bao gồm các bài toán rất phong phú về nội dung thực tế và rất đa
dạng về mô hình toán học. Trong chương bốn chỉ đề cập đến một vài dạng, có ý
nghĩa về toán học cũng như về quản lý, trong mỗi dạng cũng chỉ đề cập đến một bài
toán đơn giản nhất để giới thiệu mô hình toán học và ý tưởng của giải pháp. Đối với
những độc giả có cơ sở toán học vững vàng có thể tìm hiểu vấn đề một cách rộng
107
hơn và sâu hơn qua các tài liệu dẫn. Đối với những độc giả quan tâm nhiều đến
những khả năng và các khía cạnh có thể ứng dụng trong thực tiễn quản lý thì có thể
không cần đi sâu vào những công thức và các phép biến đổi toán học mà nên tìm
hiểu về cách đặt vấn đề và ý tưởng của giải pháp.
4.6.1 Về bài toán cỡ lớn và nhiều bước
Khối lượng tính toán của bài toán này rất lớn, người ta tìm cách phân chia
thành những bài toán nhỏ. Trong phương pháp quy hoạch động, người ta phân chia
một bài toán cực trị n biến thành n bài toán cực trị một biến để cho việc giải bài toán
được dễ dàng hơn. Còn ở đây người ta phân chia một bài toán cỡ lớn n bước thành n
bài toán cỡ nhỏ một bước để dễ giải hơn.
Trong thực tế quản lý, bài toán này rất hay gặp. Khi đó nên làm những việc sau
đây:
- Suy nghĩ xem cần phải làm những việc gì trước: tức là đặt bài toán cho trước
1.
- Suy nghĩ xem cách thức tiến hành các việc ấy như thế nào tức là tìm giải
pháp cho các vấn đề được đặt ra.
- Giao các việc đó cho các cán bộ hoặc các bộ phận thực hiện và suy nghĩ tiếp
về các công việc của bước sau.
Khoa học quản lý khuyến khích các cán bộ quản lý giao (càng nhiều càng tốt)
công việc cho người khác và hướng dẫn họ cách thức tiến hành công việc như thế
nào và dành nhiều thời gian cho các “khâu yếu” và phổi hợp các bộ phận để công
việc của họ được tiến hành đồng bộ, tránh khuynh hướng ôm hết việc về mình và
lúc nào cũng tất bật, vất vả hoặc giao việc cho người khác mà không hướng dẫn
cách thức tiến hành công việc để họ luôn luôn phụ thuộc vào mình (để tỏ ra mình là
quan trọng). Đó là căn bệnh “ấu trĩ” của quản lý .
4.6.2 Về bài toán tối ưu mờ
Không đầy đủ thông tin, thông tin không xác định, thông tin không chắc chắn,
các tình huống thường gặp trong thực tế. Cần cố gắng bằng mọi cách làm “rõ hóa”
vấn đề cần giải quyết, tức là cố gắng cải thiện và nâng cao chất lượng của hệ thống
thông tin quản lý. Cố gắng phân tích và đánh giá vấn đề theo nhiều cách khác nhau
và tìm những khía cạnh tương hợp trong các phương pháp khác nhau đó. Khi lựa
chọn quyết định cần chú ý nhiều hơn nữa đến những giải pháp mà hiệu quả có thể
kém hơn chút ít, nhưng chắc chắn, an toàn và ít hoặc không rủi ro. Không nên mạo
108
hiểm hoặc “cá cược” vào những giải pháp có hiệu quả cao hơn nhưng đầy bất trắc
và hiểm họa lúc nào cũng có thể xảy ra.
4.6.3 Về bài toán tối ưu đa mục tiêu
Cân bằng lợi ích (mục tiêu) giữa các bộ phận là nguyên tắc để đảm bảo cân
bằng nội của toàn hệ thống. Hy sinh lợi ích bộ phận cho lợi ích toàn hệ thống chỉ
nên đặt ra trong những tình huống thật cấp bách, trên một vài vấn đề cụ thể nào đó
và chỉ nên làm trong một thời gian ngắn (thường là trong thời gian có chiến
tranh).“Cân bằng” hay “thỏa hiệp” thực chất là dùng “cái lớn, cái chung, cái tổng
thể” để ràng buộc khống chế “cái riêng, cái lẻ”. ‘Sự ràng buộc và khống chế đó”
thực chất là “vấn đề cưỡng bức (forcing problem) mà đó lại là một nội dung cơ bản
của quản lý: Không có cưỡng bức thì không có hệ thống, không có hệ thống thì
không có quản lý. Nói một cách có ấn tượng thì quản lý là “nghệ thuật cưỡng bức”.
Nếu mọi hệ con chấp nhận sự “cưỡng bức” của hệ lớn một cách tự nguyện thì đó là
biểu hiện sự thành công của quản lý.
Trường hợp ngược lại, tức là các hệ con đều cảm thấy “quá thiệt thòi” và “bị
áp đặt”, thì đối tượng quản lý dần dần trở thành “hệ thống bị cưỡng bức”(forced
system); các hệ con tìm cách đối phó với cấp trên, tuy bên ngoài vẫn tỏ ra tuân thủ
cấp trên và toàn bộ hệ thống dần dần trở thành một “giả hệ thống”(pseudosystem).
