chương 2 cơ sở toán học của đo ảnh và các tính chất hình học của ảnh hàng không
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (5.78 MB, 20 trang )
1
CHƯƠNG 2
CƠ SỞ TOÁN HỌC CỦA ĐO ẢNH
VÀ CÁC TÍNH CHẤT HÌNH HỌC
CỦA ẢNH HÀNG KHÔNG
Trần Trung Anh
Bộ môn Đo ảnh và Viễn thám
BỘ GIÁO DỤC VÀ ĐÀO TẠO
TRƯỜNG ĐẠI HỌC MỎ ĐỊA CHẤT
Tran Trung Anh Photogrammetry and Remote Sensing 2
MỤC LỤC
Ảnh đo
Phép chiếu xuyên tâm và phép chiếu trực giao
Mục tiêu của đo ảnh
Các yếu tố hình học cơ bản của ảnh đo
Tỷ lệ ảnh
Các hệ tọa độ dùng trong đo ảnh
Ma trận quay
Các nguyên tố định hướng của ảnh đo
Các bài toán chuyển đổi hệ tọa độ
Các biến dạng hình học trên ảnh hàng không
Tran Trung Anh Photogrammetry and Remote Sensing 3
Ảnh đo
Ảnh đo là hình ảnh thu được của các đối tượng đo, ảnh
đo thỏa mãn những điều kiện kỹ thuật nhất định và
được dùng vào mục đích đo đạc.
Ảnh đo Ảnh giải trí
Tran Trung Anh Photogrammetry and Remote Sensing 4
Ảnh đo là sản phẩm của phép chiếu xuyên tâm
2
Tran Trung Anh Photogrammetry and Remote Sensing 5
1. Nội dung phản ánh trung thực nhưng chưa đầy đủ
và chính xác (hình dáng, kích thước đối tượng đo,
thông tin thuộc tính…);
2. Mức độ chi tiết và khả năng đo đạc phụ thuộc
nhiều yếu tố: điều kiện, phương thức chụp ảnh (tỷ
lệ ảnh, tiêu cự, chiều cao bay chụp, máy chụp
ảnh, môi trường chụp…);
3. Ảnh đo chỉ là nguồn thông tin ban đầu không thể
sử dụng trực tiếp như bản đồ vì ảnh đo có phép
chiếu xuyên tâm, tỷ lệ không đồng nhất, hình ảnh
bị biến dạng
Tính chất của ảnh đo
Tran Trung Anh Photogrammetry and Remote Sensing 6
Ảnh đo và bản đồ
Sản phẩm đầu raTư liệu gốcVị trí
Đầy đủ, được mã hóaVừa thừa, vừa thiếuThông tin
Chính xác, thỏa mãn hạn
sai theo quy định
Biến dạng, xê dịch vị trí điểm
ảnh
Sai số
Đồng nhấtBiến đổiTỷ lệ
Trực giaoXuyên tâmPhép chiếu
Bản đồẢnh đo
Tran Trung Anh Photogrammetry and Remote Sensing 7
Phép chiếu
xuyên tâm
Phép chiếu xuyên tâm và phép
chiếu trực giao
Phép chiếu
trực giao
Tran Trung Anh Photogrammetry and Remote Sensing 8
Phép chiếu xuyên tâm Phép chiếu trực giao
Phép chiếu xuyên tâm và phép
chiếu trực giao
3
Tran Trung Anh Photogrammetry and Remote Sensing 9
Phép chiếu xuyên tâm Phép chiếu trực giao
Phép chiếu xuyên tâm và phép
chiếu trực giao
Tran Trung Anh Photogrammetry and Remote Sensing 10
Mục tiêu của Đo ảnh?
Sản phẩm bản đồ
có phép chiếu trực
giao nhận được từ
ảnh có phép chiếu
xuyên tâm.
