nguyên tắc cơ bản xây dựng hệ điều chỉnh tự động truyền động điện
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (263.21 KB, 24 trang )
TH- HTĐC
Chơng1:
Những nguyên tắc cơ bản khi xây dựng hệ điều chỉnh tự
động truyền động điện
1.1.Khái niệm và phân loại
1.1.1.Cấu trúc chung của hệ thống điều chỉnh tự động TĐĐ
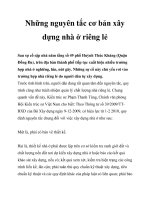
Sơ đồ cấu trúc gồm:
Phần lực: động cơ truyền động quay máy sản xuất (MSX), Bộ biến đổi năng
lợng BBĐ (chỉnh lu, ĐAXC, ĐAMC, biến tần)
Phấn điều khiển: Các thiết bị đo lờng ĐL( nh biến dòng, máy phát tốc ),
Bộ điều chỉnh R.
Tín hiệu điều khiển hệ thống gọi là tín hiệu đặt, ngoài ra còn có các tín hiệu nhiễu
loạn ( nh mômen cản ).
Hoạt động của hệ thống có thể đợc mô tả nh sau:
Tín hiệu điều khiển đợc lấy ra từ bộ điều chỉnh R. Các bộ điều chỉnh R nhận tín hiệu
thông báo sai lệch về trạng thái làm việc của truyền động thông qua so sánh tín hiệu
đặt và tín hiệu đo lờng các đại lợng truyền động. Tín hiệu sai lệch này qua bộ điều
chỉnh đợc khuếch đại và tạo hàm chức năng điều khiển sao cho đảm bảo chất lợng
động và tĩnh của hệ thốngtruyền động.
1.1.2 Phân loại.
- Phân loại theo động cơ có hệ TĐ một chiều, hệ TĐ xoay chiều
- Phân loại theo tín hiệu điều chỉnh có bộ điều chỉnh tơng tự và bộ điều chỉnh số.
- Phân loại theo thuật toán điều chỉnh có hệ TĐ thích nghi, hệTĐ điều chỉnh
vectơ.
1 2.Những vấn đề chung khi thiết kế hệ điều chỉnh tự động TĐĐ.
Khi thiết kế hệ điều chỉnh tự động TĐĐ cần phải đảm bảo hệ thực hiện đợc tất cả
các yêu cầu đặt ra, đó là các yêu cầu về công nghệ, các chỉ tiêu chất lợng và yêu cầu về
kinh tế. Chất lợng của hệ thống đợc thể hiện trong trạng thái động và tĩnh. Trạng thái
tĩnh yêu cầu quan trọng nhất là độ chính xác điều chỉnh. Đối với trạng thái động có các
yêu cầu về ổn định và các chỉ tiêu về chất lợng động là độ quá điều chỉnh, tốc độ điều
chỉnh, thời gian điều chỉnh và số lần giao động.
1.3. Độ chính xác của hệ thống TĐĐ tự động trong chế độ xác lập và tựa xác lập.
Nguyên Đăng Toàn
1
BBĐ Đ/cơ MSX
ĐL
T/h đặt
T/h
phản hồi
Hình1-1: Sơ đồ cấu trúc chung của hệ điều chỉnh tự động
NL
R
TH- HTĐC
Độ chính xác đợc đánh giá trên cơ sở phân tích các sai lệch điều chỉnh, các sai
lệch này phụ thuộc rất nhiều yếu tố nh sự biến thiên của tín hiệu đặt, ma sát tĩnh, sự
trôi điểm không, sự già hoá v.v
1.3.1. Các hệ số sai lệch
Xét một hệ thống tự động điều chỉnh có cấu trúc
Trong đó: F
0
(p): Hàm truyền mạch hở
R, r(t): tín hiệu điều khiển
C, c(t): tín hiệu ra
N
i
: Các nhiễu loạn
C(p) =
=
+
n
1i
ii
pNpFpRpF )().()().(
)(
)(
)(
pF1
pF
pF
0
0
+
=
F
i
(p) : hàm truyền đối với các nhiễu loạn
Các thành phần quá độ của C(t) phụ thuộc vào đặc tính của mạch vòng điều chỉnh và
vào tín hiệu điều khiển.
