Ứng dụng công nghệ GPS xây dựng lưới địa chính phục vụ công tác đo đạc bản đồ địa chính cấp xã, huyện vũ thư, tỉnh thái bình
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (1.48 MB, 82 trang )
i
ĐẠI HỌC THÁI NGUYÊN
TRƯỜNG ĐẠI HỌC NÔNG LÂM
--------- ---------
BÙI NGỌC THẠCH
ỨNG DỤNG CÔNG NGHỆ GPS XÂY DỰNG
LƯỚI ĐỊA CHÍNH PHỤC VỤ CÔNG TÁC ĐO ĐẠC BẢN ĐỒ
ĐỊA CHÍNH CẤP XÃ, HUYỆN VŨ THƯ, TỈNH THÁI BÌNH
Chuyên ngành: Quản lý đất đai
Mã số ngành: 60.85.01.03
LUẬN VĂN THẠC SĨ QUẢN LÝ ĐẤT ĐAI
Người hướng dẫn khoa học: PGS.TS Đàm Xuân Vận
PHÒNG QLĐTS ĐH
KHOA QLTN
Thái Nguyên, 2016
GIẢNG VIÊN HƯỚNG DẪN
i
LỜI CAM ĐOAN
Tôi xin cam đoan số liệu và kết quả nghiên cứu trong luận văn này là trung
thực và chưa được sử dụng để bảo vệ một học vị nào. Nội dung đề tài này là những
kết quả nghiên cứu, những ý tưởng khoa học được tổng hợp từ công trình nghiên
cứu, các công tác thực nghiệm, các công trình sản xuất do tôi trực tiếp tham gia
thực hiện.
Tôi xin cam đoan, các thông tin trích dẫn trong luận văn đều đã được chỉ rõ
nguồn gốc.
Thái Nguyên, ngày 03 tháng 11 năm 2016
Tác giả
Bùi Ngọc Thạch
ii
LỜI CẢM ƠN
Để hoàn thành được đề tài, tôi xin gửi lời cảm ơn chân thành đến:
Ban giám hiệu Trường Đại học Nông Lâm Thái Nguyên, khoa quản lý tài nguyên,
cùng các thầy cô đã giảng dạy, truyền đạt kiến thức cho tôi trong suốt thời gian tôi tham
gia khóa học của Trường.
PGS. TS. Đàm Xuân Vận đã hết lòng quan tâm, trực tiếp hướng dẫn tôi trong
quá trình thực hiện đề tài.
Tôi cũng xin gửi lời cảm ơn chân thành đến gia đình, bạn bè đã giúp đỡ, động
viên và đóng góp ý kiến cho tôi trong suốt quá trình học tập và hoàn thành đề tài.
Thái Nguyên, ngày 03 tháng 11 năm 2016
Tác giả
Bùi Ngọc Thạch
iii
MỤC LỤC
LỜI CAM ĐOAN
LỜI CẢM ƠN
DANH MỤC CÁC TỪ VIẾT TẮT
DANH MỤC CÁC BẢNG
DANH MỤC CÁC HÌNH
MỞ ĐẦU ....................................................................................................................... 1
1. Tính cấp thiết của đề tài ............................................................................................. 1
2. Mục tiêu chung .......................................................................................................... 2
3. Mục tiêu cụ thể........................................................................................................... 2
4. Ý nghĩa khoa học và thực tiễn của đề tài ................................................................... 2
Chương 1. TỔNG QUAN TÀI LIỆU ......................................................................... 3
1.1. Khái quát về hệ thống định vị toàn cầu GPS .......................................................... 3
1.1.1. Khái niệm về GPS................................................................................................ 3
1.1.2. Các thành phần của GPS ...................................................................................... 3
1.1.3. Nguyên lý định vị GPS ........................................................................................ 6
1.1.4 . Các nguồn sai số trong định vị GPS ................................................................. 13
1.2.1. Khái niệm, nguyên tắc thiết kế lưới ................................................................... 16
1.2.2 . Cơ sở toán học của lưới địa chính .................................................................... 16
1.2.3. Mật độ điểm khống chế ..................................................................................... 19
1.3. Công tác thành lập bản đồ địa chính ..................................................................... 20
1.3.1. Hệ thống lưới khống chế .................................................................................... 20
1.3.2. Lưới tọa độ địa chính đảm bảo độ chính xác diện tích thửa đất ........................ 27
1.3.3. Công tác thành lập bản đồ địa chính ........................................................ 27
1.4. Tình hình ứng dụng công nghệ GPS trong thành lập lưới khống chế .................. 29
1.4.1. Tình hình nghiên cứu ứng dụng công nghệ GPS trong thành lập lưới
trên thế giới ............................................................................................ 29
1.4.2. Tình hình nghiên cứu ứng dụng công nghệ GPS trong thành lập lưới ở
Việt Nam ................................................................................................ 31
Chương 2. ĐỐI TƯỢNG, NỘI DUNG VÀ PHƯƠNG PHÁP NGHIÊN CỨU .... 34
2.1. Đối tượng phạm vi nghiên cứu ............................................................................. 34
2.1.1. Đối tượng nghiên cứu ........................................................................................ 34
iv
2.1.2. Phạm vi nghiên cứu ........................................................................................... 34
2.2. Nội dung nghiên cứu............................................................................................. 34
2.2.1 Khái quát đặc điểm điều kiện tự nhiên, KTXH huyện Vũ Thư. ......................... 34
2.2.2 Thực trạng công tác đo đạc và thành lập bản đồ địa chính huyện Vũ Thư. ....... 34
2.2.3. Ứng dụng công nghệ GPS để xây dựng lưới địa chính phục vụ việc đo vẽ
bản đồ địa chính tỷ lệ lớn của huyện Vũ Thư, tỉnh Thái Bình (sơ đồ thiết
kế, thiết bị đo, phương pháp đo, xử lý số liệu đo, mật độ điểm…) ............... 34
2.2.4 So sánh hai phương pháp đo động thời gian thực trong công nghệ GPS đo
lưới kinh vĩ thay thế lưới kinh vĩ bằng máy toàn đạc điện tử. ........................ 34
2.2.5. Đánh giá và đề xuất giải pháp khả năng ứng dụng công nghệ GPS trong việc
xây dựng lưới địa chính của tỉnh Thái Bình. ................................................. 34