Xây dựng thông tin
3D (ba chiều) từ
ảnh 2D (hai chiều)
Tran Trung Anh Photogrammetry and Remote Sensing 11
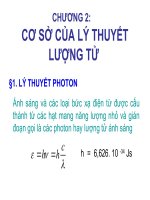
Các yếu tố hình học cơ bản của ảnh đo
E
W
S
.o c
n
O C N
I
.
hi
.
hi
α
α/2
V
V
v
v
T
T
H
f
Tran Trung Anh Photogrammetry and Remote Sensing 12
Các yếu tố hình học cơ bản của
ảnh hàng không
Trục x
Hướng bay chụp
Trục y
Dấu khung
.
n
.
o
.
o’
S
Đường
dây dọi
Trục quang
chính
α
.
x
o
.
y
o
•Điểm chính ảnh o
•Điểm đáy ảnh n
•Khoảng cách chính So≈f
•Điểm tâm chụp S
•Độ cao bay chụp H
•Trục tọa độ ảnh x (hướng
chụp)
•Trục tọa độ ảnh y
•Góc nghiêng của ảnh α
4
Tran Trung Anh Photogrammetry and Remote Sensing 13
Ảnh lý tưởng
S
o,n,c
O,N,C
E
P
W, I
S
o,I
N,n
E
P
W, I
Ảnh hàng không
α=0
0
Ảnh mặt đất
α=90
0
Tran Trung Anh Photogrammetry and Remote Sensing 14
Định lý cơ bản về phép chiếu xuyên tâm
Định lý về phép chiếu điểm
A
a
S
A1
a
S
A2
An
Định lý thuận Định lý nghịch
Tran Trung Anh Photogrammetry and Remote Sensing 15
Định lý về phép chiếu đường
A B
S
a
b
C
D
c
A
S
a
C
C
c
A
A
C
Định lý thuận Định lý nghịch
Tran Trung Anh Photogrammetry and Remote Sensing 16
TỶ LỆ ẢNH
tb0a
hH
f
H
f
AB
ab
m
1
−
===
S
.
a Ảnh b
A B
THỰC ĐỊA
f
H
Mặt thủy chuẩn gốc
H
0
h
tb
a
mabAB
×
=
5
Tran Trung Anh Photogrammetry and Remote Sensing 17
h
tb
TỶ LỆ ĐIỂM ẢNH VÀ TỶ LỆ ẢNH TRUNG BÌNH
A0A)a(a
hH
f
AO
oa
m
1
−
==
B0B)b(a
hH
f
BO
ob
m
1
−
==
TB0a
hH
f
m
1
−
=
Tran Trung Anh Photogrammetry and Remote Sensing 18
TỶ LỆ ẢNH TRÊN ẢNH NGHIÊNG
22
A0a
AAa
yxr
hH
sinrsecf
m
1
SO
oS
AO
ao
m
1
′
+
′
=
′
−
α×
′
−α×
=
′
=
′
′
=
S
.
o’
.
a Ảnh lý tưởng
.
a’ Ảnh nghiêng
.
o
.
n
N
.
c r
.
o r’
.
O
.
A
H
0
Mặt thủy chuẩn gốc
.
h
A
.
O
A
α
f
Tran Trung Anh Photogrammetry and Remote Sensing 19
CÁC YẾU TỐ ẢNH HƯỞNG ĐẾN TỶ LỆ ẢNH
Tiêu cự: f
Độ cao bay chụp: H
Chênh cao địa hình khu chụp: h
Góc nghiêng của ảnh:α
Tran Trung Anh Photogrammetry and Remote Sensing 20
SỰ THAY ĐỔI TIÊU CỰ CHỤP
ẢNH HƯỞNG ĐẾN TỶ LỆ ẢNH
S
,
f
1
,
f
2
,
H
Mặt đất
Ảnh 1
Ảnh 2
H
f
m
1
H
f
m
1
2
2a
1
1a
=
=
6
Tran Trung Anh Photogrammetry and Remote Sensing 21
SỰ THAY ĐỔI CHIỀU CAO BAY CHỤP
ẢNH HƯỞNG ĐẾN TỶ LỆ ẢNH
S
,
f
,
H
2
Mặt đất
Ảnh 1
Ảnh 2
S
,
f
,
H
1
22a
11a
H
f
m
1
H
f
m
1
=
=
Tran Trung Anh Photogrammetry and Remote Sensing 22
CHÊNH CAO ĐỊA HÌNH
ẢNH HƯỞNG ĐẾN TỶ LỆ ẢNH
h
tb
A0A)a(a
hH
f
AO
oa
m
1
−
==
B0B)b(a
hH
f
BO
ob
m
1
−
==
Tran Trung Anh Photogrammetry and Remote Sensing 23
ẢNH HƯỞNG CỦA GÓC NGHIÊNG ẢNH
ĐẾN TỶ LỆ ẢNH
A0a
A0a
hH
f
m
1
0
hH
sinrsecf
m
1
−
=⇒=α
−
α
×
′
−
α
×
=
S
.
o’
.
a Ảnh lý tưởng
.
a’ Ảnh nghiêng
.
o
.
n
N
.
c r
.
o r’
.