Xẻt R(t) và N
i
(t) thoả mãn điều kiện Mc.Laurin thì sai lệch e(t)= R(t)- C(t) có thể viết
i
n
i
iNn
n
Nn1nNn0
i
1
i
1iN
1
1N111N0
i
i
i
2
2
210
dt
tNd
C
dt
tdN
CtNC
dt
tNd
C
dt
tdN
CtNC
dt
tRd
C
dt
tRd
C
dt
tdR
CtRCte
)(
)(
)(
)(
)(
)(
)(
)()(
)()(
++++
+
+++++
+++++=
C
i
: gọi là hệ số sai lệch, trong kỹ thuật tự động thờng đặt tên cho các hệ số sai lệch
C
0
: hệ số sai lệch vị trí
C
1
: hệ số sai lệch tốc độ
C
2
: hệ số sai lệch gia tốc
Một hệ thống chính xác tuyệt đối là tất cả hệ số sai lệch bằng không
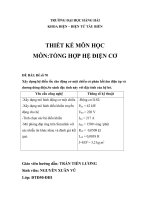
Từ sơ đồ cấu trúc ở trên ta viết hàm truyền của hệ thống theo sai lệch
Nguyên Đăng Toàn
2
F
0
(p)
R e
-
C
N
1
N
p
e(t)
C(t)
R(t)
t
H1-3a: Sơ đồ khối
H1-3b: Các đặc tính quá độ
TH- HTĐC
)(
)(
)()(
)(
)(
pN
pM
pF1
1
pR
pE
tF
0
e
=
+
==
Chia đa thức M(p) cho đa thức N(p) ta đợc
i
i
2
210e
pCpCpCCpF ++++= )(
Từ đó suy ra cách tính các hệ số sai lệh điều chỉnh
{ }
[ ]
[ ]
)))(((lim
))((lim
))((lim
)(lim
=
=
=
=
=
1i
0k
k
ke
i
0p
i
10e
2
0p
2
0e
0p
1
e
0p
0
pCpF
p
1
C
pCCpF
p
1
C
CpF
p
1
C
pFC
Cũng có thể tính đợc các hệ số sai lệch đối với tín hiệu điều khiển nhờ hàm truyền của
hệ thống theo tín hiệu điều khiển
)(
)(
)()(
)(
)(
)(
)(
)(
)(
pF1
PR
pCpR
pF
pF1
pF
pR
pC
pF
e
0
0
=
=
+
==
Có thể viết hàm truyền đạt ở dạng tỷ số đa thức
n
n
2
21
m
m
2
210
papapa1
pbpbpbb
pF
++++
++++
=
)(
Sử dụng công thức tính ở trên ta sẽ tìm đợc các hệ số sai lệch nh sau
C
0
= 1-b
0
C
1
= a
1
- C
0
a
1
- b
1
C
2
= a
2
- C
1
a
1
- C
0
a
2
b
2
C
i
= a
i
- C
0
a
i
b
i
-
=
1i
1y
yiy
ac
Ví dụ áp dụng:
a. hệ thống hữu sai- hệ bậc không
Hàm truyền của hệ điều chỉnh tổng có dạng tổng quát
)(
)(
)(
pT1
pT1K
pF
k
n
1k
i
m
1i
0
+
+
=
=
=
Nếu giả thiết hệ thông có phản hồi đơn vị thì hàm truyền của hệ kín
Nguyên Đăng Toàn
3
TH- HTĐC
)(
)(
)(
)(
)(
+++
+++
+
=
+
==
2
21
2
21
0
0
papa1
pbpb
K1
K
pF1
pF
pR
pC
pF
Hệ số sai lệch vị trí:
C
0
= 1-
K1
1
K1
K
+
=
+
Khi tăng hệ số khuếch đại tổng thì sai lệch tĩnh giảm khi tín hiệu điều khiển là hằng số.
Nừu tín hiệu điều khiển biến đổi theo thời gian thì sai lệch sẽ tăng theo thời gian
b. Hệ thống vô sai cấp một- hệ bậc một
Hàm truyền của hệ thống hở có dạng
) )((
) )((
)(
''
pT1pT1p
pT1pT1K
pF
21
21v
0
++
++
=
Tơng ứng có hàm truyền của hệ thống kín
++++
+++
=
)(
)(
)(
'
'
2
2i
v
2
2i
papT
K
1
1
pbpT1
pF
Hệ số sai lệch vị trí C
0
= 1-1 = 0
Sai lệch của hệ thống không phụ thuộc vào độ lớn của tín hiệu điều khiển mà phụ
thuộc vào các đạo hàm của nó. Thí dụ sai lệch tốc độ là
C
1
= a
1
b
1
=
v
K
1
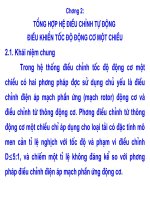
c. Hệ thống vô sai cấp hai- hệ bậc 2
Nguyên Đăng Toàn
4
R(t)=kt
t
H1-3: Đáp ứng của hệ hữu sai với các
tín hiệu vào khác nhau
R(t)= const
e(t)=C
0
kt+C
1
k
C(t)
C(t)
t
e
=
R(t)=kt
t
H1-4: Đáp ứng của hệvô sai cấp 1 với
các tín hiệu vào khác nhau
R(t)= const
C(t)
C(t)
t
e
=0
e
=
R(t)=
0
+ kt+k
2
t
2
t
C(t)
e(t) =
TH- HTĐC
Hàm truyền có hàm truyền
) )((
) )((
)(
''
pT1pT1p
pT1pT1K
pF
21
2
21v
0
++
++
=
hàm truyền của hệ kín tơng ứng với phản hồi đơn vị
3
3
2
i
a
i
3
3
2
iii
papT
K
1
pT1
pbpTTpT1
pF
)()(
)()(
)(
''
''
+++++
++++
=
Các hệ số sai lệch:
C
0
= a
0
b
0
= 0
C
1
= a
1
b
1
= 0
C
2
= a
2
b
2
=
a
K
1
Khi hệ thống ổn định thì sai lệch chỉ phụ thuộc vào các đạo hàm từ cấp 2 trở lên của tín
hiệu vào.
1.3.2. Tiêu chuẩn sa lệch
a. Tiêu chuẩn tích phân bình phơng sai lệch (ISE)
Theo tiêu chuẩn ISE, chất lợng của hệ thống đợc
đánh giá bởi tích phân sau đây:
0
2
dt)t(e
Có thể thay thế cận trên không xác định bằng
thời gian hữu hạn T đủ lớn sao cho t > T thì e(t) đủ nhỏ
đến mức có thể bỏ qua. Hệ thống tối u là hệ thống
làm cho tích phân này cực tiểu
Tiêu chuẩn ISE đánh giá các sai lệch lớn rất nặng và
đánh giá các sai lệch nhỏ rất nhẹ. Một hệ thống thiết
kế theo tiêu chuẩn ISE làm cho các sai lệch lớn ban đầu
giảm rất nhanh, do đó có tốc độ đáp ứng phải rất nhanh
và kết quả là hệ kém ổn định
VD:
Nguyên Đăng Toàn
5
e
=
v
K
k
R(t)=kt
t
H1-5: Đáp ứng của hệvô sai cấp 2 với
các tín hiệu vào khác nhau
C(t)
e
=0
R(t)=
0
+ kt+k
2
t
2
t
C(t)
e
=
R(t)
C(t)
t
t
t
t
e(t)
e
2
(t)
T
0
2
dt)t(e
H1-6: Mô tả quá trìn htính
tích phân ISE
TH- HTĐC
b. Tiêu chuẩn tích phân của tích số giữa thời gian và giá trị tuyệt đối của sai lệch
(ITAE)
Theo tiêu chuẩn ITAE, hệ thống tự động điều chỉnh là tối u nếu nó làm cực tiểu tích
phân sau
0
dttet )(.