2.3. Phương pháp nghiên cứu ...................................................................................... 34
2.3.1. Phương pháp thu thập số liệu............................................................................. 34
2.3.2. Phương pháp đo đạc thực nghiệm ..................................................................... 35
2.3.3. Phương pháp tổng hợp viết báo cáo................................................................... 37
2.3.4. Phương pháp xử lý số liệu, đánh giá kết quả ..................................................... 37
Chương 3. KẾT QUẢ NGHIÊN CỨU VÀ THẢO LUẬN ..................................... 38
3.1. Khái quát đặc điểm điều kiện tự nhiên, KTXH huyện Vũ Thư ............................ 38
3.1.1 Vị trí địa lý .......................................................................................................... 38
3.1.2. Đặc điểm tự nhiên .............................................................................................. 39
3.1.2.1. Địa hình ........................................................................................................... 39
3.1.2.2. Khí hậu ............................................................................................................ 39
3.1.2.3. Chế độ thuỷ văn .............................................................................................. 41
3.1.2.4. Đất ................................................................................................................... 41
3.1.2.5. Hệ thống giao thông ........................................................................................ 42
3.1.2.6. Yếu tố địa chính .............................................................................................. 43
3.1.3. Dân cư, kinh tế, xã hội ....................................................................................... 43
3.1.3.1. Dân số và lao động.......................................................................................... 43
3.1.3.2. Kinh tế ............................................................................................................. 44
3.1.3.3. Xã hội .............................................................................................................. 45
3.2. Thực trạng công tác đo đạc và thành lập bản đồ địa chính huyện Vũ Thư .......... 47
3.2.1. Tình hình tư liệu bản đồ phục vụ khảo sát, thiết kế lưới ................................... 47
3.2.2. Đánh giá độ chính xác lưới địa chính ................................................................ 48
v
3.3. Ứng dụng công nghệ GPS để xây dựng lưới địa chính phục vụ việc đo vẽ bản
đồ địa chính tỷ lệ lớn của huyện Vũ Thư, tỉnh Thái Bình ............................. 50
3.3.1. Kết quả khảo sát thiết kế mạng lưới địa chính thành lập lưới địa chính huyện
Vũ Thư Lập bằng Công nghệ GPS ................................................................ 50
3.3.2. Các yêu cầu kỹ thuật và qui trình tính toán bình sai lưới GPS .......................... 52
3.3.3. Kết quả tính bình sai lưới................................................................................... 52
3.4. So sánh hai phương pháp đo động thời gian thực trong công nghệ GPS đo
lưới kinh vĩ thay thế lưới kinh vĩ bằng máy đạc điện tử ................................ 61
3.4.1. Sử dụng công nghệ GPS đo động thời gian thực đo 8 điểm lưới khống chế đo vẽ tại
xã Duy Nhất.................................................................................................... 61
3.4.2. Sử dụng công nghệ toàn đạc điện tử đo 8 điểm lưới khống chế đo vẽ tại xã
Duy Nhất, huyện Vũ Thư, tỉnh Thái Bình. .................................................... 63
3.4.3. Kết quả so sánh hai phương pháp đo động thời gian thực trong công nghệ
GPS đo lưới kinh vĩ thay thế lưới kinh vĩ bằng máy toàn đạc điện tử ........... 64
3.4.4. Đánh giá ưu điểm, hạn chế của việc Ứng dụng GPS đo động thời gian thực
và đề xuất số giải pháp một trong xây dựng lưới kinh vĩ ............................... 64
3.5. Đánh giá và đề xuất giải pháp khả năng ứng dụng công nghệ GPS trong việc
xây dựng lưới địa chính ở tỉnh Thái Bình ...................................................... 66
3.5.1. Đánh giá độ chính xác ....................................................................................... 66
3.5.2. Đề xuất quy trình và giải pháp ứng dụng công nghệ GPS trong việc xây
dựng lưới địa chính ở tỉnh Thái Bình. ............................................................ 67
KẾT LUẬN VÀ KIẾN NGHỊ................................................................................... 69
1. Kết luận .................................................................................................................... 69
2. Đề nghị ..................................................................................................................... 69
TÀI LIỆU THAM KHẢO ......................................................................................... 71
PHỤ LỤC
vi
DANH MỤC CÁC TỪ VIẾT TẮT
Chữ viết tắt
Chữ viết đầy đủ
BĐĐC
: Bản đồ địa chính
DOP
: Dilution of Precision
(Độ mất chính xác)
GPS
: Global Positioning System
(Hệ thống định vị toàn cầu)
GCNQSD
: Giấy chứng nhận quyền sử dụng
HDOP
: Horizon Dilution of Precision
(Độ mất chính xác theo phương ngang)
PDOP
: Position Dilution of Precision
(Độ mất chính xác vị trí vệ tinh theo 3D Ratio)
Ratio
: Tỉ số phương sai
Reference Variance : Độ chênh lệch tham khảo RSM
RSM
: Sai số chiều dài cạnh
VDOP
: Vertiacal Dilution of Precision
(Độ mất chính xác theo phương dọc)
X, Y, h
: Tọa Độ X, Y, độ cao thủy chuẩn tạm thời
Mx, My, Mh