O
.
A
H
0
Mặt thủy chuẩn gốc
.
h
A
.
O
A
α
f
Tran Trung Anh Photogrammetry and Remote Sensing 24
Các hệ tọa độ dùng trong đo ảnh
Hệ tọa độ
trong không
gian ảnh
Hệ tọa độ
trong không
gian vật
7
Tran Trung Anh Photogrammetry and Remote Sensing 25
Các hệ tọa độ trong không gian ảnh
−
−
−
=
f
yy
xx
r
0
0
1. Hệ tọa độ mặt phẳng ảnh o’xy
2. Hệ tọa độ không gian ảnh Sxyz
Tran Trung Anh Photogrammetry and Remote Sensing 26
*Các hệ tọa độ trong không gian vật
=
Z
Y
X
R
1. Hệ tọa độ không gian đo ảnh OXYZ
2. Hệ tọa độ quốc gia O
G
X
G
Y
G
Z
G
3. Hệ tọa độ địa lý BLH
Tran Trung Anh Photogrammetry and Remote Sensing 27
*Các hệ tọa độ trong không gian vật
*Hệ tọa độ không gian đo ảnh O-XYZ chọn bất kì
X
Y
Z
y
z
P(X,Y,Z)
O
2
z
x
2
y
2
x
y
x
P
1
x
1
y
1
p
2
Tran Trung Anh Photogrammetry and Remote Sensing 28
Hệ tọa độ không gian đo ảnh O-XYZ
chọn đặc biệt
Y
Z
P(X,Y,Z)
x
2
y
2
X
p
1
x
1
y
1
O1(0,0,0)
Bx
By
Bz
ω
φ
κ
p
2
8
Tran Trung Anh Photogrammetry and Remote Sensing 29
*Các hệ tọa độ trong không gian vật
*Hệ tọa độ, độ cao quốc gia O
G
-X
G
Y
G
Z
G
Định vị: HQVĐịnh vị: Láng
K=0,9996; 0,9999k:=1
P: UTMP: Gauss-kruger
Hòn dấu – Hải
Phòng
E: WGS84E: Krasovski
Độ caoVN2000HN72
Tran Trung Anh Photogrammetry and Remote Sensing 30
Hệ tọa độ địa lý BLH
S
P(λ
λλ
λ,ϕ
ϕϕ
ϕ)
λ
λλ
λ
ϕ
ϕϕ
ϕ
N
Kinh tuyến gốc
(Greenwick)
Xích đạo
Tran Trung Anh Photogrammetry and Remote Sensing 31
XÂY DỰNG MÔ HÌNH TOÁN HỌC CỦA ĐO ẢNH
Xây dựng mối quan hệ toán học giữa
tọa độ điểm ảnh và tọa độ điểm vật
Tran Trung Anh Photogrammetry and Remote Sensing 32
Ma trận quay trong mặt phẳng
9
Tran Trung Anh Photogrammetry and Remote Sensing 33
Xây dựng ma trận quay trong mặt phẳng
α90 + αY’
90 - ααX’
YX
Các trục
=
αα−
αα
=
αα+
α−α
=
2221
1211
aa
aa
A
)cossin
)sincos
A
cos)90cos(
)90cos(cos
A
• Ma trận xoay A là một
ma trận trực giao, có
tính chất A
T
=A
-1
A
T
A=AA
T
=E, 3 điều kiện:
.
a
2
11
+
a
2
12
= 1
.
a
2
21
+ a
2
22
= 1
.
a
11
a
12
+ a
21
a
22
= 0
• A có 4 phần tử (cosin
chỉ hướng) phụ thuộc
1 thành phần
α
Tran Trung Anh Photogrammetry and Remote Sensing 34
Ma trận quay trong không gian
.x
ω
.y
φ
.z(z
κ
)
Quanh
trục
ω
O-ZY.y,Y
.z,Z
φ
O-XZ.z,Z
.x,X
κ
O-XY.x,X
.y,Y
Góc
kẹp
Trên
mặt
phẳng
Trục
kẹp
X
Z
Y
z
y
x
(z
κ
)
(y
φ
)
(x
ω
)
ω
φ
κ
κ
O
Tran Trung Anh Photogrammetry and Remote Sensing 35
Thành lập ma trận quay
Lần lượt quay các góc quay κ, φ, ω
1.