Tiêu chuẩn ITAE đánh giá nhẹ các sai lệch lớn ban đầu, còn các sai lệch sau xuất hiện
trong cả quá trình quá độ thì bị đánh giá rất nặng. Hệ thống đợc thiết kế theo tiêu
chuẩn này sẽ cho đáp ứng có độ quá điều chỉnh nhỏ và có khả năng làm suy giảm
nhanh các dao động trong quá trình điều chỉnh
1.4. Tổng hợp các mạch vòng điều chỉnh kiểu nối cấp dùng phơng pháp hàm chuẩn
môđun tối u.
Khi tổng hợp các hệ truyền động nhiều thông số thờng phân hệ thành cấu trúc
nhiều vòng có các bộ điều chỉnh ( regulator) nối theo cấp.
`
1.4.1. Một số chú ý cơ bản trớc khi tổng hợp mạch vòng nối cấp
Ưu thế của cấu trúc nối cấp các bộ điều chỉnh là giá đặt của mỗi vòng điều
chỉnh lại đợc hạn chế bởi đoạn bão hoà trên đặc tính của bộ điều chỉnh ở vòng điều
chỉnh bên ngoài liền kề
Mỗi vòng điều chỉnh có một bộ điều chỉnh và hệ thống điều chỉnh bao gồm đối
tợng điều chỉnh S
0
và mạch vòng phụ.
Thông thờng ở các đối tợng điều chỉnh S
0
có chứa những khâu có hằng số thời
gian lớn. Do đó để dẫn ra phơng pháp, ta giả thiết rằng các mạch điều chỉnh của mỗi
đại lợng chứa một phần có hằng số thời gian lớn ( thí dụ nh hằng số thời gian điện cơ,
hằng số thời gian của cuộn kích từ.v.v ) và một phần chứa hằng số thời gian nhỏ ( thí
dụ hằng số thời gian của sensor, của mạch điều khiển thyristor. v.v ).
Trong trờng hợp chung hàm truyền của đối tợng có dạng.
)().(
)(.
)(
pT1pT1p
epT1K
pS
s
u
1s
k
v
1k
i
pT
j
m
1j
0
d
++
+
=
==
=
trong đó: T
d
là hằng số thời gian của khâu trễ, trong hàm truyền có thể chứa khâu bậc
hai.
Nguyên tắc tổng hợp các bộ điều chỉnh sẽ đợc tiến hành sao cho bù đợc các
khâu có hằng số thời gian tơng đối lớn T
k
, bằng cách đó ta sẽ giảm cấp cho mạch hở,
các khâu có hằng số thời gian tơng đối nhỏ T
s
sẽ không đợc bù.
Nguyên Đăng Toàn
6
R
2
(p)
S
02
(p)S
01
(p)
R
1
(p)
S
0n
(p)
R
n
(p)
X
nđ
X
2đ
X
1đ
X
2
X
1
X
n
P
1
P
2
P
n
-
-
-
H1-7: Hệ truyền động có các bộ điều chỉnh nối theo cấp
TH- HTĐC
Trong kỹ thuật truyền động điện có thể bỏ qua các hằng số thời gian nhỏ hơn 1
miligiây, các hằng số thời gian cỡ dới vài chục miligiây có thể coi là nhỏ (T
s
), các hằng
số thời gian cỡ 0,1 giây trở lên có thể coi là lớn (T
k
)
Việc tổng hợp các bộ điều chỉnh đợc thực hiện theo từng mạch vòng, từ vòng
đầu tiên đến mạch vòng thứ n
Thực chất của việc tổng hợp bộ điều chỉnh là đi tìm cấu trúc và bộ tham số tối u
cho bộ điều chỉnh theo một tiêu chuẩn nào đó để đạt đợc chất lợng cho hệ thống điều
khiển
1.4.2. áp dụng các tiêu chuẩn tối u để tổng hợp thông số
1.4.2.1. áp dụng tiêu chuẩn môdun tối u
Nội dung tiêu chuẩn:
- ở hệ thống kín, khi tần số tiến đến vô hạn thì môđun của đặc tính tần số biên
độ phải tiến đến không. Vì thế ở dải tần thấp nhất, hàm truyền phải đạt đợc điều
kiện
1jF =)(
- Hàm chuẩn theo tiêu chuẩn môđun tối u
22
MC
p2p21
1
pF
++
=)(
- Đặc tính tần và đặc tính quá độ của hàm chuẩn
- Tiêu chuẩn môđun tối u hiệu chỉnh lại đặc tính tần số ở vùng tần số thấp và
trung bình, không đảm bảo trớc tính ổn định của hệ thống. Do đó sau khi áp
dụng cần phải kiểm tra sự ổn định của hệ thống.