: Sai số theo phương x, y h
Mp
: Sai số vị trí điểm
vii
DANH MỤC CÁC BẢNG
Bảng 1.1: Các chỉ tiêu kỹ thuật về độ chính xác lưới địa chính .................................. 24
Bảng 1.2 Chỉ tiêu kỹ thuật lưới đường chuyền ............................................................ 26
Bảng 3.1. Một số yếu tố khí hậu của huyện Vũ Thư năm 2015 ................................. 41
Bảng 3.2: Dân số và lao động của huyện Vũ Thư năm 2012 – 2015 .......................... 43
Bảng 3.3. Tổng giá trị sản xuất theo các ngành qua một số năm ................................ 45
Bảng 3.4: Tọa độ và độ cao các điểm gốc ...................................................................... 49
Bảng 3.5: Bảng trị đo gia số tọa và các chỉ tiêu sai số ............................................... 53
Bảng 3.6: Bảng sai số khép hình.................................................................................. 54
Bảng 3.7: Bảng trị đo, số hiệu chỉnh và trị bình sai góc phương vị ........................... 55
Bảng 3.8: Bảng tọa độ vuông góc không gian sau bình sai ........................................ 56
Bảng 3.9: Bảng tọa độ trắc địa sau bình sai ................................................................ 57
Bảng 3.10: Bảng thành quả tọa độ phẳng và độ cao bình sai ..................................... 58
Bảng 3.11: Bảng chiều dài cạnh, phương vị và sai số tương hỗ ................................. 59
Bảng 3.12: Kết quả lưới kinh vĩ đo GPS động ..................................................................62
Bảng 3.13: Kết quả so sánh 2 phương pháp đo..................................................................64
viii
DANH MỤC CÁC HÌNH
Hình 1.1: Mô hình hình ảnh trái đất và vệ tinh GPS ........................................................ 3
Hình 1.2: Cấu trúc tín hiệu GPS ....................................................................................... 4
Hình 1.3: Các trạm điều khiển GPS .................................................................................. 5
Hình 1.4: Các thành phần chính của GPS ......................................................................... 6
Hình 1.5: Xác định hiệu số giữa các thời điểm................................................................. 7
Hình 1.6: Kỹ thuật giải đa trị tại các máy thu ................................................................... 9
Hình 1.7: Kỹ thuật định vị tuyệt đối ............................................................................... 10
Hình 1.8: Kỹ thuật định vị tương đối .............................................................................. 12
Hình 3.1. Vị trí địa lý huyện Vũ Thư, tỉnh Thái Bình ................................................... 38
Hình 3.2 Sơ đồ lưới địa chính cụm 5 xã huyện Vũ Thư ................................................. 51
Hình 3.3. Sơ đồ lưới kinh vĩ đo bằng công nghệ GPS ...................................................... 62
Hình 3.4 Sơ đồ lưới kinh vĩ đo bằng máy toàn đạc điện tử ............................................. 63
1
MỞ ĐẦU
1. Tính cấp thiết của đề tài
Phát triển và ứng dụng khoa học công nghệ trong mọi lĩnh vực của cuộc
sống, xã hội được coi là con đường nhanh nhất để rút ngắn thời gian thực hiện sự
nghiệp công nghiệp hóa, hiện đại hóa đất nước. Đây cũng chính là vấn đề đang
được toàn Đảng, toàn dân hết sức quan tâm, khi mà khoa học công nghệ đang
từng ngày mở rộng với sự phát triển của nền kinh tế tri thức trong thời đại mới,
thời kỳ hội nhập.
Hệ thống bản đồ địa chính và hồ sơ địa chính trên địa bàn huyện Vũ Thư,
tỉnh Thái Bình trước kia được thành lập theo hệ toạ độ HN-72, độ chính xác tài
liệu bản đồ tuân thủ theo quy định của Quy phạm do Tổng cục Địa chính ban
hành năm 1991. Hiện nay, yêu cầu đặt ra đối với công tác quản lý đất đai là sử
dụng tài nguyên đất một cách hợp lý và hiệu quả nhất nhằm đảm bảo tốt các mục
tiêu phát triển kinh tế và công bằng xã hội, tài nguyên đất được bảo vệ tốt. Vì
vậy, xây dựng một hệ thống quản lý đất đai hiện đại là một nhiệm vụ cần thiết
nhằm bảo vệ môi trường. Một hệ thống quản lý đất đai hiện đại sẽ đảm bảo
quyền lợi hợp lý của nhà nước, nhà đấu tư và người sử dụng đất cũng như mọi
thành phần có liên quan. Hệ thống hồ sơ địa chính gồm bản đồ địa chính và hệ
thống sổ sách địa chính đi kèm phải được thiết lập cho từng thửa đất. Người sử
dụng đất được cấp giấy chứng nhận quyền sử dụng đất là điều kiện tối thiểu để
đưa pháp luật đất đai vào cuộc sống, khắc phục tình trạng vi phạm pháp luật về
đất đai, sử dụng đất không hiệu quả gây lãng phí cho xã hội.
Để thực hiện công tác đo đạc bổ xung, chỉnh lý cập nhật bản đồ địa chính
việc đầu tiên cần tiến hành xây dựng mạng lưới khống chế từ các điểm Địa chính
cơ sở xuống các điểm địa chính cấp I, cấp II, từ đó thành lập lưới đo vẽ và tiến
hành chi tiết đo bản đồ. Ngày nay lưới địa chính cấp I và cấp II được xây dựng
đồng thời không phân cấp (gọi chung là lưới địa chính) đối với hệ thống lưới đo
vẽ hầu như sử dụng phương pháp đường chuyền, gần đây có một số đơn vị sử
dụng phương pháp định vị GPS. Như vậy nhu cầu đặt ra là cần xây dựng hệ
thống lưới khống chế thống nhất trên toàn bộ khu vực, các điểm lưới thiết kế trải
2
đều đảm bảo độ chính xác và thuận lợi cho công tác phát triển lưới khống chế đo
vẽ tiếp theo. Xuất phát từ thực tiễn đó, được sự hướng dẫn của PGS.TS. Đàm
Xuân Vận tôi tiến hành nghiên cứu đề tài:
“Ứng dụng công nghệ GPS xây dựng lưới địa chính phục vụ công tác đo
đạc bản đồ địa chính cấp xã, huyện Vũ Thư, tỉnh Thái Bình”.
2. Mục tiêu chung
Ứng dụng công nghệ GPS vào xây dựng lưới địa chính phục vụ công tác
đo đạc thành lập bản đồ địa chính cấp xã của huyện Vũ Thư, tỉnh Thái Bình.