Quay góc thứ nhất κ quanh trục z
09090
Z
κ
90κ90-κY
κ
9090+κκX
κ
.
z
.
y
.
x
rAR
100
0cossin
0sincos
A
κκ
κ
=
κκ
κ−κ
=
.z
(Z
κ
)
.y
.x
Y
κ
X
κ
κ
κ
O
Tran Trung Anh Photogrammetry and Remote Sensing 36
2. Quay góc thứ hai
φ
quanh trục y
φ
φ9090+φZ
φκ
90090Y
φκ
90-φ90φX
φκ
Z
κ
Y
κ
X
κ
rAARAR
cos0sin
010
sin0cos
A
κϕκϕϕκ
ϕ
==
ϕϕ−
ϕϕ
=
Z
φκ
Y
φ
X
κ
X
φκ
φ
O
φ
Z
κ
10
Tran Trung Anh Photogrammetry and Remote Sensing 37
3. Quay góc thứ ba ω quanh trục x
ω
ω90-ω90Z
ωφκ
90+ωω90Y
ωφκ
90900X
ωφκ
Z
φκ
Y
φκ
X
φκ
rAAARARR
cossin0
sincos0
001
A
κϕωϕκωωϕκ
ω
===
ωω
ω−ω=
Z
φκ
Y
φκ
X
ω
ω
O
ω
Z
ωφκ
Y
ωφκ
Tran Trung Anh Photogrammetry and Remote Sensing 38
Ma trận quay trong không gian
=
⇔==
ωϕκωϕκκϕω
z
y
x
A
Z
Y
X
rArAAAR
κκ
κ−κ
ϕϕ−
ϕϕ
ωω
ω−ω==
κϕωωϕκ
100
0cossin
0sincos
cos0sin
010
sin0cos
cossin0
sincos0
001
AAAA
=
ωϕκ
333231
232221
131211
aaa
aaa
aaa
A
ϕω=
κϕω+κω=
κϕω−κω=
ϕω−=
κϕω−κω=
κϕω+κω=
ϕ=
κϕ−=
κϕ=
coscosa
sinsincoscossina
cossincossinsina
cossina
sinsinsincoscosa
cossinsinsincosa
sina
sincosa
coscosa
33
32
31
23
22
21
13
12
11
Tran Trung Anh Photogrammetry and Remote Sensing 39
Tính chất của ma trận quay A
1. A là ma trận trực giao
A
T
=A
-1
A
T
A=AA
T
=E;
Cm: A
T
A=(A
ω
A
φ
A
κ
)
T
(A
ω
A
φ
A
κ
)= A
T
κ
A
T
φ
A
T
ω
A
ω
A
φ
A
κ
=E
3x3
Vì: A
ω
T
A
ω
=E; A
φ
T
A
φ
=E; A
κ
T
A
κ
=E; nên A
T
A=E; đpcm
Có 6 điều kiện của 3 góc quay độc lập φ,ω,κ:
.
a
2
11
+ a
2
12
+ a
2
13
=1;
.
a
2
21
+ a
2
22
+ a
2
23
=1;
.
a
2
31
+ a
2
32
+ a
2
33
=1;
.
a
11
a
12
+ a
21
a
22
+ a
31
a
32
=0;
.
a
11
a
13
+ a
21
a
23
+ a
31
a
33
=0;
.
a
12
a
13
+ a
22
a
23
+ a
32
a
33
=0;
Tran Trung Anh Photogrammetry and Remote Sensing 40
2.
Cosin chỉ hướng phụ thuộc trình tự quay các góc:
κφω khác ωκφ;
A
ωφκ
khác A
φκω
Tính chất của ma trận quay A
ϕκω
ωκϕϕκω
==
333231
232221
131211
aaa
aaa
aaa
AAAA
κωϕ−ωϕκωϕ+ωϕκϕ
κω−κωκ
κωϕ+ωϕκωϕ−ωϕκϕ
=
ϕκω
sinsinsincoscossincossinsincoscossin
cossincoscossin
sinsincoscossinsincoscossinsincoscos
A
ωϕκ
κϕωωϕκ
==
333231
232221
131211
aaa
aaa
aaa
AAAA
ϕωκϕω+κωκϕω−κω
ϕω−κϕω−κωκϕω+κω
ϕκϕ−κϕ
=
ωϕκ
coscossinsincoscossincossincossinsin
cossinsinsinsincoscoscossinsinsincos
sinsincoscoscos
A
11
Tran Trung Anh Photogrammetry and Remote Sensing 41
GÓC XOAY TRONG CHỤP ẢNH HK
φ
ω
κ
Tran Trung Anh Photogrammetry and Remote Sensing 42
Các yếu tố hình học
xác định vị trí tâm
chụp so với mặt
phẳng ảnh và mặt
phẳng ảnh đối với đối
tượng đo nhằm xây
dựng mối quan hệ
chiếu hình phục vụ đo
ảnh gọi là các yếu tố
(nguyên tố) định
hướng của ảnh đo.