Ví dụ áp dụng:
1. Đối tợng điều chỉnh là hệ hữu sai có hàm truyền
Nguyên Đăng Toàn
7
2%
H1-8: a)Đặc tính tần; b)Đặc tính quá độ
t
4,3%
1
X(t)
4,7
8,4
F(j)
0
a)
b)
TH- HTĐC
))((
)(
pT1pT1
K
pS
21
1
0
++
=
Với T
1
> T
2
Tìm bộ điều chỉnh R(p) theo tiêu chuẩn môđun tối u
Giải
Ta có sơ đồ cấu trúc
Từ sơ đồ cấu trúc ta tính đợc hàm truyền hệ kín
)().(
)().(
)(
pSpR1
pSpR
pF
0
0
+
=
Để hệ thống đạt tiêu chuẩn môđun tối u thì F(p) = F
MC
(p)
[ ]
)()(
)(
)()(
)().(
)().(
)(
pF1pS
pF
pRpF
pSpR1
pSpR
pF
MC0
MC
MC
0
0
==
+
=
Thay hàm truyền của S
0
(p) và F
MC
(p) vào ta có
)(.
))((
)().(
)(
p1p2K
PT1pT1
p1p2pS
1
pR
1
21
0
+
++
=
+
=
Vì T
1
là hằng số thời gian nhỏ nên chọn
= T
1
, do đó ta sẽ tìm đợc bộ điều chỉnh
pTK
pT1
pR
11
2
+
=)(
Có cấu trúc của bộ PI ( tỷ lệ - tích phân)
Và hàm truyền của hệ kín thu đợc
22
11
pT2pT21
1
pF
++
=)(
2. Đối tợng điều chỉnh là hệ có hàm truyền
)(
)(
'
pT1
K
pS
s
u
1s
0
+
=
=
Với T
s
toàn là hằng số thời gian nhỏ
Giải
Vì T
s
toàn là hằng số thời gian nhỏ nên thay thế
pT1
K
pT1
K
pS
s
s
u
1s
0
+
=
+
=
=
)(
)(
'
với
=
=
u
1s
ss
TT
'
là tổng hằng số thời gian nhỏ
Tiến hành làm nh ví dụ 1 ta tìm đợc cấu trúc và tham số của bộ điều chỉnh
pKT2
1
pR
s
=)(
có cấu trúc của bộ điều chỉnh tích phân
3. Đối tợng điều chỉnh có hàm truyền
Nguyên Đăng Toàn
8
R(p)
S
0
(p)
X
đ
X
-
H1-9: Cấu trúc hệ
TH- HTĐC
)().(
)(
'
pT1pT1
K
pS
s
u
1s
k
2
1k
0
++
=
==
Tơng tự ta tìm đợc cấu trúc và tham số của bộ điều chỉnh
pT2
1
K
pT1
pR
s
k
2
1k
.
)(
)(
+
=
=
có cấu trúc là bộ PID ( tỷ lệ- tích phân vi phân)
4. Đối tợng điều chỉnh có hàm truyền
s
s
u
1s
0
KT2
1
pR
pT1p
K
pS =
+
=
=
)(
)(
)(
'
Cấu trúc tỷ lệ
5. Đối tợng điều chỉnh có hàm truyền
s
s
u
1s
0
KT2
Tp1
pR
pT1Tp1p
K
pS
+
=
++
=
=
)(
)()(
)(
'
Cấu trúc tỷ lệ- vi phân
Nhận xét: Cấu trúc và tham số của bộ điều chỉnh phụ thuộc vào hàm truyền của đối t-
ợng điều chỉnh S
0
(p)
1.4.2.1. áp dụng tiêu tối u đối xứng
Nội dung tiêu chuẩn:
- Tiêu chuẩn tối u đối xứng thờng áp dụng để tổng hợp các bộ điều chỉnh trong
mạch có yêu cầu vô sai cấp cao
- Hàm chuẩn tối u đối xứng có dạng
3322
DX
p8p8p41
p41
pF
+++
+
=)(
- Đặc tính quá độ
Ví dụ áp dụng:
1. Đối tợng điều chỉnh có hàm truyền
)(
)(
s1
1
0
pT1pT
K
pS
+
=
với T
s
là tổng thời gian nhỏ
Giải
Nguyên Đăng Toàn
9
2%
H1-10:Đặc tính quá độ
t
43,4%
1
X(t)
3,1
16,5
TH- HTĐC
Ta có sơ đồ cấu trúc
Từ sơ đồ cấu trúc ta tính đợc hàm truyền hệ kín
)().(
)().(
)(
pSpR1
pSpR
pF
0
0
+
=
Để hệ thống đạt tiêu chuẩn môđun tối u thì F(p) = F
ĐX
(p)
[ ]
)()(
)(
)()(
)().(
)().(
)(
pF1pS
pF
pRpF
pSpR1
pSpR
pF
DX0
DX
DX
0
0
==
+
=
Thay hàm truyền của S
0
(p) và F
MC
(p) vào ta có
)(.
))((
)().(
)(
p1p8K
p41PT1pT
p1p8pS
p41
pR
22
1
s1
22
0
+
++
=
+
+
=
Vì T
s
là hằng số thời gian nhỏ nên chọn
= T
s
, do đó ta sẽ tìm đợc bộ điều chỉnh
p
T
TK8
pT41
pR
1
2
s1
s
+
=)(
Có cấu trúc của bộ PI ( tỷ lệ - tích phân)
Và hàm truyền của hệ kín thu đợc
33
s
22
ss
s
pT8pT8pT41
pT41
pF
+++
+
=)(
2. Đối tợng điều chỉnh có hàm truyền
p
T
TK8
pT1pT41
pRpR
pT1pT1pT
K
pS
1
2
s1
2s
s21
1
0
))((
)()(
))((
)(
++
==
++
=
Chú ý:
Ta thấy tử số của hàm chuẩn tối u đối xứng có thành phần đạo hàm, chính vì thế mà độ
quá điều chỉnh của đặc tính quá độ rất lớn ( 43,4%). Vì vậy thờng thêm một khâu quán
tính với hằng số thời gian là 4T
s
thì độ quá điều chỉnh còn 8,1%
Nguyên Đăng Toàn
10
R(p)
S
0
(p)
X
đ
X
-
H1-9: Cấu trúc hệ
2%
H1-10:Đặc tính quá độ
t
43,4%
1
X(t)
3,1
16,5
8,1%
13,3
7,8
TH- HTĐC
Chơng 2:
Một số phần tử tự động trong hệ điều chỉnh tự động
truyền động điện
2.1. Khuếch đại thuật toán
Khuếch đại thuật toán là phần tử cơ bản để xây dựng mạch điều khiển tơng tự.