Khi đó xuất hiện nguy cơ khủng hoảng làm tan rã hệ thống lớn.
Thực tế cho thấy sau chiến tranh, các nước “chiến bại” lại mau chóng ổn định
và phát triển với tốc độ nhanh hơn so với các nước “chiến thắng” trong cuộc chiến.
Bên cạnh những nguyên nhân như người ta say sưa với vinh quang chiến thắng mà
quên mất một điều: các nước chiến thắng cũng như các nước chiến bại đều trải qua
một cuộc khủng hoảng; còn có một nguyên nhân rất cơ bản đó là một số chế độ
quản lý được chấp nhận trong chiến tranh đã trở thành không chấp nhận được trong
thời kỳ hậu chiến. Các chế độ này chậm sửa đổi làm cho hệ thống trở thành “bị
cưỡng bức” và dần dần trở thành “giả hệ thống” ở những mức độ khác nhau. Thời
cơ và thuận lợi do chiến thắng đem lại (nhất là về tinh thần) dần dần tan biến, cơ
quan quản lý lại phải đối mặt với nguy cơ khủng hoảng mới.
Có những nước khó khăn lắm mới vượt qua được thử thách này, nhưng cũng
có những nước phải chấp nhận một kết cục cay đắng: trở thành kẻ “chiến bại” trong
cuộc “tự chiến với mình”. Đó là bài học quý báu và đắt giá cho các nhà quản lý.
109
Chương 5
TỔ CHỨC XÂY DỰNG VÀ QUẢN LÝ HỆ THỐNG KINH TẾ
5.1 Khái niệm về quản lý hệ thống
Quản lý (nói chung) là sự tác động của chủ thể quản lý lên đối tượng quản lý
nhằm đạt được những mục tiêu nhất định trong điều kiện biến động của môi trường.
Ví dụ:
Bảng 5.1 Quản lý
Chủ thể
quản lý
Đối
tượng
quản lý
Mục tiêu
cần đạt được
Môi trường (có thể biến động)
Quản lý sản xuất trong một nhà máy
- Tăng năng
Ban giám
- Cán bộ.
đốc(đứng
đầu là
Giám đốc)
- Công nhân suất lao động
- Nhân viên - Hạ giá
thành sản
phẩm
- Điều kiện làm việc trong nhà máy.
- Điều kiện sinh hoạt, đi lại trong
thành phố.
- Tình hình chính trị, xã hội của nhà
nước
Quy ra các
- Ảnh hưởng của thế giới – Ảnh
chỉ tiêu con số hưởng của tự nhiên, khí hậu.
cụ thể
Quản lý học tập trong trường học
Ban giám
hiệu(đứng
đầu là hiệu
trưởng)
- Giáo
viên
- Dạy tốt
- Điều kiện dạy, học trong trường.
- Học
- Điều kiện sinh hoạt, đi lại trong
- Sinh viên tốt(Quy ra các thành phố tình hình chính trị, xã hội
chỉ tiêu, con
của nhà nước.
số cụ thể)
- Ảnh hưởng của thế giới
- Ảnh hưởng của tự nhiên, khí hậu.
Theo bách khoa toàn thư Việt Nam, quản lý là chức năng và hoạt động của hệ
thống có tổ chức thuộc các lĩnh vực khác nhau (sinh học, kĩ thuật, xã hội), bảo đảm
110
giữ gìn một cơ cấu ổn định nhất định, duy trì sự hoạt động tối ưu và đảm bảo thực
hiện những chương trình và mục tiêu của hệ thống đó.
Quản lý là một khoa học, dựa trên cơ sở vận dụng các quy luật phát triển của
các đối tượng khác nhau, quy luật tự nhiên hay xã hội. Đồng thời, quản lý còn là
một nghệ thuật, đòi hỏi nhiều kiến thức xã hội, tự nhiên, hay kĩ thuật,… Những hình
thức quản lý có ý thức luôn gắn liền với hoạt động có mục tiêu, có kế hoạch của
những tập thể lớn hay nhỏ của con người và được thực hiện qua những thể chế xã
hội đặc biệt.
5.1.1 Đặc điểm chung nhất của các hệ thống quản lý
- Có chủ thể quản lý và đối tượng quản lý.
Đối tượng quản
lý
Chủ thể quản lý
Hình 5.5: Hệ thống quản lý
+ Chủ thể quản lý: tạo ra tác động quản lý.
+ Đối tượng quản lý: tiếp nhận các tác động của chủ thể và đối tượng quản lý.
Có sự trao đổi thông tin nhiều chiều. Chủ thể quản lý phải thu nhận thông tin
từ nhiều nguồn khác nhau.
Tính linh hoạt, thích nghi, điều chỉnh, đổi mới của chủ thế quản lý. Môi trường
quản lý luôn biến động.
Kết luận: Quản lý là một tiến trình năng động
5.1.2 Quy trình quản lý
Quy trình quản lý là quá trình hoạt động của các chủ thể quản lý tập hợp thành
một cơ chế được quy định theo một trình tự logic nhất định, nhằm đạt được những
mục tiêu quản lý đã được đề ra bằng cách thực hiện những chức năng quản lý nhất
định, tuân thủ theo những nguyên tắc quản lý và vận dụng những phương pháp quản
111