Các nguyên tố định hướng của ảnh đo
Tran Trung Anh Photogrammetry and Remote Sensing 43
Các nguyên tố định hướng trong
Các yếu tố hình học xác
định vị trí của tâm chụp
S đối với mặt phẳng ảnh
nhằm phục hồi chùm tia
chiếu như lúc chụp ảnh.
Gồm có 3 nguyên tố:
- Tiêu cự f
- Tọa độ điểm chính ảnh
(x
0
, y
0
)
Xác định các nguyên tố
định hướng trong thông
qua bài toán kiểm định
Tran Trung Anh Photogrammetry and Remote Sensing 44
Khôi phục chùm tia như lúc chụp ảnh
.
a b c P
C B A
Tâm chụp S
c b a P
Tâm chiếu S
.
f, x
0
, y
0
12
Tran Trung Anh Photogrammetry and Remote Sensing 45
Kiểm định với máy chuẩn trực
Tran Trung Anh Photogrammetry and Remote Sensing 46
Bãi kiểm định trong phòng
Tran Trung Anh Photogrammetry and Remote Sensing 47
Bãi kiểm định ngoài trời
Tran Trung Anh Photogrammetry and Remote Sensing 48
Các yếu tố định hướng ngoài
Các yếu tố hình học xác định
vị trí chùm tia trong hệ tọa
độ không gian vật.
Tọa độ gốc S: X
0
, Y
0
, Z
0
Các góc xoay giữa các trục hệ
tọa độ không gian ảnh và hệ
tọa độ không gian vật:
φ,ω,κ
6 yếu tố định hướng ngoài có
thể xác định nhờ vào các
điểm khống chế mặt đất
hoặc thiết bị GPS/INS trong
khi chụp ảnh hàng không
13
Tran Trung Anh Photogrammetry and Remote Sensing 49
Xác định các nguyên tố ĐH ngoài
nhờ các điểm khống chế mặt đất
Tran Trung Anh Photogrammetry and Remote Sensing 50
Xác định các nguyên tố ĐH ngoài
nhờ thiết bị GPS/INS
Tran Trung Anh Photogrammetry and Remote Sensing 51
QUAN HỆ TỌA ĐỘ TRONG ĐO ẢNH
Công thức đồng
phương:
Mục đích: xây dựng
mối quan hệ giữa hệ
tọa độ không gian
ảnh và hệ tọa độ
không gian vật.
Điều kiện: Tâm
chiếu S, điểm ảnh a,
điểm địa vật A nằm
trên một đường
thẳng.
Tran Trung Anh Photogrammetry and Remote Sensing 52
CÔNG THỨC ĐỒNG PHƯƠNG
( ) ( )
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
−−−+−
−−−+−
−=
−−−+−
−−−+−
−=
−−−+−
−=
−
−
−
=
−
−
−
−=⇔−=⇒+=
−
033023013
032022012
0
033023013
031021011
0
033023013
0
0
0
332313
322212
312111
0
0
0
T
0
1
0
ZZaYYaXXa
ZZaYYaXXa
fyy
ZZaYYaXXa
ZZaYYaXXa
fxx
ZZaYYaXXa
1
f
m
1
ZZ
YY
XX
aaa
aaa
aaa
m
1
f
yy
xx
RRA
m
1
rRRA
m
1
rmArRR
14
Tran Trung Anh Photogrammetry and Remote Sensing 53
CÁC BÀI TOÁN CHUYỂN ĐỔI HỆ TỌA ĐỘ PHẲNG
Mục đích: chuyển đổi tọa độ phẳng x’,y’ từ hệ tọa
độ cũ sang tọa độ phẳng x,y trong hệ tọa độ mới.