Nhờ mạch khuếch đại thuật toán mà ta có thể tạo đợc các thuật toán điều khiển khác
nhau.
`Ký hiệu khuếch đại thuật toán
Tính chất và tham số cơ bản của KĐTT
1. Hệ số khuếch đại điện áp A = ( thực tế A = 5.10
4
)
2. Trở kháng vào Z
v
= ( Z
v
1M )
3. Trở kháng ra Z
r
= 0 ( Z
r
= 100)
4. Giải tần 0 ữ
5. Độ trôi điêm không bằng không
6. Tuyến tính và đối xứng
2.2.Các mạch cơ bản dùng khuếch đại thuật toán
2.2.1.Mạch cộng tín hiệu
Công thức tính tín hiệu đầu ra
) (
n1
n1
b1
b1
a1
a1
22
R
U
R
U
R
U
RU +++=
Nếu ta chọn R
1a
= R
1b
= = R
1n
= R
2
thì ta cộng các tín hiệu điện áp
U
2
= -(U
1a
+ U
1b
+ + U
1n
)
2.2.2. Mạch lặp điện áp
Mạch lặp hay dùng để lặp các tín hiệu
điều khiển ( trớc đầu vào của mạch so sánh
trong mạch mạch điều khiển chỉnh lu)
Nguyên Đăng Toàn
11
+
-
H2.2: Sơ đồ nguyên lý
U
1a
U
1b
U
1n
R
1a
R
1n
R
2
U
2
+
-
-
+
Đầu ra
Đầu vào
H2.1: Ký hiệu KĐTT
+
-
H2.3: Sơ đồ nguyên lý mạch lặp
U
1
U
2
TH- HTĐC
2.2.3.Mạch đảo tín hiệu
U
2
= - U
1
2.2.4.Mạch so sánh
Mạch so sánh dùng để so sánh hai tín hiệu trong mạch điều khiển chỉnh lu
thyristor
2.2.5.Mạch hạn chế
Mạch hạn chế thờng dùng để hạn chế lợng đặt dòng điện hoặc mômen và hạn
chế tín hiệu điều khiển
2.2.6.Một số mạch khác ( Đọc tham khảo trong tài liệu)
2.3. Các bộ điều chỉnh
Bộ điều chỉnh là một trong các phần tử quan trọng nhất trong hệ điều chỉnh tự
động TĐĐ bởi vì nó đảm bảo chất lợng động và tĩnh của hệ.
Bộ điều chỉnh có hai nhiệm vụ
1. Khuếch đại tín hiệu sai lệch nhỏ của hệ
2. Tạo hàm điều khiển đảm bảo chất lợng động và tĩnh của hệ
Nguyên Đăng Toàn
12
+
-
H2.4: Sơ đồ nguyên lý mạch đảo
U
1
R
R
U
2
+
-
H2.5: Sơ đồ nguyên lý mạch so sánh
U
1
R
U
2
R
U
2
H2.6: Sơ đồ nguyên lý mạch hạn chế
+
-
U
1
U
2
+ U
n
- U
n
D
+
D
-
U
+
U
-
P
1
P
2
U
+
U
-
U
1
U
2
H2.7: Đặc tính khâu hạn chế
TH- HTĐC
Tuỳ theo loại tín hiệu điều khiển mà ta có các bộ điều chỉnh tơng tự, bộ điều
chỉnh xung và bộ điều khiển số.
2.3.1.Một số bộ điều chỉnh tơng tự
2.3.1.1.Bộ điều chỉnh tỷ lệ P
Sơ đồ nguyên lý
`
Trong đó: U
1w
là đại lợng đặt
U
1
là đại lợng đo lờng
Hàm truyền đạt của bộ điều chỉnh
R
1
2
1
2
pR
K
R
R
U
U
F ===
)(
2.3.1.2.Bộ điều chỉnh tích phân (I)
Sơ đồ nguyên lý
Hàm truyền của bộ điều chỉnh
I12
R
p
1
RpC
1
pF
==)(
Trong đó:
I
= R
1
C
2
là hằng số thời gian tích phân
Tín hiệu theo thời gian
t
U
dtU
1
tU
1
t
0
12
=
=
)(
2.3.1.3.Bộ điều chỉnh tích phân tỷ lệ PI
Sơ đồ nguyên lý
Nguyên Đăng Toàn
13
H2.8: Sơ đồ mạch nguyên lý
+
-
U
1w
R
1
R
2
U
2
R
1
U
1
H2.9: Đặc tính của bộ điều chỉnh
t
U
2
U
2
=K
R
.U
1
U
1
0
U
2
=K
R
.U
1
H2.10: Sơ đồ mạch nguyên lý
+
-
U
1w
R
1
C
2
U
2
R
1
U
1
H2.11: Đặc tính của bộ điều chỉnh
t
U
2
0
TH- HTĐC
Hàm truyền đạt của bộ điều chỉnh
p
1
KpF
I
RR
+=)(
Với
1
2
R21I
R
R
KCR == ;
Có thể viết hàm truyền đạt ở dạng khác
p
p1
KpF
R
R
RR
+
=)(
với
22R
1
2
R
CR
R
R
K == ;
2.3.1.4. Bộ điều chỉnh tỷ lệ, tích phân, đạo hàm PID
Sơ đồ nguyên lý
Hàm truyền đạt của bộ điều chỉnh
p
1pp
KpF
I
I
2
DI
RR
++
=)(
Trong đó:
1
2
3
32
R
R
C
C
RR
K
++
=
;
3
1
32
D21I
C
R
RR
CR == ;