3. Mục tiêu cụ thể
- Ứng dụng công nghệ GPS trong xây dựng thành lập lưới khống chế phục
vụ đo vẽ bản đồ địa chính tại cấp xã thuộc huyện Vũ Thư, tỉnh Thái Bình.
- Đánh giá kết quả và đề xuất giải pháp ứng dụng phương pháp đo tĩnh
trong công nghệ GPS để thành lập lưới khống chế ở khu vực huyện Vũ Thư, tỉnh
Thái Bình.
4. Ý nghĩa khoa học và thực tiễn của đề tài
Dựa trên công nghệ GPS để xây dựng hệ thống lưới địa chính thay thế cho
phương pháp xây dựng lưới truyền thống, góp phần đưa công nghệ mới vào sản
xuất nhằm nâng cao độ chính xác, mang lại hiệu quả kinh tế - kỹ thuật trong thực
tế sản xuất khi xây dựng lưới khống chế trắc địa nói chung và lưới khống chế địa
chính ở huyện Vũ Thư, tỉnh Thái Bình nói riêng.
ii
LỜI CẢM ƠN
Để hoàn thành được đề tài, tôi xin gửi lời cảm ơn chân thành đến:
Ban giám hiệu Trường Đại học Nông Lâm Thái Nguyên, khoa quản lý tài nguyên,
cùng các thầy cô đã giảng dạy, truyền đạt kiến thức cho tôi trong suốt thời gian tôi tham
gia khóa học của Trường.
PGS. TS. Đàm Xuân Vận đã hết lòng quan tâm, trực tiếp hướng dẫn tôi trong
quá trình thực hiện đề tài.
Tôi cũng xin gửi lời cảm ơn chân thành đến gia đình, bạn bè đã giúp đỡ, động
viên và đóng góp ý kiến cho tôi trong suốt quá trình học tập và hoàn thành đề tài.
Thái Nguyên, ngày 03 tháng 11 năm 2016
Tác giả
Bùi Ngọc Thạch
4
- Mỗi vệ tinh được trang bị máy phát tần số chuẩn nguyên tử chính xác
cao cỡ 10 -12. Máy phát này tạo ra các tín hiệu tần số cơ sở 10,23 MHz và từ đây
tạo ra các sóng tải tần số L1=1575,42 MHz và L2=1227,60 MHz. Để giảm ảnh
hưởng của tầng điện ly người ta sử dụng hai tần số.
- Để phục vụ cho các mục đích và đối tượng khác nhau, các tín hiệu phát đi
được điều biến mang theo các code riêng biệt đó là: C/A- Code, P-Code và Y- Code.
+ C/A-Code (Coarse/Acquisition Code) là code thô được sử dụng rộng rãi.
C/A Code có tính chất code tựa ngẫu nhiên. Tín hiệu mang code này có tần số
thấp (1.023 MHz). C/A Code chỉ điều biến sóng tải L1.
+ P-Code (Precision Code) là code chính xác được sử dụng cho các mục đích
quân sự của Mỹ và chỉ dùng cho các mục đích khác khi được phía Mỹ cho phép. PCode điều biến cả hai sóng tải L1, L2 và là code tựa ngẫu nhiên.
+ Y-Code là Code bí mật được phủ lên P-Code nhằm chống bắt chiếc, gọi
là kỹ thuật AS (Anti Spoosing), chỉ có vệ tinh thuộc các khối từ sau năm 1989
mới có khả năng này.
Hình 1.2: Cấu trúc tín hiệu GPS
(Theo tài liệu Ahmed El-Rabbany (2007), Introduction to GPS) [15]
5
• Đoạn điều khiển (Control Segment)
Có 5 trạm điều khiển trên mặt đất: Hawaii (Thái Bình Dương),
Colorado Springs (Căn cứ không quân Mỹ), Ascension Island (Đại Tây
Dương), Diego Garcia (Ấn Độ Dương) và Kwajalein (Thái Bình Dương).
Nhiệm vụ của đoạn điều khiển là điều khiển toàn bộ hoạt động và chức
năng của các vệ tinh trên cơ sở theo dõi chuyển động quỹ đạo của các vệ tinh
và hoạt động của đồng hồ trên đó. Tất cả các số liệu đo khoảng cách, sự thay
đổi khoảng cách, các số liệu đo khí tượng ở mỗi trạm đều được truyền về trạm
trung tâm. Trạm trung tâm xử lý các số liệu được truyền từ các trạm theo dõi
và số liệu đo của chính nó để cho ra các ephemerit chính xác hoá của vệ tinh
và số hiệu chỉnh cho các đồng hồ vệ tinh. Các số liệu này được truyền trở lại
cho các trạm theo dõi và từ đó truyền tiếp lên cho các vệ tinh cùng các lệnh
điều khiển khác. [10]
Hình 1.3: Các trạm điều khiển GPS [18]
• Đoạn sử dụng (User Segment)
Gồm các máy thu đặt trên mặt đất, bao gồm phần cứng và phần mềm.
- Phần cứng là các máy đo có nhiệm vụ thu tín hiệu vệ tinh để khai thác, sử
6
dụng cho các mục đích, yêu cầu khác nhau của khách hàng.
- Phần mềm có nhiệm vụ xử lý các thông tin để cung cấp tọa độ của máy thu.
Hình 1.4: Các thành phần chính của GPS
(Theo tài Ahmed El-Rabbany (2007), Introduction to GPS) [15]
Các thiết bị sử dụng Máy đo lưới địa chính theo công nghệ GPS là máy
thu tín hiệu vệ tinh 1 hoặc 2 tần số (Trimble Navigation 4000SE, 4000SSE,
4600LS, 4800LS hoặc máy 9600 của hăng South Trung Quốc; máy X20, X90
của hăng Huace Trung Quốc và các loại máy có độ chính xác tương đương khác).