Ứng dụng: chuyển đổi tọa độ ảnh số (hoặc tọa độ
hệ trục máy đo) sang tọa độ mặt phẳng ảnh, nắn
chỉnh hình học tấm ảnh.
1. Chuyển đổi Helmert
2. Chuyển đổi Affine
3. Chuyển đổi Projective
4. Chuyển đổi đa thức bậc cao
Tran Trung Anh Photogrammetry and Remote Sensing 54
CHUYỂN ĐỔI HELMERT
4 tham số chuyển đổi:
.
a
0
, b
0
, m, α
′
′
αα−
αα
+
=
y
x
cossin
sincos
m
b
a
y
x
0
0
′
+
′
+=
′
+
′
+=
ybxbby
yaxaax
210
210
CHUYỂN ĐỔI AFFINE
6 tham số chuyển đổi:
.
a
0
, a
1
, a
2
, b
0
, b
1
, b
2
Tran Trung Anh Photogrammetry and Remote Sensing 55
CHUYỂN ĐỔI PROJECTIVE
+
′
+
′
+
′
+
′
=
+
′
+
′
+
′
+
′
=
1ycxc
bybxb
y
1ycxc
ayaxa
x
21
321
21
321
8 tham số chuyển
đổi:
.
a
1
, a
2
, a
3
, b
1
, b
2
,
b
3
, c
1
, c
2
CHUYỂN ĐỔI ĐA THỨC BẬC CAO
′′
=
′′
=
∑∑
∑∑
= =
−
= =
−
n
0i
0
ij
jij
ij
n
0i
0
ij
jij
ij
yxby
yxax
.
n – số bậc của đa thức.
.
a
ij
, b
ij
– các tham số
chuyển đổi, có số lượng
là 2*[n(n+1)/2+n+1]
Tran Trung Anh Photogrammetry and Remote Sensing 56
1. Sai số do biến dạng phim ảnh
2. Sai số do ép phim không phẳng
3. Sai số do méo hình kính vật
1.
Sai số méo hình kính vật xuyên tâm
2.
Sai số méo hình kính vật tiếp tuyến
4. Sai số do chiết quang khí quyển
5. Sai số do độ cong trái đất
6. Sai số tổng hợp của xê dịch vị trí điểm ảnh
Gây nên sự xê dịch vị trí điểm ảnh (chủ yếu là xê
dịch hệ thống). Cần phải tính toán xác định sự
xê dịch này để hiệu chỉnh vào trị đo tọa độ ảnh
nâng cao độ chính xác.
HIỆU CHỈNH TỌA ĐỘ ẢNH
15
Tran Trung Anh Photogrammetry and Remote Sensing 57
Xuất hiện: chủ yếu tuân theo quy luật của phép
biến đổi affine khi sự biến dạng theo các trục, các
hướng là khác nhau. Do quá trình hóa ảnh…
Điều kiện loại trừ: có các dấu khung chuẩn có tọa
độ được kiểm định và tọa độ đo trên ảnh để giải ra
các hệ số của phép biến đổi hình học affine,
projective…
SAI SỐ BIẾN DẠNG PHIM ẢNH
′
+
′
+=
′
+
′
+=
ybxbby
yaxaax
210
210
+
′
+
′
+
′
+
′
=
+
′
+
′
+
′
+
′
=
1ycxc
bybxb
y
1ycxc
ayaxa
x
21
321
21
321
Tran Trung Anh Photogrammetry and Remote Sensing 58
SAI SỐ ÉP PHIM KHÔNG PHẲNG
.
f
S
.
dr r
.
dh
Mặt phẳng lý thuyết
ép phim
Mặt phẳng ảnh thực tế
f
r
dhdr
dh
dr
f
r
=⇒=
Xuất hiện: Do ép phim không sát với khung chứa
phim trong quá trình chụp, ép phim không sát với
mặt nhận ảnh trong quá trình in ảnh dương bản.
Điều kiện hạn chế: ép phim phải dùng bộ phận hút
chân không, hoặc nén khí với áp lực cao để ép phim
Tran Trung Anh Photogrammetry and Remote Sensing 59
Máy in ép phim dương bản
Tran Trung Anh Photogrammetry and Remote Sensing 60
SAI SỐ MÉO HÌNH KÍNH VẬT
GS BROWN (1961)
Méo hình kính vật xuyên tâm
Méo hình kính vật tiếp tuyến
16
Tran Trung Anh Photogrammetry and Remote Sensing 61
SAI SỐ MÉO HÌNH KÍNH VẬT XUYÊN TÂM
* Tia sáng bị thay đổi
hướng khi đi qua tâm
kính vật.