Nếu chọn tham số R
2
C
2
+ R
3
C
3
>> R
3
C
2
hay
1
C
C
R
R
2
3
3
2
>>+
Nguyên Đăng Toàn
14
H2.14: Sơ đồ mạch nguyên lý
H2.15: Đặc tính của bộ điều chỉnh
+
-
U
1w
R
1
C
2
U
2
R
1
U
1
R
2
t
U
2
0
U
1
)(
2
3
1R
1UK
+
C
3
R
3
U
1
R
2
K
H2.12: Sơ đồ mạch nguyên lý
+
-
U
1w
R
1
C
2
U
2
R
1
U
1
H2.13: Đặc tính của bộ điều chỉnh
t
U
2
0
I
R
2
R
U
1
U
1
K
R
U
1
TH- HTĐC
và R
2
>> R
3
thì
1
RR
R
32
2
=
+
thì hàm truyền bộ điều chỉnh PID có thể viết
2
32
RR
p
p1p1
KpF
++
=
))((
)(
Trong đó:
333222
1
2
R
CRCR
R
R
K === ;;
2.3.2. Các bộ điều chỉnh xung số ( Đọc trong tài liệu )
2.4.Thiết bị đo lờng
Trong hệ thống điều chỉnh tự động truyền động điện cần phải đo các tham số
nh điện áp, dòng điện, tốc độ, vị trí, mômen v.v
Yêu cầu của thiết bị đo
1. Đo chính xác trong chế độ động và chế độ tĩnh
2. Không bị nhiễu loạn tác động từ bên ngoài
3. Đáp ứng nhanh
2.4.1. Đo dòng điện xoay chiều
Có rất nhiều cách đo dòng xoay chiều, song cách đo đơn giản nhất là dùng biến
dòng
``
Hàm truyền của biến dòng
PT1
K
pI
pU
pF
i
i
1
I2
I
+
==
)(
)(
)(
trong đó: K
i
= P
I
R
1
là hệ số tỷ lệ
T
i
= R.C là hằng số thời gian bộ lọc
P
I
là tỷ số biến dòng
2.4.2. Đo tốc độ
1. Đo bằng máy phát tốc
Hàm truyền đạt của máy phát tốc
Nguyên Đăng Toàn
15
I
a
R
0
I
b
R
0
I
c
R
0
U
2I
0
I2
U
R
R
1
D
0
C
I
2
H2.16: Mạch đo dòng xoay chiều ba pha
TH- HTĐC
pT1
K
p
pU
pF
+
=
=
)(
)(
)(
Trong đó K
là hệ số tỷ lệ
T
là hằng số thời gian bộ lọc
2. Đo tốc độ bằng máy KVX ( Encoder) ( Tự tìm hiểu trong các tài liệu tham khảo)
Nguyên Đăng Toàn
16
R
C
R
t
U
H2.17: Mạch nguyên lý đo tốc độ
TH- HTĐC
Chơng 3:
Mô hình toán học của các bộ biến đổi bán dẫn công suất
Bộ biến đổi (BBĐ) là thiết bị điện - điện tử nhằm biến đổi và điều khiển năng l-
ợng điẹn sao cho phù hợp với yêu cầu của phụ tải. Truyền động điện là một trong
những lĩnh vực ứng dụng rộng rãi các BBĐ, nhất là để điều chỉnh tốc độ động cơ.
Các bộ biến đổi thông dụng
1. Mạch chỉnh lu ( Rectifier)
2. Mạch điều chỉnh điện áp xoay chiều ( AC voltage controllers)
3. Mạch điều chỉnh điện áp một chiều ( chopper)
4. Các bộ biến tần ( inverters)
3.1. Mô hình toán học chỉnh lu điều khiển
)1)(1()1)(1()(
)(
)(
pTpT
K
pTpT
U
pU
pU
pF
vok
cl
vok
d
k
d
CL
++
=
++
==
Trong đó: K
cl
là hệ số khuếch đại của mạch chỉnh lu
T
đk
là hằng số thời gian của mạch điều khiển
T
v0
là hằng số thời gian ứng với quá trình chuyển mạch
Thờng chọn
=
.m
T
0v
với m là số xung áp đầu ra
3.2. Mô hình toán học bộ băm xung áp một chiều
)1)(1()1)(1()(
)(
)(
pTpT
K
pTpT
U
pU
pU
pF
vok
cl
vok
d
k
d
CL
++
=
++
==
Với
f2
1
T
0v
=
3.3. Mô hình toán học bộ biến tần ( đọc trong tài liệu tham khảo)
Nguyên Đăng Toàn
17
TH- HTĐC
Chơng 4:
Điều chỉnh tự động hệ thống truyền động động cơ một
chiều
4.1. Mô hình toán học động cơ điện một chiều
4.1.1. Mô hình toán học ở chế độ xác lập
Sơ đồ thay thế:
( )
=
=
=
M
K
R
K
U
KE
IKM
2
OO
4.1.2. Mô hình toán học ở chế độ quá độ
Sơ đồ thay thế phần ứng:
`
Nếu các thông số của động cơ là không đổi thì có thể viết đợc các phơng trình
mô tả sơ đồ thay thế.