Máy đo lưới kinh vĩ, đo chi tiết bản đồ địa chính là máy toàn đạc điện tử TS02
của hãng Leica Thụy sỹ …[10]
1.1.3. Nguyên lý định vị GPS
1.1.3.1. Các đại lượng đo
Việc định vị bằng GPS thực hiện trên cơ sở sử dụng hai dạng đại lượng đo
cơ bản, đó là đo khoảng cách giả theo các code tựa ngẫu nhiên (C/A-code và Pcode) và đo pha của sóng tải L1, L2 và tổ hợp L1/L2. [1]
7
• Đo khoảng cách giả theo C/A-code và P-code
Code tựa ngẫu nhiên được phát đi từ vệ tinh cùng với sóng tải. Máy thu
GPS cũng tạo ra code tựa ngẫu nhiên đúng như vậy. Bằng cách so sánh code thu
từ vệ tinh và code của chính máy thu tạo ra có thể xác định được khoảng thời
gian lan truyền của tín hiệu code, từ đó dễ dàng xác định được khoảng cách từ vệ
tinh đến máy thu (đến tâm anten của máy thu). Do có sự không đồng bộ giữa
đồng hồ của vệ tinh và máy thu, do có ảnh hưởng của môi trường lan truyền tín
hiệu nên khoảng cách tính theo khoảng thời gian đo được không phải là khoảng
cách thực giữa vệ tinh và máy thu, đó là khoảng cách giả. [15]
1 1 0 0 0 1 1 1 1 0 1 0 0 0
Code chuyền từ vệ tinh
1 1 0 0 0 1 1 1 1 0 1 0 0 0
Code thu được
1 1 0 0 0 1 1 1 1 0 1 0 0 0
∆δ
Code do máy thu tạo ra
∆t
Hình 1.5: Xác định hiệu số giữa các thời điểm
(Theo tài liệu Alfred Leick (1995), GPS Satellite Surveying) [15]
Nếu ký hiệu tọa độ của vệ tinh là xs, ys, zs; tọa độ của điểm xét (máy thu)
là x,y,z; thời gian lan truyền tín hiệu từ vệ tinh đến điểm xét là t, sai số không
đồng bộ giữa đồng hồ trên vệ tinh và trong máy thu là ∆t, khoảng cách giả đo
được là R, ta có phương trình:
R = c(t + ∆t ) = ( x s − x) 2 + ( y s − y ) 2 + ( z s − z ) 2 + c∆t
(1.1)
Trong đó, c là tốc độ lan truyền tín hiệu.
Trong trường hợp sử dụng C/A-code, theo dự tính của các nhà thiết kế hệ
thống GPS, kỹ thuật đo khoảng thời gian lan truyền tín hiệu chỉ có thể đảm bảo
độ chính xác đo khoảng cách tương ứng khoảng 30m. Nếu tính đến ảnh hưởng
của điều kiện lan truyền tín hiệu, sai số đo khoảng cách theo C/A code sẽ ở mức
8
100 m là mức có thể chấp nhận được để cho khách hàng dân sự được khai thác.
Song kỹ thuật xử lý tín hiệu code này đã được phát triển đến mức có thể đảm bảo
độ chính xác đo khoảng cách khoảng 3m, tức là hầu như không thua kém so với
trường hợp sử dụng P-code vốn không dành cho khách hàng đại trà. Chính vì lý
do này mà trước đây Chính phủ Mỹ đã đưa ra giải pháp SA để hạn chế khả năng
thực tế của C/A code. Nhưng ngày nay do kỹ thuật đo GPS có thể khắc phục
được nhiễu SA, Chính phủ Mỹ đã tuyên bố bỏ nhiễu SA trong trị đo GPS từ
tháng 5 năm 2000. [9]
• Đo pha sóng tải
Các sóng tải L1, L2 được sử dụng cho việc định vị với độ chính xác cao.
Với mục đích này người ta tiến hành đo hiệu số giữa pha của sóng tải do máy thu
nhận được từ vệ tinh và pha của tín hiệu do chính máy thu tạo ra. Hiệu số pha do
máy thu đo được ta ký hiệu là Φ (0<Φ<2π).
Khi đó ta có thể viết:
Φ=
2π
λ
( R − N λ + c∆ t )
(1.2)
Trong đó: R là khoảng cách giữa vệ tinh và máy thu;
λ là bước sóng của sóng tải;
N là số nguyên lần bước sóng λ chứa trong R, N còn được gọi là số
nguyên đa trị, thường không biết trước mà cần phải xác định trong thời gian
đo;
∆t là sai số đồng bộ giữa đồng hồ của vệ tinh và máy thu;
Trong trường hợp đo pha theo sóng tải L1 có thể xác định khoảng cách
giữa vệ tinh và máy thu với độ chính xác cỡ cm, thậm chí nhỏ hơn. Sóng tải L2
cho độ chính xác thấp hơn, nhưng tác dụng của nó là cùng với L1 tạo ra khả năng
làm giảm đáng kể tầng điện ly và việc xác định số nguyên đa trị được đơn giản
hơn. [13]
iii
MỤC LỤC
LỜI CAM ĐOAN
LỜI CẢM ƠN
DANH MỤC CÁC TỪ VIẾT TẮT
DANH MỤC CÁC BẢNG
DANH MỤC CÁC HÌNH
MỞ ĐẦU ....................................................................................................................... 1
1. Tính cấp thiết của đề tài ............................................................................................. 1
2. Mục tiêu chung .......................................................................................................... 2
3. Mục tiêu cụ thể........................................................................................................... 2
4. Ý nghĩa khoa học và thực tiễn của đề tài ................................................................... 2
Chương 1. TỔNG QUAN TÀI LIỆU ......................................................................... 3
1.1. Khái quát về hệ thống định vị toàn cầu GPS .......................................................... 3
1.1.1. Khái niệm về GPS................................................................................................ 3
1.1.2. Các thành phần của GPS ...................................................................................... 3
1.1.3. Nguyên lý định vị GPS ........................................................................................ 6
1.1.4 . Các nguồn sai số trong định vị GPS ................................................................. 13
1.2.1. Khái niệm, nguyên tắc thiết kế lưới ................................................................... 16