* Nguyên nhân:
-Kính vật góc rộng
-Chế tạo thấu kính có
vết rạn.
* Biến dạng dọc theo
bán kính hướng tâm
(đến điểm chính ảnh)
của điểm ảnh.
* Có thể loại trừ
Tran Trung Anh Photogrammetry and Remote Sensing 62
Các dạng méo hình xuyên tâm
Tran Trung Anh Photogrammetry and Remote Sensing 63
Hiệu chỉnh sai số méo hình xuyên tâm
( )
( )
( ) ( )
2
0
2
0
5
3
3
21
0
0
yyxxr
rKrKrKdr
r
dr
yyy
r
dr
xxx
−
′
+−
′
=
++=
−
′
=∆
−
′
=∆
Tran Trung Anh Photogrammetry and Remote Sensing 64
SAI SỐ MÉO HÌNH KÍNH VẬT TIẾP TUYẾN
Nguyên nhân:
Sự lắp ráp không đồng
trục giữa các thấu kính
17
Tran Trung Anh Photogrammetry and Remote Sensing 65
Hiệu ứng của méo hình tiếp tuyến
.
φ
0
t
r
ụ
c
c
ó
m
é
o
h
ì
n
h
l
ớ
n
n
h
ấ
t
t
r
ụ
c
c
ó
m
é
o
h
ì
n
h
=
0
.
φ
Tran Trung Anh Photogrammetry and Remote Sensing 66
Công thức hiệu chỉnh méo hình tiếp tuyến
Conrady-Brown
( )
( )
ϕ
+−ϕ+++=δ
ϕ−ϕ
−+++=δ
0
2
2
0
2
6
3
4
2
2
1
0
2
0
2
2
6
3
4
2
2
1
cos
r
y2
1sin
r
yx2
rJrJrJy
cos
r
yx2
sin
r
x2
1 rJrJrJx
(
)
[
]
[
]
( )
[ ][ ]
+++++=δ
+++++=δ
rPrP1yxP2y2rPy
rPrP1yxP2x2rPx
4
4
2
31
22
2
4
4
2
32
22
1
1
3
4
1
2
3
0
12
0
11
22
00
J
J
P
J
J
PcosJPsinJP
yxryyyxxx
==ϕ=ϕ−=
+=−
′
=−
′
=
Tran Trung Anh Photogrammetry and Remote Sensing 67
SAI SỐ DO CHIẾT QUANG KHÍ QUYỂN
T
0
, D, P, CO
2
…
Tran Trung Anh Photogrammetry and Remote Sensing 68
Định Luật Snell:
.
n
i
– chiết suất của lớp không khí i
.
dn – số gia chiết suất giữa 2 lớp không khí
.
θ – góc tia sáng tới
.
θ+dα – góc tia khúc xạ khi đi qua 2 lớp không khí
Khai triển và tổng hợp có:
.
n
0
- chiết suất không khí tại tâm chụp
,
.
n
p
– chiết suất không khí tại điểm mặt đất
Xây dựng công thức tính sai số do
chiết quang khí quyển
(
)
(
)
α
+
θ
=
θ
+
dsinnsindnn
iiii
( )
0
p
0
p
0
p
n
n
n
n
nlntan
n
dn
tandtan
n
dn
d θ=θ=α=α⇒θ=α
∫ ∫
α
α
18
Tran Trung Anh Photogrammetry and Remote Sensing 69
Tìm được dθ theo công thức
Trong đó K là hằng số khúc xạ của khí quyển.
Đối với ảnh hàng không, θ được biểu diễn
qua bán kính hướng tâm của điểm ảnh
.