Phần kích từ:
( ) ( ) ( )
ppNpIRpU
kkkk
+=
Trong đó:
N
k
: số vòng dây cuộn kích từ
R
k
: điện trở cuộn dây kích từ
Phần ứng:
( ) ( ) ( ) ( )
OOO
EppNppILpIRpU
N
++=
hoặc
( ) ( ) ( ) ( )
[ ]
pEppNpU
pT1
R1
pI
N O
O
O
/
+
=
Nguyên Đăng Toàn
18
R
E
H4.1: Sơ đồ thay thế động cơ điện một chiều
+
-
U
I
R
E
H4.2: Sơ đồ thay thế động cơ điện
một chiều ở chế độ quá độ
+
-
U
I
L
TH- HTĐC
Trong đó:
L: điện cảm mạch phần ứng
N
N
: số vòng dây cuộn kích từ nối tiếp
Chú ý: Nếu động cơ một chiều kích từ độc lập thì có N
n
= 0
Phơng trình chuyển động của hệ thống:
( )
= jppMpM
C
)(
4.1.3. Xét trờng hợp khi từ thông kích từ không đổi
Khi dòng điện kích từ động cơ không đổi hoặc khi động cơ đợc kích thích bằng
nam châm vĩnh cửu thì từ thông kích từ là hằng số
Ta có:
( )
=
++=
==
)()()(
)())((
OO
pJppMpIC
pCpT1pIRpU
CconstK
cu
u
u
Từ hệ phơng trình trên ta xây dựng đợc sơ đồ cấu trúc
4.2. Tổng hợp mạch vòng dòng điện khi bỏ qua sức điện động động cơ
Trong các hệ truyền động tự động cũng nh các hệ chấp hành thì mạch vòng điều
chỉnh dòng điện là mạch vòng cơ bản. Chức năng cơ bản của mạch này trong hệ thống
truyền động một chiều và xoay chiều là trực tiếp (hoặc gián tiếp) xác định mô men kéo
của động cơ, ngoài ra còn chức năng bảo vệ, điều chỉnh gia tốc .
Trong đó:
Nguyên Đăng Toàn
19
C
u
Jp
1
O
O
/
pT1
R1
+
U
- E
H4-3:Sơ đồ cấu trúc khi từ thông không đổi
C
u
-
M
c
I
M
R
i
d
U
pT1
K
i
i
+
pT1
R1
O
O
/
+
S
i
U
i
-
-
E
I
F
BBĐ
U
iđ
U
Hình4-4: Sơ đồ khối của mạch vòng dòng điện
TH- HTĐC
T
f
, T
đk
, T
vo
, T, T
i
: Các hằng số thời gian mạch lọc, mạch điều khiển chỉnh lu, sự
chuyển mạch chỉnh lu, phần ứng và xenxor dòng điện
R : điện trở mạch phần ứng
d
U
= K
cl
: hệ số khuếch đại của mạch chỉnh lu
Khi hằng số cơ học lớn hơn nhiều so với hằng số thời gian điện từ thì có thể coi
sức điện động của động cơ không ảnh hởng đến quá trình điều chỉnh của mạch vòng
dòng điện
Sơ đồ cấu trúc thu gọn
Với
))()()()((
)(
O
O
i0vkf
icl
i0
pT1pT1pT1pT1pT1
R
KK
pS
+++++
=
đ
Vì T
f
, T
đk
, T
v0
, T
i
là các hắng số thời gian nhỏ vànhỏ hơn rất nhiều so với T nên ta có
))((
)(
O
O
pT1pT1
R
KK
pS
s
icl
oi
++
=
với T
s
= T
f
+ T
đk
+ T
vo
+ T
i
Từ sơ đồ cấu trúc ta tính đợc hàm truyền hệ kín
)().(
)().(
)(
pSpR1
pSpR
pF
i0i
i0i
+
=
áp dụng tiêu chuẩn môđun tối u thì F(p) = F
MC
(p)
[ ]
)()(
)(
)()(
)().(
)().(
)(
pF1pS
pF
pRpF
pSpR1
pSpR
pF
MCi0
MC
iMC
i0i
i0i
==
+
=
Thay hàm truyền của S
0i
(p) và F
MC
(p) vào ta có
)(.
))((
)().(
)(
O
O
p1p2
R
KK
PT1pT1
p1p2pS
1
pR
icl
s
i0
i
+
++
=
+
=
Vì T
s
là hằng số thời gian nhỏ nên chọn
= T
s
, do đó ta sẽ tìm đợc bộ điều chỉnh
pT2
R
KK
pT1
pR
s
icl
i
O
O
)(
+
=
Có cấu trúc của bộ PI ( tỷ lệ - tích phân)
Nguyên Đăng Toàn
20
R
i
(p)
S
0i
(p)
U
iđ
-
H4-5: Cấu trúc hệ
TH- HTĐC
Mạch nguyên lý của bộ điều chỉnh PI
Với
'
O
O
i
2
1
i
3
1s
icl
K
R
R
K
CRT
CRT2
R
KK
=
=
=
Trong đó:
'
i
K
: hệ số truyền của bản thân xenxơ dòng điện
Từ đó tính đợc
CR
KK
T2R
cli
s2
O
'
=
Để tạo khâu lọc cho bộ điều chỉnh ta nối thêm tụ C
f
song song với R
3
sao cho
R
3
C
f
= T
f
và R
3
(C + C
f
) = T
Và hàm truyền của hệ kín của mạch vòng dòng điện thu đợc
22
ssii
pT2pT21
1
K
1
pU
pI
pF
++
==
đ
)(
)(
)(
4.3. Tổng hợp mạch vòng điều chỉnh tốc độ :
Hệ thống điều chỉnh tốc độ là hệ thống mà đại lợng điều chỉnh là tốc độ góc của
động cơ điện, các hệ này rất thờng gặp trong thực tế kỹ thuật. Hệ thống điều chỉnh tốc
độ đợc hình thành từ hệ thống điều chỉnh dòng điện. Các hệ thống này có thể là đảo
chiều hoặc không đảo chiều
Tuỳ theo yêu cầu của công nghệ mà bộ điều chỉnh tốc độ R
có thể đợc tổng
hợp theo hai tín hiệu điều khiển hoặc theo nhiễu tải M
.c
. Trong trờng hợp chung hệ
thống phải có đặc tính điều chỉnh tốt cả từ hai phía tín hiệu điều khiển và tín hiệu nhiễu
loạn.