1.2.2 . Cơ sở toán học của lưới địa chính .................................................................... 16
1.2.3. Mật độ điểm khống chế ..................................................................................... 19
1.3. Công tác thành lập bản đồ địa chính ..................................................................... 20
1.3.1. Hệ thống lưới khống chế .................................................................................... 20
1.3.2. Lưới tọa độ địa chính đảm bảo độ chính xác diện tích thửa đất ........................ 27
1.3.3. Công tác thành lập bản đồ địa chính ........................................................ 27
1.4. Tình hình ứng dụng công nghệ GPS trong thành lập lưới khống chế .................. 29
1.4.1. Tình hình nghiên cứu ứng dụng công nghệ GPS trong thành lập lưới
trên thế giới ............................................................................................ 29
1.4.2. Tình hình nghiên cứu ứng dụng công nghệ GPS trong thành lập lưới ở
Việt Nam ................................................................................................ 31
Chương 2. ĐỐI TƯỢNG, NỘI DUNG VÀ PHƯƠNG PHÁP NGHIÊN CỨU .... 34
2.1. Đối tượng phạm vi nghiên cứu ............................................................................. 34
2.1.1. Đối tượng nghiên cứu ........................................................................................ 34
10
tình trạng này cần sử dụng thêm một đại lượng đo nữa, đó là khoảng cách từ vệ
tinh thứ 4, ta có hệ phương trình:
(XS1- X)2 +(YS1- Y)2 +(ZS1- Z)2 = (R1-c∆t)2
(XS2- X)2 +(YS2- Y)2 +(ZS2- Z)2 = (R2-c∆t)2
(1.3)
(XS3- X)2 +(YS3- Y)2 +(ZS3- Z)2= (R3-c∆t)2
(XS4- X)2 +(YS4- Y)2 +(ZS4- Z)2 = (R4-c∆t)2
Với khoảng cách giả đo đồng thời từ 4 vệ tinh đến máy thu chúng ta sẽ lập
được hệ phương trình dạng (1.3) với 4 ẩn số (X, Y, Z, ∆t). Giải hệ phương trình
trên chúng ta tìm được tọa độ tuyệt đối của máy thu và số hiệu chỉnh đồng hồ của
máy thu. [15]
Trên thực tế với hệ thống vệ tinh hoạt động đầy đủ như hiện nay, số lượng
vệ tinh mà các máy thu quan sát được thường từ 6-8 vệ tinh, khi đó số lượng
phương trình sẽ lớn 4 và nghiệm của phương trình sẽ tìm theo nguyên lý số bình
phương nhỏ nhất.
Hình 1.7: Kỹ thuật định vị tuyệt đối [20]
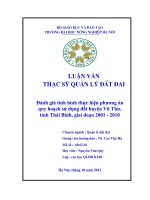
1.1.3.3. Định vị tương đối (Relative Positioning)
Đo GPS tương đối là trường hợp sử dụng hai máy thu GPS đặt ở hai điểm
quan sát khác nhau để xác định ra hiệu tọa độ vuông góc không gian (∆X, ∆Y,
11
∆Z) hay hiệu tọa độ trắc địa mặt cầu (∆B, ∆L, ∆H) giữa chúng trong hệ tọa độ
WGS-84.
Nguyên tắc đo GPS tương đối được thực hiện trên cơ sở sử dụng đại
lượng đo là pha của sóng tải. Để đạt được độ chính xác cao và rất cao cho kết quả
xác định hiệu tọa độ giữa hai điểm xét, người ta đã tạo ra và sử dụng các sai phân
khác nhau cho pha sóng tải nhằm làm giảm ảnh hưởng đến các nguồn sai số khác
nhau như: Sai số của đồng hồ vệ tinh cũng như của máy thu, sai số tọa độ vệ tinh,
sai số số nguyên đa trị,...
Ta ký hiệu Φrj(ti) là hiệu pha của sóng tải từ vệ tinh j đo được tại trạm r
vào thời điểm ti, khi đó nếu hai trạm đo 1 và 2 ta quan sát đồng thời vệ tinh j vào
thời điểm ti, ta sẽ có sai phân bậc một được biểu diễn như sau:
∆1Φj(ti)= Φ2j(ti)- Φ1j(ti)
(1.4)
Trong sai phân này hầu như không còn ảnh hưởng của sai số đồng hồ vệ tinh.
Nếu hai trạm cùng tiến hành quan sát đồng thời hai vệ tinh j và k vào thời
điểm ti, ta có phân sai bậc hai:
∆2Φj,k(ti)= ∆1Φk(ti)- ∆1Φj(ti)
(1.5)
Qua công thức này ta thấy không còn ảnh hưởng của sai số đồng hồ vệ
tinh và máy thu.
Nếu xét hai trạm cùng tiến hành quan sát đồng thời hai vệ tinh j và k vào
thời điểm ti và ti+1, ta sẽ có phân sai bậc ba:
∆3Φj,k = ∆2Φj,k(ti+1)- ∆2Φj,k(ti)
(1.6)
Sai phân này cho phép loại trừ sai số số nguyên đa trị.
Hiện nay hệ thống GPS có khoảng 32 vệ tinh hoạt động. Do vậy, tại mỗi
thời điểm ta có thể quan sát được số vệ tinh nhiều hơn 4. Bằng cách tổng hợp
theo từng cặp vệ tinh sẽ có rất nhiều trị đo, mặt khác thời gian thu tín hiệu trong
đo tương đối thường khá dài vì vậy số lượng trị đo để xác định ra hiệu tọa độ
giữa hai điểm là rất lớn, khi đó bài toán sẽ giải theo phương pháp số bình phương
nhỏ nhất. [15]
12
Hình 1.8: Kỹ thuật định vị tương đối
(Theo tài liệu Alfred Leick (1995), GPS Satellite Surveying) [15]
- Phương pháp đo tĩnh: Phương pháp đo tĩnh được sử dụng để xác định
hiệu tọa độ (hay vị trí tương hỗ) giữa hai điểm xét với độ chính xác cao, nhằm
đáp ứng yêu cầu của công tác Trắc địa địa hình. Trong trường hợp này cần có hai
máy thu, một máy đặt ở điểm đã biết tọa độ còn máy kia đặt tại điểm cần xác
định. Cả hai máy thu đồng thời thu tín hiệu từ một số vệ tinh chung trong một
khoảng thời gian nhất định, thường từ một đến hai ba giờ đồng hồ. Số vệ tinh tối
thiểu cho hai trạm quan sát là 4. Khoảng thời gian quan sát kéo dài là để cho đồ
hình phân bố vệ tinh thay đổi từ đó ta có thể xác định được số nguyên đa trị của
sóng tải và đồng thời là để có nhiều trị đo nhằm đạt độ chính xác cao và ổn định
kết quả quan sát.
