Về một phương pháp đánh giá thích nghi tín hiệu sinuoid. pot
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (304.46 KB, 4 trang )
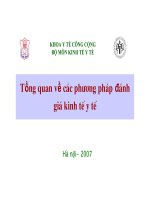
Â(t+1)
f(e(t))
Â(t)
â(t)
+
ŝ(t)
cos
1
(t)
+
s(t)
d (t) = s(t) + v(t)
v (t)
f(∙)
e(t)
bˆ(t)
sin
1
(t)
Z
-1
Â(t+1) = Â(t) + X(t) f(e(t))
Â(t+1)
f(e(t))
Â(t)
â(t)
+
ŝ(t)
cos
1
(t)
+
s(t)
d (t) = s(t) + v(t)
v (t)
f(∙)
e(t)
bˆ(t)
sin
1
(t)
Z
-1
Â(t+1) = Â(t) + X(t) f(e(t))
sign[e(t)]
-
+
i
(t)
F(t)
Â
p
(t)
e(t)
ŝ
p
(t)
ŝ
1
(t)
-
+
b
p
(t)
â
1
(t)
b
1
(t)
â
p
(t)
Â
p
(t+1) = Â
p
(t) + F(t)(Â
p
(t) - Â
p
(t-1)) + UX(t) sign[e(t)]
Z
-1
Â
p
(t+1)
d(t) = s(t) + v(t)
sin
1
(t)
sin
p
(t)
cos
1
(t)
cos
p
(t)
sign[e(t)]
-
+
-
+
i
(t)
F(t)
Â
p
(t)
e(t)
ŝ
p
(t)
ŝ
1
(t)
-
+
-
+
b
p
(t)
â
1
(t)
b
1
(t)
â
p
(t)
Â
p
(t+1) = Â
p
(t) + F(t)(Â
p
(t) - Â
p
(t-1)) + UX(t) sign[e(t)]
Z
-1
Â
p
(t+1)
d(t) = s(t) + v(t)
sin
1
(t)
sin
p
(t)
cos
1
(t)
cos
p
(t)