dr –
sai số vị trí điểm do chiết quang khí quyển
( )
θ
+
=⇒∴θ
+=θθ+=θθ=
θ
=
d
f
rf
drd
f
r
1fdtan1fdsecfdr
tan
f
r
22
2
2
22
θ=
α
=θ tanK
2
d
Xây dựng công thức tính sai số do
chiết quang khí quyển
rkrkrkdr
5
3
3
21
+++=
Tran Trung Anh Photogrammetry and Remote Sensing 70
Xây dựng công thức tính sai số do
chiết quang khí quyển
+=∴
⇒
+
=θ
+
=⇒θ=θ
2
3
2222
f
r
rKdr
f
r
K
f
rf
tanK
f
rf
drtanKd
( ) ( )
( ) ( )
−
′
+=−
′
=δ
−
′
+=−
′
=δ
0
2
2
0
0
2
2
0
yy
f
r
1K
r
dr
yyy
xx
f
r
1K
r
dr
xxx
Hiệu chỉnh cho tọa độ ảnh
Vấn đề: Tìm hằng số K
Tran Trung Anh Photogrammetry and Remote Sensing 71
(
)
(
)
[
]
hH202,01hH000013,0K
00
+⋅−−⋅=
+−
−
=
250H6H
hH
H
00241,0
K
0
2
0
22
0
0
Công thức thực nghiệm của K
( ) ( ) ( )
[
]
245,4
0
256,5
0
256,5
0
H02257,01277H02257,01h022576,01
H
001225,0
K −∗−−−⋅−=
1. Mô hình Bertram ADRC
(1959 TT phát triển không gian Rome)
2. Mô hình Saastamoinen (H
0
<=11km )
3. Mô hình H
0
<= 9km
Tran Trung Anh Photogrammetry and Remote Sensing 72
Sự xê dịch vị trí điểm ảnh do độ cong trái đất
E
M
0
M’
M
h
O
R
K
m
m
o
f
k
H
δr
c
S
n
P
G
N
θ
S
R
2
3
c
c
0c
2
22
a
2
2
0
f
R
2
rH
r
H
h
rr
H
h
NM
MM
r
r
fR2
rH
h
fR
Hr
R
mr
R
S
2
R
2
sinR2h
cosRROKONMMh
⋅
⋅
=δ∴
=δ⇒=
′
′
=
δ
⋅
⋅
=
⋅
⋅
=
⋅
==θ
θ
=
θ
=
θ
−
=
−
=
=
19
Tran Trung Anh Photogrammetry and Remote Sensing 73
Ảnh hưởng của chênh cao địa hình
đến sự xê dịch vị trí điểm ảnh
r
H
h
d =
Tran Trung Anh Photogrammetry and Remote Sensing 74
ẢNH HƯỞNG TỔNG HỢP CỦA CÁC SAI SỐ HỆ
THỐNG ĐẾN TỌA ĐỘ ẢNH
;b
3
2
yb
3
2
xbb
3
2
yxbb
3
2
xyb
b
4
3
xbb
4
3
y2bxybxbyby
;b
3
2
yb
3
2
xbb
3
2
xybb
3
2
yxb
b
4
3
ybxybb
4
3
x2bybxbx
2222
12
22
10
22
8
22
6
22
4321
2222
11
22
9
22
7
22
54
22
321
−
−+
−+
−+
+
−+
−−++−=∆
−
−+
−+
−+
+
−++
−−+=∆
Mô hình của GS Ebner (1976): 12 tham số b
i
.
b – cạnh đáy ảnh (cỡ ảnh 23x23cm thì b≈90mm)
Tran Trung Anh Photogrammetry and Remote Sensing 75
ẢNH HƯỞNG CỦA HỆ SỐ 1, 2, 3
Tran Trung Anh Photogrammetry and Remote Sensing 76
ẢNH HƯỞNG CỦA HỆ SỐ 4, 5, 6
20
Tran Trung Anh Photogrammetry and Remote Sensing 77
ẢNH HƯỞNG CỦA HỆ SỐ 7, 8, 9
Tran Trung Anh Photogrammetry and Remote Sensing 78
ẢNH HƯỞNG CỦA HỆ SỐ 10, 11, 12
Tran Trung Anh Photogrammetry and Remote Sensing 79
Sự khác nhau giữa phép chiếu xuyên tâm và phép chiếu
trực giao
Hiểu rõ mục tiêu của đo ảnh
Các yếu tố hình học cơ bản của ảnh đo
Tỷ lệ ảnh và các yếu tố ảnh hưởng đến tỷ lệ ảnh
Mục đích sử dụng của các hệ tọa độ dùng trong đo ảnh
Nguyên nhân sinh ra ma trận xuay và cách xây dựng ma
trận xoay
Bản chất và số lượng của các yếu tố định hướng của ảnh đo
Các bài toán chuyển đổi hệ tọa độ
Các biến dạng hình học trên ảnh hàng không, nguyên nhân
xuất hiện và công thức loại trừ
Các nội dung cần nắm bắt được