Đây là phương pháp đạt được độ chính xác cao nhất trong việc định vị
tương đối bằng GPS, có thể cỡ centimet, thậm chí là milimet ở khoảng cách giữa
hai điểm xét tới hàng chục và hàng trăm kilomet. Nhược điểm của phương pháp
là thời gian đo phải kéo dài hàng giờ, do vậy năng xuất đo thường không cao.
- Phương pháp đo động: Phương pháp đo động cho phép xác định vị trí
tương đối của hàng loạt điểm so với điểm đã biết. Phương pháp này cần có ít
nhất hai máy thu để xác định số nguyên đa trị của tín hiệu vệ tinh, cần phải có
13
một cạnh đáy đã biết được gối lên điểm đã có tọa độ. Sau khi đã xác định số
nguyên đa trị được giữ nguyên để tính khoảng cách từ vệ tinh đến máy thu cho
các điểm đi tiếp sau trong suốt cả chu kỳ đo. Nhờ vậy, thời gian thu tín hiệu tại
điểm đo không phải là một giờ đồng hồ như trong phương pháp đo tĩnh nữa mà
chỉ còn một phút trong phương pháp này.
1.1.3.4. Định vị vi phân (Differential GPS)
Phương pháp này dùng một máy thu đặt cố định tại điểm đã biết tọa độ và
máy thu này có khả năng phát ra tín hiệu vô tuyến, đồng thời có máy di động
khác đặt ở vị trí cần xác định tọa độ. Cả máy cố định và máy di động cần đồng
thời tiến hành thu tín hiệu từ các vệ tinh như nhau. Nếu thông tin từ vệ tinh bị
nhiễu thì kết quả xác định tọa độ của cả máy cố định và máy di động cũng đều bị
sai lệch, độ sai lệch này được xác định trên cơ sở so sánh tọa độ tính ra theo tín
hiệu thu được từ vệ tinh và tọa độ đã biết trước của máy cố định và có thể xem là
như nhau cho cả máy cố định và máy di động. Nó được máy cố định phát đi qua
sóng vô tuyến để máy di động thu nhận mà hiệu chỉnh cho kết quả xác định tọa
độ của mình. [15]
1.1.4 . Các nguồn sai số trong định vị GPS
1.1.4.1. Sai số của đồng hồ
Sai số đồng hồ gồm đồng hồ trên vệ tinh, đồng hồ trong máy thu và sự
không đồng bộ giữa chúng gây ra sai số của đồng hồ trong kết quả đo GPS. Đặc
biệt là trong định vị tuyệt đối sai số này có giá trị tương đối lớn.
Các vệ tinh được trang bị đồng hồ nguyên tử có độ chính xác cao, tính
đồng bộ về thời gian giữa các đồng hồ vệ tinh được giữ trong khoảng 20 nano
giây. Còn các máy thu GPS được trang bị đồng hồ thạch anh chất lượng cao (1
phần 104) đặt bên trong.
Chúng ta biết rằng vận tốc truyền tín hiệu khoảng 3.108m/s, nếu sai số
đồng hồ thạch anh là 10-4s thì sai số khoảng cách tương ứng là 30 m, nếu đồng hồ
nguyên tử sai 10-7s thì khoảng cách sai 3 m.
Với ảnh hưởng như trên, người ta đã sử dụng nguyên tắc định vị tương đối
để loại trừ ảnh hưởng của sai số đồng hồ. [10]
iv
2.1.2. Phạm vi nghiên cứu ........................................................................................... 34
2.2. Nội dung nghiên cứu............................................................................................. 34
2.2.1 Khái quát đặc điểm điều kiện tự nhiên, KTXH huyện Vũ Thư. ......................... 34
2.2.2 Thực trạng công tác đo đạc và thành lập bản đồ địa chính huyện Vũ Thư. ....... 34
2.2.3. Ứng dụng công nghệ GPS để xây dựng lưới địa chính phục vụ việc đo vẽ
bản đồ địa chính tỷ lệ lớn của huyện Vũ Thư, tỉnh Thái Bình (sơ đồ thiết
kế, thiết bị đo, phương pháp đo, xử lý số liệu đo, mật độ điểm…) ............... 34
2.2.4 So sánh hai phương pháp đo động thời gian thực trong công nghệ GPS đo
lưới kinh vĩ thay thế lưới kinh vĩ bằng máy toàn đạc điện tử. ........................ 34
2.2.5. Đánh giá và đề xuất giải pháp khả năng ứng dụng công nghệ GPS trong việc
xây dựng lưới địa chính của tỉnh Thái Bình. ................................................. 34
2.3. Phương pháp nghiên cứu ...................................................................................... 34
2.3.1. Phương pháp thu thập số liệu............................................................................. 34
2.3.2. Phương pháp đo đạc thực nghiệm ..................................................................... 35
2.3.3. Phương pháp tổng hợp viết báo cáo................................................................... 37
2.3.4. Phương pháp xử lý số liệu, đánh giá kết quả ..................................................... 37
Chương 3. KẾT QUẢ NGHIÊN CỨU VÀ THẢO LUẬN ..................................... 38
3.1. Khái quát đặc điểm điều kiện tự nhiên, KTXH huyện Vũ Thư ............................ 38
3.1.1 Vị trí địa lý .......................................................................................................... 38
3.1.2. Đặc điểm tự nhiên .............................................................................................. 39
3.1.2.1. Địa hình ........................................................................................................... 39
3.1.2.2. Khí hậu ............................................................................................................ 39
3.1.2.3. Chế độ thuỷ văn .............................................................................................. 41
3.1.2.4. Đất ................................................................................................................... 41
3.1.2.5. Hệ thống giao thông ........................................................................................ 42
3.1.2.6. Yếu tố địa chính .............................................................................................. 43
3.1.3. Dân cư, kinh tế, xã hội ....................................................................................... 43
3.1.3.1. Dân số và lao động.......................................................................................... 43
3.1.3.2. Kinh tế ............................................................................................................. 44
3.1.3.3. Xã hội .............................................................................................................. 45
3.2. Thực trạng công tác đo đạc và thành lập bản đồ địa chính huyện Vũ Thư .......... 47
3.2.1. Tình hình tư liệu bản đồ phục vụ khảo sát, thiết kế lưới ................................... 47
3.2.2. Đánh giá độ chính xác lưới địa chính ................................................................ 48
15
hưởng của tầng điện ly đã được giảm nhiều, tuy vậy cần lưu ý tới đặc tính của
sóng cực ngắn là truyền thẳng và dễ bị che chắn.