Sơ đồ cấu trúc tổng quát của hai vòng điều chỉnh
Nguyên Đăng Toàn
21
H4-6: Sơ đồ mạch nguyên lý
+
-
U
iđ
R
1
C
U
đk
R
2
U
i
R
3
C
f
TH- HTĐC
Từ kết quả tổng hợp bộ điều chỉnh dòng điện ở trên và bỏ qua ảnh hởng của sức
điện động ta có sơ đồ khối mạch vòng bộ điều chỉnh tốc độ nh sau:
Ta có thể chuyển nút cộng M
c
ra ngay sau khối K.
Hằng số thời gian cơ học:
T
c
=
2
K
JR
)(
O
K
Jp
1
=
pTK
R
c
O
Do T
s
là hằng số thời gian nhỏ T
s
nên có thể bỏ qua thành phần 2T
2
s
p
2
trong biểu
thức hàm truyền đạt mạch vòng dòng điện. Từ đó ta có sơ đồ cấu trúc sau:
Nguyên Đăng Toàn
R
i
pT1
K
+
pT1
R1
O
O
/
+
U
i
-
E
I
BBĐ
U
S
U
đ
-
U
R
K
Jp
1
M
-
M
c
HCD
pT1
K
i
i
+
K
S
i
-
U
iđ
U
đk
H4-7: Sơ đồ cấu trúc 2 vòng đièu chỉnh
=
+
n
1i
ii
pNpFpRpF )().()().(
S
U
đ
-
U
R
K
Jp
1
M
-M
c
HCD
H4-8: Sơ đồ cấu trúc thu gọn
22
ssi
pT2pT21
1
K
1
++
22
TH- HTĐC
Khi U
đ
0 và M
c
= 0 (mạch không có nhiễu loạn):
Hàm truyền đạt của đối tợng điều chỉnh:
S
o
=
ci
TKK
KR
O
))((
s
pT21pT1p
1
++
Đặt 2T
s
= 2T
s
+T
.
S
o
ci
TKK
KR
O
)(
'
s
pT21p
1
+
Nh vậy sơ đồ sẽ có dạng nh sau:
Nếu tổng hợp theo phơng pháp tối u đối xứng thì:
F
ĐX
(p) =
3322
p8p8p41
41
+++
+
R
=
KR
TKK
ci
O
'
s
T4
1
.
)(
'
pT
s
8
1
1 +
Nguyên Đăng Toàn
R
-
U
U
đ
S
o
U
đ
=
+
n
1i
ii
pNpFpRpF )().()().(
-
U
S
R
pTK
R
c
O
1/K
M
c
- I
c
I
H4-9:Sơ đồ cấu trúc thu gọn
23
TH- HTĐC
Mạch nguyên lý của bộ điều chỉnh
4.4.Bài tập áp dụng
1. Tổng hợp các bộ điều chỉnh cho hệ truyền động tự động một chiều
Các thông số động cơ: P
dm
= 75kw; U
đm
= 440v; n
đm
= 1000v/phút; I
đm
= 204 (A);
đm
= 0,833; L = 0,00432 (H) ; T
c
= 0,0554 (s).
2. Nếu bộ biến đổi là chỉnh lu cầu 3 pha, xenxơ dòng điện là biến dòng xoay chiều
3 pha, xenxơ tốc độ là máy phát tốc một chiều. Hãy vẽ sơ đồ nguyên lý thể hiện
chi tiết cả mạch điều khiển và mạch động lực
3. Tính toán các thiết bị liên quan trong mạch điều khiển và động lực
4. Tiến hành mô phỏng kiểm chứng kết quả tính toán
Chú ý: Sinh viên thảo luận theo nhóm và báo cáo kết quả trên lớp
Nguyên Đăng Toàn
H4-10: Sơ đồ mạch nguyên lý
+
-
U
đ
R
1
C
U
đk
R
2
U
R
3
+
-
R
4
U
iđ
R
2
U
i
24
TH- HTĐC
Chơng 5:
điều chỉnh tự động hệ thống truyền động động cơ không
đồng bộ
5.1. Mô hình động cơ không đồng bộ khi bỏ qua quá trình quá độ điện từ
Trong trờng hợp quá trình quá độ điện từ xảy ra rất nhanh so với quá trình quá
độ điện cơ thì có thể bỏ qua quá trình quá độ điện từ khi khảo sát động cơ KĐB
Phơng trình đặc tính của động cơ không đồng có tính chất phi tuyến và là hàm
nhiều biến nh điện áp, điện trở rôto, tần số, tốc độ v.v
Giả sử phơng trình đặc tính cơ là hàm của ít nhất hai biến là biến ra tốc độ và
một biến vào nào đó gọi là biến y
M = M(y,)
Do tính chất phi tuyến rất mạnh của các đặc tính của động cơ không đồng bộ
nên dùng phơng pháp tuyến tính quanh điểm làm việc
M = M
B
+ M
y = Y
0
+ y
M
C
= M
CB
+ M
=
B
+
Từ hàm hai biến ta tính đợc các
số gia mômen
+
=
M
y
y
M
M
=
C
C
M
M
Thay vào phơng trình động học dới dạng toán tử
)(pJpMM
C
=
ta đợc
)()()()( pY
y
M
p
M
M
pJp
C
=
+
Từ phơng trình này ta có sơ đồ cấu trúc
Nguyên Đăng Toàn
B
th
S
th
M
M
M
0
y
M
y
M
C
Jp
1
M
y
-
25