Ảnh hưởng của tầng điện ly tỷ lệ với bình phương tần số, vì thế khi sử
dụng máy thu 2 tần sẽ khắc phục được ảnh hưởng này.
Tuy vậy, ở khoảng cách ngắn (<10km) tín hiệu tới 2 máy coi như đi trong
cùng môi trường, sai số sẽ được loại trừ trong các công thức tính hiệu tọa độ, do
vậy ta nên sử dụng máy một tần, trong khi đó nếu sử dụng máy hai tần có thể bị
nhiễu, làm kết quả kém chính xác.
Để khắc phục ảnh hưởng của tầng đối lưu, người ta quy định chỉ sử dụng
tín hiệu vệ tinh có góc cao trên 15o (hoặc trên 10o).
Hiện nay người ta đang sử dụng một số mô hình khí quyển, trong đó có
mô hình của Hopfield được dùng rộng rãi. [10]
1.1.4.4. Sai số do nhiễu tín hiệu
Ăng ten của máy thu không chỉ thu tín hiệu đi thẳng từ vệ tinh tới mà còn
nhận cả các tín hiệu phản xạ từ mặt đất và môi trường xung quanh. Sai số này gọi
là sai số do nhiễu tín hiệu. Tín hiệu vệ tinh tới máy thu có thể bị nhiễu do một số
nguyên nhân sau:
- Tín hiệu bị phản xạ từ các vật (kim loại, bê tông) gần máy thu.
- Tín hiệu bị nhiễu do ảnh hưởng của các tín hiệu sóng điện từ khác.
- Máy thu GPS đặt gần các đường dây tải điện cao áp.
- Tín hiệu bị gián đoạn do các vật che chắn tín hiệu.
Để khắc phục sai số nhiễu tín hiệu, khi thiết kế điểm đo cần bố trí xa các
trạm phát sóng, các đường dây cao thế,... Không bố trí máy thu dưới các rặng
cây. [10]
1.1.4.5. Sai số do người đo
Người đo có thể phạm các sai lầm như: trong đo chiều cao anten, dọi điểm
định tâm không tốt, đôi khi ghi nhầm chế độ đo cao anten. Để tránh các sai số này
thì người đo GPS cần thận trọng trong định tâm và đo chiều cao anten.
Cần chú ý là sai số do đo chiều cao anten không những ảnh hưởng tới độ
cao của điểm đo mà còn ảnh hưởng tới vị trí mặt bằng.
16
Trong khi thu tín hiệu không nên đứng vây quanh máy thu, không che ô
cho máy. [10]
1.2. Lưới GPS
1.2.1. Khái niệm, nguyên tắc thiết kế lưới
1.2.1.1. Khái niệm về lưới GPS
Lưới GPS gồm các điểm được chôn trên mặt đất nơi ổn định hoặc bố trí
trên đỉnh các công trình vững chắc, kiên cố. Các điểm được liên kết với nhau bởi
các cạnh đo, nhờ các cạnh đo chúng ta sẽ tính toán xác định tọa độ, độ cao của
các điểm trong một hệ thống tọa độ thống nhất. [13]
1.2.1.2. Nguyên tắc thiết kế
Công tác thiết kế lưới phải tuân thủ theo các nguyên tắc sau:
- Lưới thiết kế phải đi từ tổng quát đến chi tiết, từ độ chính xác cao đến
độ chính xác thấp.
- Hệ thống lưới tọa độ cơ sở phải được xây dựng trên cơ sở các điểm tọa
độ Nhà nước cấp cao hơn.
- Lưới tọa độ cơ sở phải được nối vào ít nhất hai điểm cấp cao hơn và gần
khu đo nhất.
- Sai số số liệu gốc của lưới cấp trên ảnh hưởng đến cấp dưới kế cận
không được vượt quá 12%.
- Lưới thiết kế phải đảm bảo đủ mật độ điểm, phủ trùm khu đo, phục vụ
cho công tác đo vẽ bản đồ địa chính theo từng giai đoạn.
- Thường xuyên cập nhật, tiến hành nâng cao độ chính xác bằng cộng
nghệ và kỹ thuật đo tiến tiến.
- Trong quá trình thiết kế cố gắng chọn phương án tối ưu, giá thành rẻ, dễ
thi công, đồng thời đảm bảo độ chính xác trong công tác đo vẽ theo từng cấp
hạng. [2]
1.2.2 . Cơ sở toán học của lưới địa chính
1.2.2.1. Lựa chọn mặt chiếu
Việc thể hiện bề mặt trái đất lên mặt phẳng cần phải có một cơ sở toán học
nhằm thể hiện chính xác và ít bị biến dạng khi khai triển.